一种无人机集群控制的地面工作站系统及其控制方法与流程
[0001]
本发明属于无人机技术领域,具体涉及无人机集群控制的地面工作站系统及其控制方法。
背景技术:
[0002]
无人机作为一种新兴科技产品,能够实现航拍等功能,无人机通过地面的控制器进行控制,为了方便同时对多组无人机进行集群控制,就需要设计一种无人机集群控制的地面工作站系统,以同时控制多组无人机协同进行数据采集等工作。
[0003]
现有的系统存在着不能同时与多组无人机进行稳定的控制连接,且数据吞吐量过大会导致部分图像数据信息丢失的问题。
[0004]
因此针对这一现状,迫切需要设计和生产一种无人机集群控制的地面工作站系统,以满足实际使用的需要。
技术实现要素:
[0005]
本发明的目的在于提供一种无人机集群控制的地面工作站系统,以解决上述背景技术中提出的问题。
[0006]
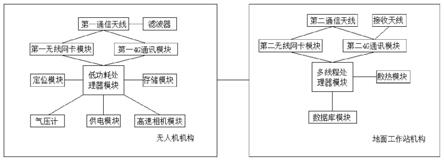
为实现上述目的,本发明提供如下技术方案:一种无人机集群控制的地面工作站系统,包括无人机机构和地面工作站机构,所述无人机机构包括低功耗处理器模块、存储模块和供电模块,所述供电模块和低功耗处理器模块电性连接,所述低功耗处理器模块分别电性连接有气压计、定位模块、存储模块、高速相机模块、第一无线网卡模块和第一4g通讯模块,所述第一无线网卡模块和第一4g通讯模块均电性连接有第一通信天线,所述第一通信天线电性连接有滤波器;
[0007]
所述地面工作站机构包括第二通信天线和多线程处理器模块,所述多线程处理器模块电性连接有第二无线网卡模块和第二4g通讯模块,所述第二无线网卡模块和第二4g通讯模块均电性连接有第二通信天线,所述第二4g通讯模块电性连接有接收天线。
[0008]
优选的,所述存储模块包括内存卡插槽和防水壳,所述内存卡插槽内插接有存储卡,所述内存卡插槽的外侧套接有防水壳。
[0009]
优选的,所述供电模块为18650型锂电池。
[0010]
优选的,所述气压计为bmp180型气压计。
[0011]
优选的,所述第一4g通讯模块和第二4g通讯模块内均嵌套有4g物联卡。
[0012]
优选的,所述高速相机模块为sj5000x型高清运动相机。
[0013]
优选的,所述第一通信天线、第二通信天线和接收天线的工作频率均在5ghz频段。
[0014]
优选的,所述多线程处理器模块为四核心八线程64位处理器。
[0015]
优选的,所述多线程处理器模块电性连接有散热模块,且散热模块位于第二4g通讯模块的一侧。
[0016]
一种无人机集群控制的地面工作站系统的控制方法,具体步骤如下:
[0017]
s1、建立连接:供电模块为低功耗处理器模块供电,低功耗处理器模块启动所连的所有模块工作,通过第一无线网卡模块和第一4g通讯模块经第一通信天线发送请求建立连接的报文信息,该报文信息包含低功耗处理器模块的mac信息,该报文信息分别被第二通信天线和接收天线接收并发送到多线程处理器模块接收,多线程处理器模块接收到报文信息后将mac信息存储到数据库模块中,然后将第一无线网卡模块和第二无线网卡模块建立连接,以及将第一4g通讯模块和第二4g通讯模块建立连接;
[0018]
s2、数据采集:气压计、定位模块和高速相机模块分别同时进行数据采集,气压计采集的海拔数据存储到存储模块中;
[0019]
s3、数据发送和接收:定位模块采集的位置信息通过低功耗处理器模块转化为数字信息并分别通过第一无线网卡模块和第一4g通讯模块发送,当第一无线网卡模块由于距离过远断开连接时,信息仍能经第一4g通讯模块、第一通信天线、第二通信天线和第二4g通讯模块的路径进行发送与接收,高速相机模块采集的图像信息通过第一4g通讯模块发送,并采用专门的接收天线进行接收;
[0020]
s4、路径控制:多线程处理器模块将接收到的来源于不同组无人机机构的数据分配给不同线程,从数据库模块调出预定的不同组的无人机飞行路径所经过的多组坐标信息和对应的mac信息转化为数字信息并通过第二无线网卡模块和第二4g通讯模块经第二通信天线发送,其中mac信息位于数字信息的头部,低功耗处理器模块通过第一通信天线接收到数字信息后先读出位于头部的mac信息,当mac信息为本低功耗处理器模块的mac信息时才读取剩余数据信息,并从存储模块中读取当前所处地理区域的数字地图信息,结合飞行路径所经过的多组坐标信息驱使本无人机机构的飞行方向,低功耗处理器模块同时比对当前气压计采集的海拔数据与存储模块中存放的前一个时间段的海拔数据,若不同则根据海拔高度差调整无人机机构飞行高度;
[0021]
s5、数据整理:多线程处理器模块将接收天线接收到的图像数据存储到数据库模块中并与相应的无人机机构对应的mac信息和飞行路径所经过的多组坐标信息进行对应,然后分类进行存储。
[0022]
本发明的技术效果和优点:该无人机集群控制的地面工作站系统,通过第一无线网卡模块和第二无线网卡模块建立连接、第一4g通讯模块和第二4g通讯模块建立连接的双重连接方式能够同时实现对多组无人机稳定的控制连接,通过气压计来实现飞行高度的校准,且存储模块内存储数字地图可以大量节约数据发送量,避免数据吞吐量过大发生拥堵,图像信息经专门的接收天线进行接收,同样可以避免发生拥堵,确保图像信息不会发生丢失;该无人机集群控制的地面工作站系统,能够同时与多组无人机进行稳定的控制连接,且图像数据信息不会发生丢失。
