测距数据处理方法、装置和计算机设备与流程
本技术涉及数据处理,特别是涉及一种测距数据处理方法、装置、和计算机设备。
背景技术:
1、激光测距技术是利用激光发射对物体进行距离测定的方法与技术,其原理是利用激光器向待测物体发射激光,通过对待测物体反射回来的反射光信号进行检测,从而得到待测物体与激光器之间的距离。
2、现有的测距技术主要是通过使用窗口较长的滤波算法,来对所测得的距离进行滤波,从而输出待测物体与激光器之间的距离,但是使用窗口较长的滤波算法,只能够保证待测物体在单一运动状态时的精度,对于待测物体在多个不同运动状态中切换的场景,无法做到快速响应。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够兼顾待测物体在不同运动状态下测距的测距数据处理方法、装置、计算机设备和计算机可读存储介质。
2、第一方面,本技术提供了一种测距数据处理方法,所述方法包括:
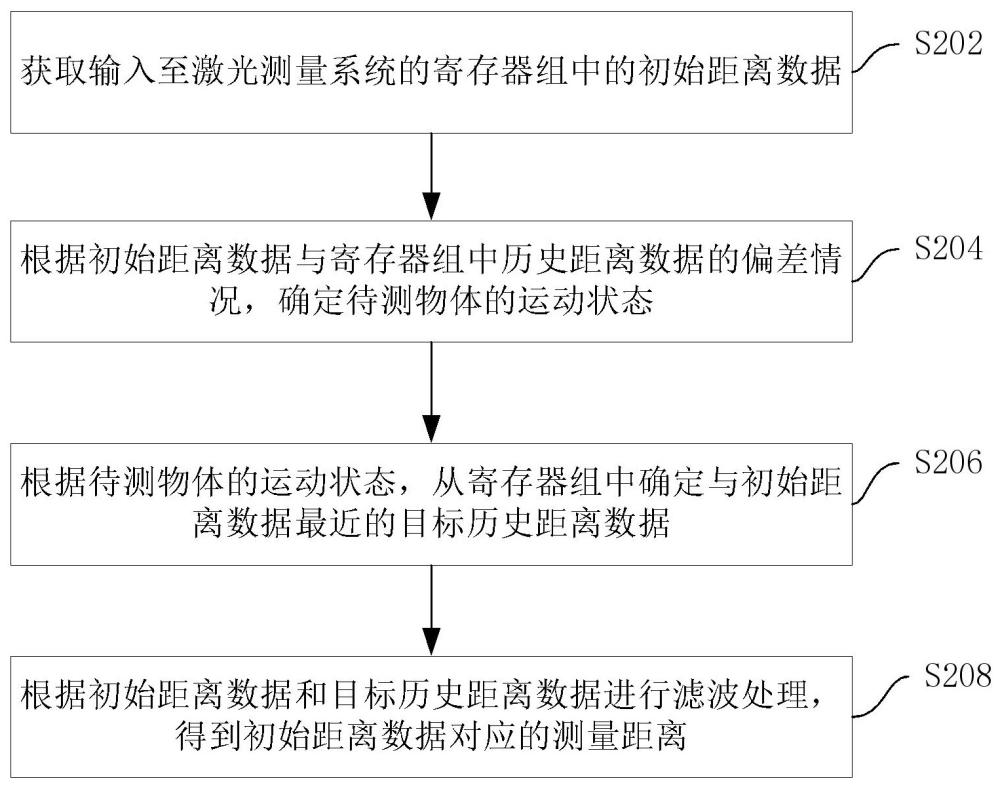
3、获取输入至激光测量系统的寄存器组中的初始距离数据;所述初始距离数据根据反射光信号获得;所述反射光信号为对待测物体发射的激光返回的反射光信号;
4、根据所述初始距离数据与所述寄存器组中历史距离数据的偏差情况,确定所述待测物体的运动状态;所述运动状态包括第一状态和第二状态;
5、根据所述待测物体的运动状态,从所述寄存器组中确定与所述初始距离数据最近的目标历史距离数据;所述第一状态对应的目标历史距离数据的数量,小于所述第二状态对应的目标历史距离数据的数量;
6、根据所述初始距离数据和所述目标历史距离数据进行滤波处理,得到所述初始距离数据对应的测量距离。
7、在其中一个实施例中,所述寄存器组至少包括至少两个寄存器;所述至少两个寄存器中的第一寄存器位于所述寄存器组的头部;
8、所述根据所述初始距离数据与所述寄存器组中历史距离数据的偏差情况,确定所述待测物体的运动状态,包括:
9、将所述第一寄存器中的每一历史距离数据分别与所述初始距离数据进行差值计算,得到每一所述历史距离数据对应的第一差值;
10、确定各所述第一差值中,大于第一阈值的第一数量;
11、基于所述第一数量,确定所述待测物体的运动状态。
12、在其中一个实施例中,所述基于所述第一数量,确定所述待测物体的运动状态,包括:
13、在所述第一数量大于第二阈值的情况下,将所述待测物体的运动状态确定为第一状态;所述第二阈值为所述第一寄存器允许存储的数据总量的一半。
14、在其中一个实施例中,所述根据所述待测物体的运动状态,从所述寄存器组中确定与所述初始距离数据最近的目标历史距离数据,包括:
15、在所述待测物体的运动状态为所述第一状态的情况下,将所述第一寄存器中的每一历史距离数据,确定为所述第一状态对应的目标历史距离数据。
16、在其中一个实施例中,所述基于所述第一数量,确定所述待测物体的运动状态,包括:
17、在所述第一数量小于第二阈值的情况下,将所述待测物体的运动状态确定为第二状态;所述第二阈值为所述第一寄存器允许存储的数据总量的一半。
18、在其中一个实施例中,所述根据所述待测物体的运动状态,从所述寄存器组中确定与所述初始距离数据最近的目标历史距离数据,包括:
19、在所述待测物体的运动状态为所述第二状态的情况下,将所述寄存器组中的每一历史距离数据,均确定为所述第二状态对应的目标历史距离数据。
