一种基于地面监视雷达系统的目标提取方法及系统与流程
本发明属于地面监视雷达领域,涉及地面监视雷达目标提取技术,具体是一种基于地面监视雷达系统的目标提取方法及系统。
背景技术:
1、基于地面监视雷达系统的目标提取方法通常涉及雷达信号处理、目标检测与跟踪算法、信号处理与通信技术、雷达系统工程等方面的知识。基于地面监视雷达系统的目标提取方法是指利用地面监视雷达获取的雷达回波数据,通过信号处理和目标检测算法,从雷达数据中提取出目标的相关信息,如位置、速度、大小等。这种方法通常用于军事、航空航天、安防等领域中对目标进行实时监测和识别。
2、现有的地面监视雷达目标提取方案,大都通过模糊化处理对目标回波信息杂波滤除处理,但是经过模糊话处理的图像目标边缘会变得更加难以识别,不利于对目标进行特征识别,不便于对目标的追踪,同时,难以高效的识别目标在转化后二维图形中的位置,例如专利cn109188430a中,公开了一种基于地面监视雷达系统的目标提取方法,包括:获取雷达前端处理的目标回波信息;对所述目标回波信息进行虚假点迹过滤处理;对虚假点迹过滤处理后的所述目标回波信息进行模糊化处理;对模糊化处理后的所述目标回波信息构成二维图像,并对所述二维图像进行目标边缘化提取;对边缘化提取后得到的属于同一目标的所述目标回波信息进行地物目标滤除处理;得到地物目标滤除处理后属于同一目标的目标回波信息。本发明提高了目标提取的完整性,提高了目标提取的精度,降低了同一个目标在进行目标提取时分裂为多个目标的风险。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一;为此,本发明提出了一种基于地面监视雷达系统的目标提取方法及系统,用于解决经过模糊话处理的图像目标边缘会变得更加难以识别,不利于对目标进行特征识别,不便于对目标的追踪技术问题。
2、为解决上述问题,本发明的第一方面提供了一种基于地面监视雷达系统的目标提取方法,包括以下步骤:
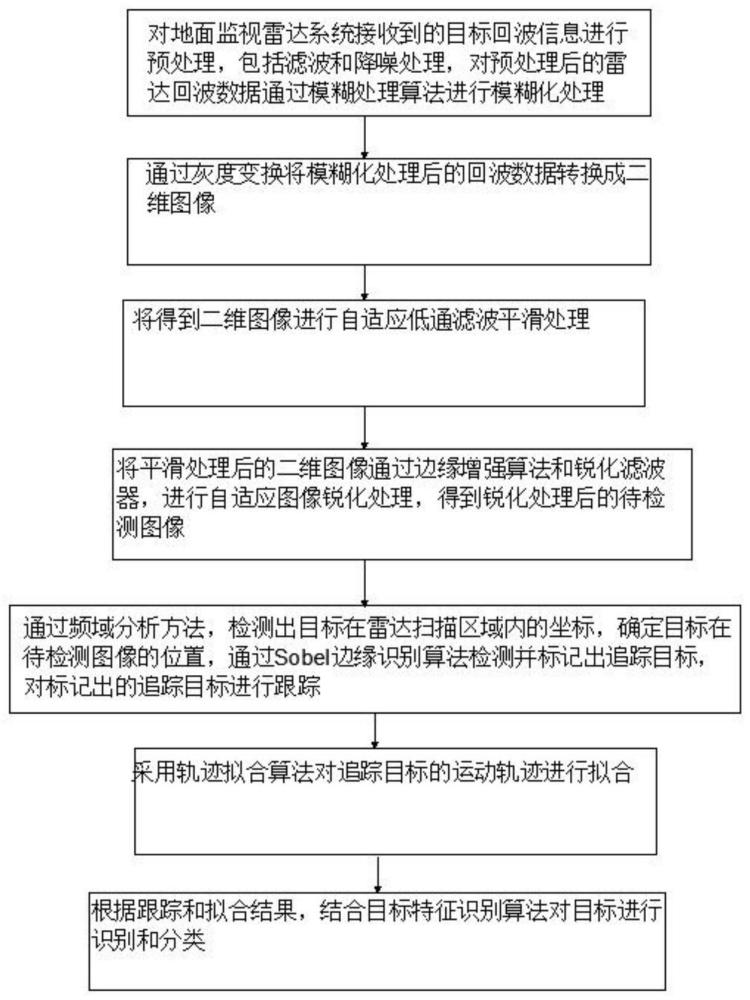
3、对地面监视雷达系统接收到的目标回波信息进行预处理,包括滤波和降噪处理,对预处理后的雷达回波数据通过模糊处理算法进行模糊化处理;
4、通过灰度变换将模糊化处理后的回波数据转换成二维图像;
5、将得到二维图像进行自适应低通滤波平滑处理;
6、将平滑处理后的二维图像通过边缘增强算法和锐化滤波器,进行自适应图像锐化处理,得到锐化处理后的待检测图像;
7、通过频域分析方法,检测出目标在雷达扫描区域内的坐标,确定目标在待检测图像的位置,通过sobe l边缘识别算法检测并标记出追踪目标,对标记出的追踪目标进行跟踪;
8、采用轨迹拟合算法对追踪目标的运动轨迹进行拟合;
9、根据跟踪和拟合结果,结合目标特征识别算法对目标进行识别和分类。
10、作为本发明进一步的方案:通过频域分析方法,检测出目标在雷达扫描区域内的坐标,确定目标在待检测图像的位置,包括以下步骤:
11、获取预处理后的雷达回波数据;
12、将回波信号进行傅立叶变换,将回波信号从时域转换到频域;
13、分析回波信号在频域中的频谱中的特征,包括频率成分、幅度和相位,提取目标的特征信息;
14、根据目标的特征信息在频域中的表现,结合地面监视雷达系统的参数,包括:雷达天线方向图、雷达扫描范围和雷达位置和角度,计算目标在雷达坐标系中的位置;
15、通过外部坐标系标定确定雷达数据和图像数据的对应关系,将雷达坐标系转化为待检测图像中的坐标系,确定目标在待检测图像的位置。
16、作为本发明进一步的方案:根据目标的特征信息在频域中的表现,结合地面监视雷达系统的参数,包括:雷达天线方向图和雷达位置和角度,计算目标在雷达坐标系中的位置,包括以下步骤:
