一种基于环境自适应的激光测距动态调整方法及系统与流程
本发明涉及激光测距,特别涉及一种基于环境自适应的激光测距动态调整方法及系统。
背景技术:
1、激光测距技术在工业、自动驾驶、机器人等领域中具有广泛的应用,但其测距精度受环境因素的影响较大。传统的激光测距系统通常在固定环境下进行校准,无法适应不同环境条件下的测量需求,导致在复杂环境中的测距精度下降。
2、目前的激光测距调整方法大多基于预先设置的参数或者静态校准模式,难以实时地对环境变化做出响应。因此,需要一种基于环境自适应的动态调整方法,能够根据实时环境条件调整激光测距系统的参数,提高其在不同环境下的测距精度和稳定性。
3、本发明提出了一种基于环境自适应的激光测距动态调整方法及系统,通过实时获取环境激光距离探测数据,并根据其特征计算精度补偿系数,实现了对激光测距系统的动态调整。这种方法可以根据环境的变化实时调整激光测距系统的参数,提高其适应不同环境的能力,从而有效提高了测距的准确性和稳定性,具有重要的技术优势和应用前景。
技术实现思路
1、为了解决上述至少一个技术问题,本发明提出了一种基于环境自适应的激光测距动态调整方法及系统。
2、本发明第一方面提供了一种基于环境自适应的激光测距动态调整方法,包括:
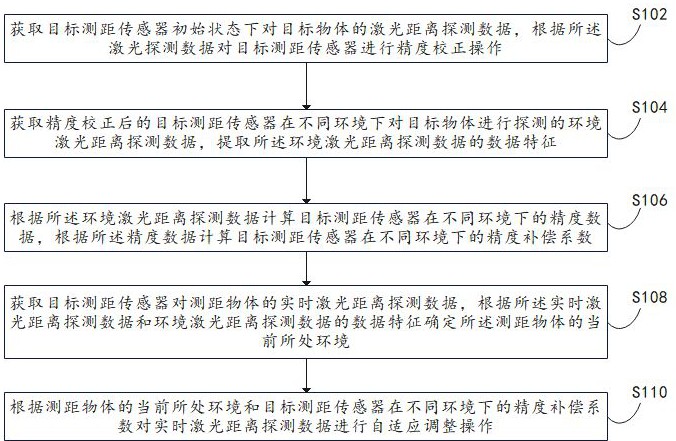
3、获取目标测距传感器初始状态下对目标物体的激光距离探测数据,根据所述激光探测数据对目标测距传感器进行精度校正操作;
4、获取精度校正后的目标测距传感器在不同环境下对目标物体进行探测的环境激光距离探测数据,提取所述环境激光距离探测数据的数据特征;
5、根据所述环境激光距离探测数据计算目标测距传感器在不同环境下的精度数据,根据所述精度数据计算目标测距传感器在不同环境下的精度补偿系数;
6、获取目标测距传感器对测距物体的实时激光距离探测数据,根据所述实时激光距离探测数据和环境激光距离探测数据的数据特征确定所述测距物体的当前所处环境;
7、根据测距物体的当前所处环境和目标测距传感器在不同环境下的精度补偿系数对实时激光距离探测数据进行自适应调整操作。
8、本方案中,所述获取目标测距传感器初始状态下对目标物体的激光距离探测数据,根据所述激光探测数据对目标测距传感器进行精度校正操作,具体为:
9、在预设位置构建等距平面网格图,依次将目标物体放置于所述等距平面网格图中的每个网格中;
10、目标测距传感器通过激光器发射激光信号,发射信号经过发射透镜到达目标物体后,反射信号依次通过目标测距传感器的接收透镜、滤光片、匀光片后到达光感应器,得到目标测距传感器对目标物体在每个网格中进行探测的激光距离探测数据集;
11、根据所述激光距离探测数据集获取目标测距传感器对目标物体在每个网格的探测距离;
12、获取目标物体在每个网格与目标测距传感器的实际距离,将所述探测距离与实际距离进行对比,得到目标物体在每个网格的距离误差数据集;
13、基于bp神经网络构建距离误差预测模型,将所述距离误差数据集根据所在网格距离进行排序操作,形成距离误差序列数据集,将所述距离误差序列数据集作为所述距离误差预测模型的学习样本;
14、预设所述距离误差预测模型的模型参数值,将所述学习样本导入距离误差预测模型中对不同位置的距离误差进行学习,预测目标测距传感器对不同位置的物体的进行测距过程中的距离偏差;
15、根据所述距离偏差对目标测距传感器进行精度校正操作。