附图说明
[0023]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0024]
图1为本发明的无人机集群控制的地面工作站系统原理框图;
[0025]
图2为本发明的无人机集群控制的地面工作站系统的控制方法步骤流程图。
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0027]
除非单独定义指出的方向外,本文涉及的上、下、左、右、前、后、内和外等方向均是以本发明所示的图中的上、下、左、右、前、后、内和外等方向为准,在此一并说明。
[0028]
图1示出了本发明实施例的无人机集群控制的地面工作站系统原理框图,包括无人机机构和地面工作站机构,所述无人机机构包括低功耗处理器模块、存储模块和供电模块,所述供电模块和低功耗处理器模块电性连接,所述低功耗处理器模块分别电性连接有气压计、定位模块、存储模块、高速相机模块、第一无线网卡模块和第一4g通讯模块,所述第一无线网卡模块和第一4g通讯模块均电性连接有第一通信天线,所述第一通信天线电性连接有滤波器;
[0029]
所述地面工作站机构包括第二通信天线和多线程处理器模块,所述多线程处理器模块电性连接有第二无线网卡模块和第二4g通讯模块,所述第二无线网卡模块和第二4g通讯模块均电性连接有第二通信天线,所述第二4g通讯模块电性连接有接收天线。
[0030]
具体的,所述存储模块包括内存卡插槽和防水壳,所述内存卡插槽内插接有存储卡,所述内存卡插槽的外侧套接有防水壳,内存卡便于进行更换和容量升级。
[0031]
具体的,所述供电模块为18650型锂电池,能够稳定供电,且重量轻,对飞行影响小。
[0032]
具体的,所述气压计为bmp180型气压计,能够采用现有的海拔检测原理测得海拔信息,且体积较小。
[0033]
具体的,所述第一4g通讯模块和第二4g通讯模块内均嵌套有4g物联卡,数据流量成本更低。
[0034]
具体的,所述高速相机模块为sj5000x型高清运动相机,能够实现高速拍照和清晰的录像。
[0035]
具体的,所述第一通信天线、第二通信天线和接收天线的工作频率均在5ghz频段,避免常用的2.4ghz频段干扰导致断连。
[0036]
具体的,所述多线程处理器模块为四核心八线程64位处理器,进行多线程数据处理能力强。
[0037]
具体的,所述多线程处理器模块电性连接有散热模块,且散热模块位于第二4g通讯模块的一侧,为因接收大量数据而发热严重的第二4g通讯模块提供散热,避免损坏。
[0038]
图2示出了本发明实施例的无人机集群控制的地面工作站系统的控制方法步骤流程图,具体步骤如下:
[0039]
s1、建立连接:将地面工作站机构与外部电源连接,供电模块为低功耗处理器模块供电,低功耗处理器模块采用现有的电路控制原理控制其他元器件,低功耗处理器模块启动所连的所有模块工作,通过第一无线网卡模块和第一4g通讯模块经第一通信天线发送请
求建立连接的报文信息,该报文信息包含低功耗处理器模块的mac信息,该报文信息分别被第二通信天线和接收天线接收并发送到多线程处理器模块接收,多线程处理器模块接收到报文信息后将mac信息存储到数据库模块中,然后将第一无线网卡模块和第二无线网卡模块建立连接,以及将第一4g通讯模块和第二4g通讯模块建立连接;
[0040]
s2、数据采集:气压计、定位模块和高速相机模块分别同时进行数据采集,气压计采集的海拔数据存储到存储模块中;
[0041]
s3、数据发送和接收:定位模块采集的位置信息通过低功耗处理器模块转化为数字信息并分别通过第一无线网卡模块和第一4g通讯模块发送,当第一无线网卡模块由于距离过远断开连接时,信息仍能经第一4g通讯模块、第一通信天线、第二通信天线和第二4g通讯模块的路径进行发送与接收,高速相机模块采集的图像信息通过第一4g通讯模块发送,并采用专门的接收天线进行接收;
[0042]
s4、路径控制:多线程处理器模块将接收到的来源于不同组无人机机构的数据分配给不同线程,从数据库模块调出预定的不同组的无人机飞行路径所经过的多组坐标信息和对应的mac信息转化为数字信息并通过第二无线网卡模块和第二4g通讯模块经第二通信天线发送,其中mac信息位于数字信息的头部,低功耗处理器模块通过第一通信天线接收到数字信息后先读出位于头部的mac信息,当mac信息为本低功耗处理器模块的mac信息时才读取剩余数据信息,低功耗处理器模块省电但是处理能力不够强,避免低功耗处理器模块处理信息过多发生拥堵,并从存储模块中读取当前所处地理区域的数字地图信息,结合飞行路径所经过的多组坐标信息驱使本无人机机构的飞行方向,低功耗处理器模块同时比对当前气压计采集的海拔数据与存储模块中存放的前一个时间段的海拔数据,若不同则根据海拔高度差调整无人机机构飞行高度;
[0043]
s5、数据整理:多线程处理器模块将接收天线接收到的图像数据存储到数据库模块中并与相应的无人机机构对应的mac信息和飞行路径所经过的多组坐标信息进行对应,通过第一无线网卡模块和第一4g通讯模块同时发送来的数据会发生重复,将重复信息删除后分类进行存储。
[0044]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1