20、在其中一个实施例中,所述至少两个寄存器还包括第二寄存器;
21、所述在所述待测物体的运动状态为所述第一状态的情况下,将所述第一寄存器中的每一历史距离数据,确定为所述第一状态对应的目标历史距离数据,包括:
22、在所述待测物体的运动状态为所述第一状态的情况下,对所述第二寄存器中的历史距离数据进行清零处理,得到数据更新后的寄存器组;
23、将所述数据更新后的寄存器组中的非零历史距离数据,确定为所述第一状态对应的目标历史距离数据。
24、在其中一个实施例中,所述根据所述初始距离数据和所述目标历史距离数据进行滤波处理,得到所述初始距离数据对应的测量距离,包括:
25、基于所述目标历史距离数据和所述初始距离数据,分别进行均值、方差以及标准差计算,得到均值、方差以及标准差;
26、分别计算所述目标历史距离数据和所述初始距离数据,与所述均值之间差的绝对值,得到多个绝对值;
27、基于所述方差、所述标准差以及各所述绝对值,对所述初始距离数据进行滤波处理,得到所述初始距离数据对应的测量数据。
28、第二方面,本技术提供了一种测距数据处理装置,所述装置包括:
29、数据获取模块,用于获取输入至激光测量系统的寄存器组中的初始距离数据;所述初始距离数据根据反射光信号获得;所述反射光信号为对待测物体发射的激光返回的反射光信号;
30、状态确定模块,用于根据所述初始距离数据与所述寄存器组中历史距离数据的偏差情况,确定所述待测物体的运动状态;所述运动状态包括第一状态和第二状态;
31、数据确定模块,用于根据所述待测物体的运动状态,从所述寄存器组中确定与所述初始距离数据最近的目标历史距离数据;所述第一状态对应的目标历史距离数据的数量,小于所述第二状态对应的目标历史距离数据的数量;
32、数据滤波模块,用于根据所述初始距离数据和所述目标历史距离数据进行滤波处理,得到所述初始距离数据对应的测量距离。
33、第三方面,本技术提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法的步骤。
34、第四方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
35、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的方法的步骤。
36、上述测距数据处理方法、装置、计算机设备、存储介质和计算机程序产品,通过获取输入至激光测量系统寄存组中,根据反射光信号所获得的初始距离数据,可以减少噪音数据对所获得的初始距离数据的干扰,从而确保所获取到的初始距离数据较准确;通过根据初始距离数据与寄存器组中历史距离数据的偏差情况,确定待测物体的运动状态,可以实现对待测物体的不同运动状态的识别,确定待测物体的运动状态是第一状态还是第二状态。进一步在目标历史距离数据的选取时,能够根据当前确定的待测物体的运动状态,对用于进行滤波处理的目标历史距离数据的精确选择。从而通过根据初始距离数据和目标历史距离数据进行滤波处理,提升输出的初始距离数据对应的测量距离的准确性。该方法通过根据待测物体的运动状态,从寄存器组中确定与初始距离数据最近的目标历史距离数据,以输出测量距离,可以同时兼顾待测物体在不同运动状态下的测距方式,以实现待测物体在不同运动状态下互相切换过程中的测距。
- 还没有人留言评论。精彩留言会获得点赞!