16、本方案中,所述获取精度校正后的目标测距传感器在不同环境下对目标物体进行探测的环境激光距离探测数据,提取所述环境激光距离探测数据的数据特征,具体为:
17、获取精度校正操作后的目标测距传感器在不同环境下对目标物体进行探测的环境激光距离探测数据,所述不同环境包括雨天环境、雾天环境、扬尘环境、高温环境;
18、将所述环境激光距离探测数据中的激光反射数据绘制时域信号波形图,将所述时域信号波形图转化为一维时间序列,将所述一维时间序列利用延迟法进行重采样,得到重构矩阵;
19、基于奇异值分解方法对所述重构矩阵进行奇异值分解,得到所述重构矩阵的奇异值;
20、根据所述奇异值提取所述环境激光距离探测数据的数据特征,所述数据特征包括环境噪声特征与激光距离探测信号特征。
21、本方案中,所述根据所述环境激光距离探测数据计算目标测距传感器在不同环境下的精度数据,根据所述精度数据计算目标测距传感器在不同环境下的精度补偿系数,具体为:
22、根据所述环境激光距离探测数据获取在不同环境下目标测距传感器对目标物体的探测距离数据,并获取目标测距传感器在不同环境下与目标物体的实际距离数据;
23、根据所述不同环境下目标测距传感器对目标物体的探测距离数据与目标测距传感器在不同环境下与目标物体的实际距离数据进行对比,确定在不同环境下的探测误差;
24、基于所述在不同环境下的探测误差确定目标测距传感器的精度数据,基于线性回归方法对不同环境下的精度数据进行分析,判断不同环境对目标测距传感器的精度影响程度;
25、根据所述精度影响程度计算目标测距传感器在不同环境下的精度补偿系数。
26、本方案中,所述获取目标测距传感器对测距物体的实时激光距离探测数据,根据所述实时激光距离探测数据和环境激光距离探测数据的数据特征确定所述测距物体的当前所处环境,具体为:
27、按预设数据采集周期获取目标测距传感器对测距物体的实时激光距离探测数据;
28、基于奇异值分解方法对所述实时激光距离探测数据进行特征提取,得到实时探测数据特征;
29、计算实时探测数据特征的环境噪声特征与环境激光距离探测数据的环境噪声特征之间的曼哈顿距离,根据所述曼哈顿距离判断所述环境噪声特征之间的相似度;
30、根据所述相似度确定目标测距传感器对所述测距物体进行测距的当前所处环境。
31、本方案中,所述根据测距物体的当前所处环境和目标测距传感器在不同环境下的精度补偿系数对实时激光距离探测数据进行自适应调整操作,具体为:
32、将不同环境下的精度补偿系数与所对应的环境形成一一映射关系,得到环境-精度补偿系数映射表;
33、根据测距物体的当前所处环境与环境-精度补偿系数映射表确定目标测距传感器对测距物体的当前所处环境的精度补偿系数;
34、根据所述当前所处环境的精度补偿系数对实时激光距离探测数据进行自适应调整操作,所述自适应调整操作包括对实时激光距离探测数据的探测距离精度进行调整,得到自适应调整激光距离探测数据。
35、本发明第二方面还提供了一种基于环境自适应的激光测距动态调整系统,该系统包括:存储器、处理器,所述存储器中包括基于环境自适应的激光测距动态调整方法程序,所述基于环境自适应的激光测距动态调整方法程序被所述处理器执行时,实现如下步骤:
36、获取目标测距传感器初始状态下对目标物体的激光距离探测数据,根据所述激光探测数据对目标测距传感器进行精度校正操作;
