一种实现远程诊断并控制车辆的方法及系统与流程
[0001]
本发明涉及远程车互联网技术领域,尤其涉及一种实现远程诊断并控制车辆的方法及系统。
背景技术:
[0002]
现有的车载系统上通过安装车载终端(tbox)从而与远程车联网服务器实现车辆信息的交互,包括车辆实时运行数据的上传与服务器控制车辆命令的下发。现有的车载终端(tbox)使用的网络包括2g(gsm)、3g(cdma)、4g(td-lte和fdd-lte)。车载终端(tbox)按照一定的时间间隔向远程车联网服务器发送数据,在服务器上进行相关数据的处理,若发现车辆异常,如轨迹与预定行驶路线有较大区别、电池电量几乎耗尽、电机数据异常的情况时,可以向车载终端(tbox)下发紧急停车、限速等相关命令,车载终端(tbox)向车身can总线发送符合其can协议等报文,实现车辆的控制。
[0003]
然而,当需要通过车载终端(tbox)实现车载终端(tbox)与云端车联网服务器进行通信时,现有的通信方法会带来极大的延迟,尤其是当网络出现拥堵的时候,可能出现信息无法传输的情况,造成控制命令延迟,甚至是丢失的情况,导致无法实现车辆的控制,即实时性不强。车载终端(tbox)采集的车身实时数据在网络拥堵的时候也有可能无法发送至云端服务器,导致云端服务器没有相应的实时数据进行计算与逻辑判断。
[0004]
因此,需要寻找一种能够实时远程诊断并控制车辆的方法。
技术实现要素:
[0005]
为解决现有技术所存在的技术问题,本发明提供一种实现远程诊断并控制车辆的方法,通过使用无线传输方式进行路边通信设备rsu与车载终端obu的数据交互,实现远程车辆的诊断与实时控制,提高通信的稳定性和实时性。
[0006]
另一方面,本发明还提供一种实现远程诊断并控制车辆的系统。
[0007]
本发明采用以下技术方案来实现:一种实现远程诊断并控制车辆的方法,包括以下步骤:
[0008]
包括以下步骤:
[0009]
s1、车载终端obu通过车身can总线获取车上各零部件实时运行数据,通过车载终端obu内置定位模块获取当前位置数据;
[0010]
s2、车载终端obu通过无线传输方式,将获取的数据发送给路边通信设备rsu;
[0011]
s3、路边通信设备rsu收到车载终端obu发送的数据后进行数据解析,并将数据通过有线网络上传至指定服务器上;
[0012]
s4、服务器对接收到的数据进行运算,判断数据是否存在异常,若存在异常,则进入步骤s5,否则进入步骤s6;
[0013]
s5、服务器下发命令至路边通信设备rsu,路边通信设备rsu将接收到的命令发送给车载终端obu,车载终端obu通过车身can总线发送控制命令;
[0014]
s6、服务器反馈无异常数据给路边通信设备rsu,路边通信设备rsu反馈无异常数据给车载终端obu。
[0015]
本发明系统采用以下技术方案来实现:一种实现远程诊断并控制车辆的系统,包括车载终端obu、路边通信设备rsu及服务器,车载终端obu上设有定位模块、数据获取模块和数据发送模块,路边通信设备rsu上设有数据中转模块,服务器上设有数据异常判断模块和控制模块;其中:
[0016]
数据获取模块通过车身can总线获取车上各零部件实时运行数据,通过定位模块获取当前位置数据;数据发送模块通过无线传输方式,将获取的数据发送给路边通信设备rsu;
[0017]
数据中转模块收到车载终端obu发送的数据后进行数据解析,并将数据上传至服务器上;
[0018]
数据异常判断模块对接收到的数据进行运算,判断数据是否存在异常;控制模块下发控制命令至路边通信设备rsu,路边通信设备rsu上的数据中转模块将接收到的控制命令发送给车载终端obu,车载终端obu通过车身can总线发送控制命令,完成对车辆的控制。
[0019]
本发明与现有技术相比,具有如下优点和有益效果:
[0020]
1、本发明通过车载终端obu获取车上各零部件实时运行数据,利用无线传输方式,将获取的数据发送给路边通信设备rsu,路边通信设备rsu将数据上传至服务器,服务器再对数据进行运算判断,将结果反馈给路边通信设备rsu,从而实现车辆实时的远程诊断与控制。
[0021]
2、本发明使用lte-v2x(lte vehicle to everything)、802.11p等无线传输方式,缩短了车载终端obu与路边通信设备rsu进行通信的延时,通信延时小于使用普通4g方式(td-lte和fdd-lte)实现车载终端与基站的延时,通信稳定性也得到了提高。
附图说明
[0022]
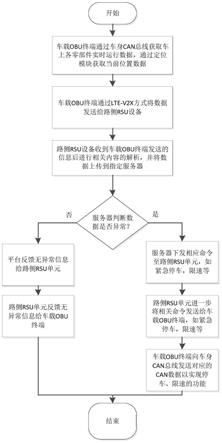
图1是本发明一个实施例中的方法流程图;
