无人机激光测量弧垂方法及系统与流程
本发明属于图像处理,具体涉及无人机激光测量弧垂方法及系统。
背景技术:
1、架空输电线路的弧垂是需要特别关注的关键参数。如果弧垂值过小,导线内部可能会承受过大的拉力,从而可能导致导线断裂事故。相反,如果弧垂值过大,导线与下方物体的距离可能不足,从而引发跳闸事故。目前,电力行业最常用的弧垂测量方法是人工使用经纬仪进行测量和计算。然而在视线受阻的情况下难以进行有效的测量,因此,使用搭载激光扫描仪的无人机拍摄并获取输电线路的弧垂信息已成为当前的主流研究趋势。
2、例如专利申请“cn114396878a”公开了一种基于无人机激光点云模型的输电线路弧垂测量方法,该方法利用搭载三维激光点云扫描仪的无人机,对两座杆塔及两座杆塔之间的输电线路进行三维激光扫描,得到相应点云数据;利用点云数据,进行三维重建,得到输电线路模型;最后将输电线路模型导入几何画板进行分析,又例如专利申请“cn114543699a”公开了一种基于无人机高精度三维建模的输电线路弧垂测量方法,该方法首先控制搭载有三维激光扫描仪无人机飞行至待检测区域;利用三维激光扫描仪对两根相邻塔杆及塔杆之间的输电线路进行激光扫描,并建立三维模型;以三维模型建立三维坐标系,在三维坐标系上标注三个观测点,将三维坐标系转化为平面坐标系,在三维坐标系中的三个观测点对应到二维坐标系中的坐标分别为第一挂点、第二挂点以及第三任意点,通过三个坐标值求解弧垂值。
3、然而,上述两种方法均需要通过人工手动标注计算点,因此其自动化程度还有待提高。
技术实现思路
1、为解决上述问题,本发明提供了无人机激光测量弧垂方法及系统,以解决现有技术中在生成输电线路的点云数据后、还需要通过人工操作才能计算弧垂的问题。
2、为了达到上述的发明目的,本发明提出无人机激光测量弧垂方法,包括:
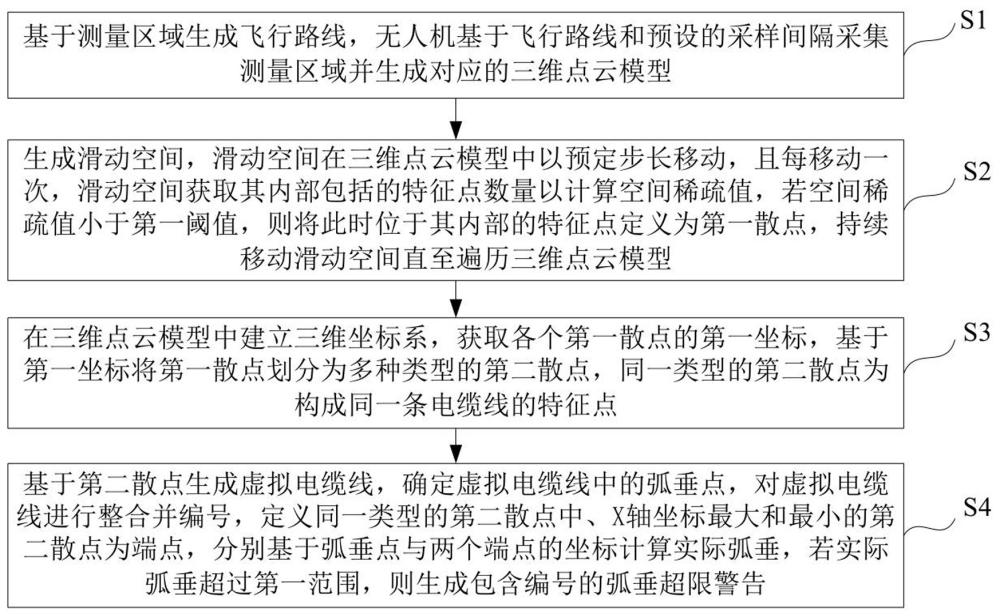
3、步骤s1:基于测量区域生成飞行路线,无人机基于所述飞行路线和预设的采样间隔采集所述测量区域并生成对应的三维点云模型;
4、步骤s2:生成滑动空间,所述滑动空间在所述三维点云模型中以预定步长移动,且每移动一次,所述滑动空间获取其内部包括的特征点数量以计算空间稀疏值,若所述空间稀疏值小于第一阈值,则将此时位于其内部的所述特征点定义为第一散点,持续移动所述滑动空间直至遍历所述三维点云模型;
5、步骤s3:在所述三维点云模型中建立三维坐标系,获取各个所述第一散点的第一坐标,基于所述第一坐标将所述第一散点划分为多种类型的第二散点,同一类型的所述第二散点为构成同一条电缆线的所述特征点;
6、步骤s4:基于所述第二散点生成虚拟电缆线,确定所述虚拟电缆线中的弧垂点,对所述虚拟电缆线进行整合并编号,定义同一类型的所述第二散点中、x轴坐标最大和最小的所述第二散点为端点,分别基于所述弧垂点与两个所述端点的坐标计算实际弧垂,若所述实际弧垂超过第一范围,则生成包含所述编号的弧垂超限警告。
7、进一步的,步骤s3中,基于以下步骤对所述第一散点进行划分:
8、步骤s31:选取其中一个所述第一散点定义为待处理点,获取与所述待处理点对应的第一辅助点和第二辅助点,所述第一辅助点为距离所述待处理点小于第一检测半径的所述第一散点,所述第二辅助点为除所述待处理点以外、距离所述第一辅助点小于第二检测半径的所述第一散点,将其中对应所述第二辅助点数量小于预设数量的所述第一辅助点删除;
9、步骤s32:获取所述第一辅助点与所述第二辅助点x轴和y轴坐标并定义为第二坐标,计算模型获取所述第一辅助点与所述第二辅助点的所述第二坐标并输出相关系数,若所述相关系数大于第一阈值,则将所述第一辅助点与自身最近的所述第二辅助点连接,获得第一连接线,将所述待处理点与所述第一辅助点连接,获得第二连接线,计算所述第一连接线与所述第二连接线的第一夹角,若所述第一夹角小于第二阈值,则判定所述待处理点和所述第一辅助点为同一类型的所述第二散点;