37、获取精度校正后的目标测距传感器在不同环境下对目标物体进行探测的环境激光距离探测数据,提取所述环境激光距离探测数据的数据特征;
38、根据所述环境激光距离探测数据计算目标测距传感器在不同环境下的精度数据,根据所述精度数据计算目标测距传感器在不同环境下的精度补偿系数;
39、获取目标测距传感器对测距物体的实时激光距离探测数据,根据所述实时激光距离探测数据和环境激光距离探测数据的数据特征确定所述测距物体的当前所处环境;
40、根据测距物体的当前所处环境和目标测距传感器在不同环境下的精度补偿系数对实时激光距离探测数据进行自适应调整操作。
41、本方案中,所述根据所述环境激光距离探测数据计算目标测距传感器在不同环境下的精度数据,根据所述精度数据计算目标测距传感器在不同环境下的精度补偿系数,具体为:
42、根据所述环境激光距离探测数据获取在不同环境下目标测距传感器对目标物体的探测距离数据,并获取目标测距传感器在不同环境下与目标物体的实际距离数据;
43、根据所述不同环境下目标测距传感器对目标物体的探测距离数据与目标测距传感器在不同环境下与目标物体的实际距离数据进行对比,确定在不同环境下的探测误差;
44、基于所述在不同环境下的探测误差确定目标测距传感器的精度数据,基于线性回归方法对不同环境下的精度数据进行分析,判断不同环境对目标测距传感器的精度影响程度;
45、根据所述精度影响程度计算目标测距传感器在不同环境下的精度补偿系数。
46、本方案中,所述获取目标测距传感器对测距物体的实时激光距离探测数据,根据所述实时激光距离探测数据和环境激光距离探测数据的数据特征确定所述测距物体的当前所处环境,具体为:
47、按预设数据采集周期获取目标测距传感器对测距物体的实时激光距离探测数据;
48、基于奇异值分解方法对所述实时激光距离探测数据进行特征提取,得到实时探测数据特征;
49、计算实时探测数据特征的环境噪声特征与环境激光距离探测数据的环境噪声特征之间的曼哈顿距离,根据所述曼哈顿距离判断所述环境噪声特征之间的相似度;
50、根据所述相似度确定目标测距传感器对所述测距物体进行测距的当前所处环境。
51、本方案中,所述根据测距物体的当前所处环境和目标测距传感器在不同环境下的精度补偿系数对实时激光距离探测数据进行自适应调整操作,具体为:
52、将不同环境下的精度补偿系数与所对应的环境形成一一映射关系,得到环境-精度补偿系数映射表;
53、根据测距物体的当前所处环境与环境-精度补偿系数映射表确定目标测距传感器对测距物体的当前所处环境的精度补偿系数;
54、根据所述当前所处环境的精度补偿系数对实时激光距离探测数据进行自适应调整操作,所述自适应调整操作包括对实时激光距离探测数据的探测距离精度进行调整,得到自适应调整激光距离探测数据。
55、本发明公开了一种基于环境自适应的激光测距动态调整方法及系统,旨在提高激光测距传感器在不同环境下的测距精度。本发明包括以下步骤:首先,获取目标测距传感器初始状态下对目标物体的激光距离探测数据,并进行精度校正操作;其次,获取不同环境下的激光距离探测数据,并提取其数据特征;接着,根据环境激光距离探测数据计算精度补偿系数;然后,获取实时激光距离探测数据,并确定测距物体的当前环境;最后,根据当前环境和精度补偿系数对实时数据进行自适应调整。本发明能够根据环境变化实时调整测距传感器的精度,提高了测距的准确性和稳定性,具有重要的应用价值。
- 还没有人留言评论。精彩留言会获得点赞!