[0023]
图2是本发明一个实施例中的系统方框图。
具体实施方式
[0024]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0025]
实施例
[0026]
如图1所示,本实施例基于lte-v2x的整体方案构架中,包括路边通信设备rsu和车载终端obu。其中,路边通信设备rsu不会移动,通过有线网接入主干网络,实现与远程车联网服务器的数据交互。本实施例基于lte-v2x的远程诊断并控制车辆的方法,包括以下步骤:
[0027]
s1、车载终端obu通过车身can总线获取车上各零部件实时运行数据,通过车载终端obu内置定位模块获取当前位置数据。
[0028]
本实施例中,车上各零部件的数据,如车速、发动机转速、剩余里程等,发送至can总线上,车载终端obu带有can总线收发器,用于获取can总线原始数据,并通过现有的can总
线通信协议,如iso15031、iso27145,或基于sae j1939的通信协议,以解析can总线原始数据,获取各零部件当前的工作状态。另外,定位模块的定位方式包括gps/beidou/glonass/galileo、基站辅助定位、陀螺仪惯导定位等,定位精度达到分米级别。
[0029]
s2、车载终端obu通过lte-v2x无线传输方式,将获取的数据发送给路边通信设备rsu。
[0030]
s3、路边通信设备rsu收到车载终端obu发送的数据后,先读取车辆id(车架号或者车牌号),然后通过有线网络将数据进一步上传至相应远程服务器上。按现有的v2x通信技术,在空旷的区域,每个路边通信设备rsu的覆盖范围为1000米左右,因此要实现所有地区覆盖,每1000米范围内就需要一个路边通信设备rsu。路边通信设备rsu一般沿公路边布局,公路上面是开阔的,因此每1000米一个设备,然后十字路口,拐弯处等部署一个即可满足要求。为保障通信质量,每个路边通信设备rsu应只获取其1000米范围内车辆的数据,超出此范围内车辆的数据由另外的路边通信设备rsu获取。
[0031]
本实施例中,车载终端obu和远程服务器遵循共同的通信协议,这个通信协议可以基于gb\t 31024.3进行扩展,同时远程服务器可以基于这个通信协议对报文进行解析,得到报文中所包含的数据,如车速、发送机转速、剩余里程等。
[0032]
s4、远程服务器对接收到的数据进行处理,判断数据是否存在电池电量耗尽的风险等异常信息,若存在异常信息,则进入步骤s5,否则进入步骤s6。使用者可根据具体每个车型配置的不同,在远程服务器上面设置一个报警阈值。如果某个路边通信设备rsu上传的车辆数据超出了报警阈值范围,则认为该车辆存在异常情况。
[0033]
s5、服务器下发相应命令至路边通信设备rsu,如紧急停车、限速等,路边通信设备rsu进一步将相关命令发送给车载终端obu,车载终端obu按照指定的can总线协议,通过车身can总线发送对应的can数据,从而向整车控制器、电机控制器等零部件发送紧急停车、限速等控制命令。
[0034]
s6、服务器反馈无异常信息给路边通信设备rsu,路边通信设备rsu反馈无异常信息给车载终端obu。
[0035]
相应地,本发明的远程诊断并控制车辆的系统,包括车载终端obu、路边通信设备rsu及服务器,车载终端obu上设有定位模块、数据获取模块和数据发送模块,路边通信设备rsu上设有数据中转模块,服务器上设有数据异常判断模块和控制模块;其中:
[0036]
数据获取模块通过车身can总线获取车上各零部件实时运行数据,通过定位模块获取当前位置数据;数据发送模块通过lte-v2x无线传输方式,将获取的数据发送给路边通信设备rsu;
[0037]
数据中转模块收到车载终端obu发送的数据后进行数据解析,并将数据上传至服务器上;
[0038]
数据异常判断模块对接收到的数据进行运算,判断数据是否存在异常;控制模块下发控制命令至路边通信设备rsu,路边通信设备rsu上的数据中转模块将接收到的控制命令发送给车载终端obu,车载终端obu通过车身can总线发送控制命令,完成对车辆的控制。
[0039]
其中,数据接收模块设有车载终端obu和服务器遵循共同的通信协议,通信协议基于gb\t 31024.3进行扩展,同时服务器基于共同的通信协议对报文进行解析,获取报文中所包含的车速、发送机转速、剩余里程数据。
[0040]
本实施例中,可以用802.11p通信方式代替lte-v2x通信方式进行路边通信设备rsu与车载终端obu的数据交互。
[0041]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1