10、步骤s33:在所述第一散点中剔除已经被判定为所述第二散点的所述特征点,继续执行步骤s31至步骤s32,以对剩余的所述第一散点进行判定。
11、进一步的,基于所述第二散点生成虚拟电缆线包括以下步骤:
12、保留判定过程中绘制的所述第二连接线,以其中一个所述端点为起始,将所述第二连接线朝向另一侧的所述端点依次合并,且合并过程中,若未合并所述第二连接线与已合并生成的所述虚拟电缆线在水平面的第二夹角大于所述第二阈值,则跳过该所述第二连接线的合并,重复本步骤,直至将所述第二连接线合并至电缆线的另一个所述端点。
13、进一步的,步骤s4中,基于以下步骤对所述虚拟电缆线进行整合并编号:
14、在生成所有所述虚拟电缆线后,定位其中的中断电缆线,所述中断电缆线为没有与塔杆连接的所述虚拟电缆线,获取与所述中断电缆线距离最近的所述虚拟电缆线,定义为主电缆,获取所述主电缆中与所述中断电缆线距离最近的所述第二散点,定义为第三散点,若所述第三散点的所述第二检测半径内不存在其它所述中断电缆线,将所述中断电缆线延伸至与所述主电缆相交,并赋予所述中断电缆与所述主电缆相同的所述编号;
15、若所述第三散点的所述第二检测半径内存在其它所述中断电缆线,则计算两条所述中断电缆线朝向所述主电缆方向所述端点z轴坐标的第一差值,以及所述中断电缆线朝向所述主电缆方向所述端点与所述第三散点z轴坐标的第二差值,若所述第一差值在第二范围内,所述第二差值不在所述第二范围内,则将两条所述中断电缆线连接并赋予同一所述编号,所述主电缆赋予另一个所述编号。
16、进一步的,步骤s4中,基于以下步骤确定所述弧垂点;
17、将同一电缆两端的所述端点连接获得第一虚拟线,定位所述第一虚拟线的中心并绘制垂直于地面方向的垂线,获取位于所述垂线两侧且距离最近的第二虚拟线,所述第二虚拟线由相邻所述第二散点连接而成,将两条所述第二虚拟线朝向所述垂线延伸至在竖向平面内出现交点,将所述交点设置为所述弧垂点。
18、本发明还提供了一种无人机激光测量弧垂系统,该系统用于实现上述所述的无人机激光测量弧垂方法,该系统包括:
19、控制模块,用于生成飞行路线,并控制无人机基于所述飞行路线和预设的采样间隔采集所述测量区域并生成对应的三维点云模型;
20、第一分类模块,用于生成滑动空间,所述滑动空间在所述三维点云模型中以预定步长移动,且每移动一次,所述滑动空间获取其内部包括的特征点数量以计算空间稀疏值,若所述空间稀疏值小于第一阈值,则将此时位于其内部的所述特征点定义为第一散点,持续移动所述滑动空间直至遍历所述三维点云模型;
21、第二分类模块,在所述三维点云模型中建立三维坐标系,获取各个所述第一散点的第一坐标,基于所述第一坐标将所述第一散点划分为多种类型的第二散点,同一类型的所述第二散点为构成同一条电缆线的所述特征点;
22、弧垂计算模块,基于所述第二散点生成虚拟电缆线,确定所述虚拟电缆线中的弧垂点,对所述虚拟电缆线进行整合并编号,定义同一类型的所述第二散点中、x轴坐标最大和最小的所述第二散点为端点,分别基于所述弧垂点与两个所述端点的坐标计算实际弧垂,若所述实际弧垂超过第一范围,则生成包含所述编号的弧垂超限警告。
23、与现有技术相比,本发明的有益效果如下所述:
24、本发明首先通过无人机测量并生成塔杆和电缆线的三维点云模型,之后为实现针对电缆弧垂的自动计算,在三维点云模型中设置滑动空间,通过滑动空间不断移动计算不同位置的空间稀疏值,从而确定组成三维点云模型的特征点中,哪些用于构成塔杆,哪些用于电缆线,构成电缆线的特征点即为第一散点;在确定完成后,通过建立坐标系再将第一散点进行区分,从而获得构成同一电缆线的第二散点;为避免无人机在扫描过程中遗漏电缆线的最低点,本发明还构建虚拟的弧垂点,最后,通过弧垂点和电缆线端点的坐标计算实际弧垂,并与第一范围进行比较,从而实现对弧垂的自动计算,以及弧垂超限后的自动报警。
- 还没有人留言评论。精彩留言会获得点赞!