17、根据频谱中的频率成分、幅度和相位特征信息,识别与目标关联的特定频率或频率范围;
18、通过比对目标的特征信息在频域中的表现,将这些特征与目标数据库或特征库中的数据进行匹配,识别目标。
19、根据雷达天线方向图,将目标在天线坐标系中的位置转换为雷达坐标系的位置;
20、根据目标相对雷达的位置信息,结合雷达扫描范围和雷达位置和角度参数,计算目标在雷达坐标系中的具体位置。
21、作为本发明进一步的方案:通过sobe l边缘识别算法检测并标记出追踪目标,对标记出的追踪目标进行跟踪,包括以下步骤:
22、待检测图像数进行粗分类,分为静态图像分组和动态图像分组;
23、通过深度学习算法识别动态图像中的人物目标、动物目标和机动目标;
24、对于静态图像分组目标追踪,在静态图像中,通过基于特征点匹配和边缘检测的方法进行目标追踪;
25、对于动态图像分组目标追踪,在动态图像中,针对人物目标、动物目标和机动目标,通过卡尔曼滤波和深度学习处理目标的快速和复杂运动。
26、作为本发明进一步的方案:待检测图像数进行粗分类,分为静态图像和动态图像,包括以下步骤:
27、获取待检测图像对应的经过预处理后的回波数据,间隔预设的时间段,从经过预处理的回波数据中提取目标在图像中的位置信息;
28、计算间隔预设的时间段提取到的目标在图像中的位置数据的变化长度;
29、若位置数据的变化长度超过预设阈值,则对应的待检测图像为动态图像,反之,则对应的待检测图像为静态图像。
30、作为本发明进一步的方案:对于静态图像分组目标追踪,在静态图像中,通过基于特征点匹配和边缘检测的方法进行目标追踪,包括以下步骤:
31、基于特征点匹配的目标追踪:
32、在静态图像中检测目标区域的特征点,特征点包括角点和边缘点;
33、通过为每个特征点提取s i ft特征点描述符,描述特征点的外观;
34、在后续帧中进行特征点检测和描述后,通过特征点匹配算法将当前帧的特征点与前一帧的特征点的s i ft特征点描述符进行匹配;
35、通过匹配的特征点,通过对极几何算法计算目标的运动数据。
36、基于边缘检测的目标追踪:
37、通过sobe l边缘检测算法检测图像中的边缘信息,得到目标边缘的轮廓;
38、通过比较当前帧中的边缘轮廓和前一帧中的边缘轮廓,找到匹配的边缘轮廓;
39、根据匹配的边缘轮廓,通过对极几何算法计算目标的运动数据。
40、作为本发明进一步的方案:对于动态图像分组目标追踪,在动态图像中,针对人物目标、动物目标和机动目标,通过卡尔曼滤波和深度学习处理目标的快速和复杂运动,包括以下步骤:
41、动态图像通过hog+svm行人检测算法进行人物目标的检测,将符合人物目标的图像分组到人物目标检测分组中;
42、基于haar特征的检测器对动物目标进行检测,将符合动物目标的图像分组到动物目标检测分组中;
43、通过ssd车辆检测模型对机动目标进行检测,将符合机动目标的图像分组到机动目标检测分组中;
44、人物目标检测分组中通过人体特征的描述符,对检测到的人物目标的特征的描述符,对连续动态图像中符合的人物目标进行定位;
45、动物目标检测分组中通过动物特征的描述符,对检测到的动物目标的特征的描述符,对连续动态图像中符合的动物目标进行定位;
46、动物目标检测分组中通过机动特征的描述符,对检测到的机动目标的特征的描述符,对连续动态图像中符合的机动目标进行定位。
47、对每个检测到的目标进行初始化,并分配唯一的id标识;
48、通过sort多目标跟踪算法对目标进行跟踪,在连续帧中追踪目标的轨迹;
49、作为本发明进一步的方案:根据跟踪和拟合结果,结合目标特征识别算法对目标进行识别和分类,包括以下步骤:
50、根据目标跟踪和拟合的结果,通过目标特征识别算法提取目标的特征信息,特征信息包括目标的目标物的尺寸、速度、加速度、运动方向和散射截面特征;
51、获取包含人物目标、动物目标和机动目标的雷达回波的历史数据,以及目标的运动拟合结果,对拟合结果进行标注,标明每个目标的尺寸、速度、加速度、运动方向和散射截面特征;
52、对收集的数据进行数据清洗、特征提取和标准化处理;
53、构建cnn模型,将标注的目标的尺寸、速度、加速度、运动方向和散射截面特征作为模型的输入,输出为人物目标、动物目标或机动目标;
54、将实时的目标跟踪和拟合的结果,以及提取目标的特征信息输入到训练好的cnn模型中进行目标分类,根据模型输出的结果,识别目标为人物目标、动物目标或机动目标。
55、作为本发明另一方面的方案:一种基于地面监视雷达系统的目标提取系统,其特征在于,包括:
56、数据预处理模块:对地面监视雷达系统接收到的目标回波信息进行预处理,包括滤波和降噪处理,对预处理后的雷达回波数据通过模糊处理算法进行模糊化处理;
57、数据转化模块:通过灰度变换将模糊化处理后的回波数据转换成二维图像,并将得到二维图像进行自适应低通滤波平滑处理;
58、锐化滤波模块:将平滑处理后的二维图像通过边缘增强算法和锐化滤波器,进行自适应图像锐化处理,得到锐化处理后的待检测图像;
59、目标检测模块:通过频域分析方法,检测出目标在雷达扫描区域内的坐标,确定目标在待检测图像的位置,通过sobe l边缘识别算法检测并标记出追踪目标,对标记出的追踪目标进行跟踪;
60、目标跟踪与轨迹拟合模块:根据目标在每一帧待检测图像中的历史位置信息,结合运动预测算法,对追踪目标的运动轨迹进行拟合;
61、目标识别与分类模块:根据跟踪和拟合结果,结合目标特征识别算法对目标进行识别和分类。
62、作为本发明进一步的方案:所述目标检测模块,包括:
63、粗分类单元:待检测图像数进行粗分类,分为静态图像分组和动态图像分组,通过深度学习算法识别动态图像中的人物目标、动物目标和机动目标;
64、静态目标追踪单元:对于静态图像分组目标追踪,在静态图像中,通过基于特征点匹配和边缘检测的方法进行目标追踪;
65、动态目标追踪单元:对于动态图像分组目标追踪,在动态图像中,针对人物目标、动物目标和机动目标,通过卡尔曼滤波和深度学习处理目标的快速和复杂运动。
66、与现有技术相比,本发明的有益效果是:
67、本发明通过对回波数据进行模糊处理后转换成二维图像,并进行自适应图像锐化处理,可以提高图像质量、方便特征提取、增加目标区分度、提升识别准确性,减少误判等方面的优点,有助于提升目标识别的效果;模糊处理有助于去除噪声和平滑图像,使得转换后的二维图像更清晰,自适应图像锐化处理可以增强图像边缘和细节,进一步提高图像质量,同时自适应图像锐化处理可以突出图像中的关键特征,有助于提高识别准确率。通过模糊处理和自适应图像锐化处理,优化图像的视觉效果,使得目标更加清晰,有助于提高目标识别的准确性和可靠性,也减少了因噪声或图像模糊导致的误判,提高目标识别的稳定性和准确性。
68、本发明通过sobe l边缘识别算法检测并标记出追踪目标,并对其进行跟踪,具有高效准确的目标检测、稳健性强、目标跟踪精准、实时性强和适用性广泛等优点,可以有效提高目标跟踪系统的性能和稳定性;sobe l算法能够有效识别图像中的边缘特征,将目标与背景明显区分开来,有助于准确地标记出目标的位置;同时,sobe l算法对噪声具有一定的抗干扰能力,在边缘检测过程中不易受到噪声的影响,能够稳定地标记出目标的边缘,有助于提高目标检测的稳定性。标记出的追踪目标提供了目标在图像中的位置信息,有利于进行目标的跟踪。sobe l边缘识别算法可以提供清晰的目标边缘信息,有助于跟踪算法有效地锁定目标并持续跟踪。
- 还没有人留言评论。精彩留言会获得点赞!