一种双足机器人步态稳定控制方法与流程
1.本发明涉及一种双足机器人步态稳定控制方法。
背景技术:
2.双足机器人与传统轮式机器人相比有更好的可移动性。双足行走是步行方式中自动化程度最高,最为复杂的动态系统。随着科学技术的进步,双足机器人获得了快速发展并在多个领域被广泛应用。目前大多数建筑和工具是依照人的身高和形体设计的,因此双足机器人作为一种机器人平台具有更好的使用灵活性。同时,双足机器人步态的稳定性控制是机器人顺畅行走的前提和基础。步态是指在站立或步行过程中,各个关节在时间和空间上的一种相互关系,可以由关节的运动轨迹来描述。
3.现有的双足机器人步态的稳定性研究都是基于零力矩点(zeromomentpoint,zmp)的方法,建立双足机器人的数学模型,并根据zmp必须落在稳定区域,比如机器人足部的脚掌范围,去推导控制法则。然而,由于路况等因素很可能导致机器人行走失败,甚至出现双足机器人摔倒的现象。这种现象对于多个双足机器人协作时是致命的灾难。
技术实现要素:
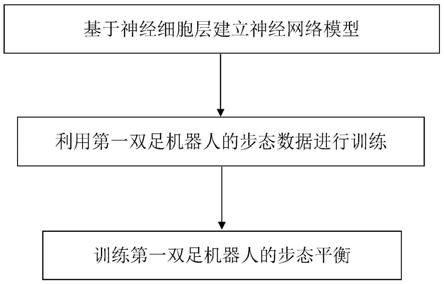
4.为了提升双足机器人在协作状态下的稳定性控制效果,本发明提供了一种双足机器人步态稳定控制方法,包括:基于神经细胞层建立神经网络模型、利用步态测量装置获得的第一双足机器人的步态数据进行训练,以及训练第一双足机器人的步态平衡。
5.进一步地,所述机器人的双足、踝关节和膝关节均为三自由度。
6.进一步地,所述步态数据包括角速度和加速度,所述角速度和加速度为前进方向的角速度和加速度。
7.进一步地,所述步态测量装置包括陀螺仪和加速度计。
8.进一步地,对步态数据的训练包括:
9.获得路面信息数据,其中,该路面信息数据至少包括电子地图中与当前位置有连通关系的路线信息以及经验数据;
10.获得步态数据,基于所述步态数据对预先构建的所述神经网络模型进行训练,得到一级训练模型:
[0011][0012][0013]
其中p和q表示在1至10之间随机选取的一个正整数,且当以上两式角标无对应物理意义时取0;
[0014]
利用一级训练模型对经验数据进行深度学习,学习结果用于进行霍普菲尔网络训练,得到二级训练模型。
[0015]
进一步地,训练步态平衡包括:
[0016]
获得至少一个第二双足机器人的步态数据;
[0017]
利用第一双足机器人的二级训练模型对每个第二双足机器人的步态数据进行深度学习,将学习结果汇总,汇总后的学习结果用于进行稀疏自编码机训练,得到三级训练模型。
[0018]
进一步地,所述一级训练模型是利用蒙特卡洛搜索树优化算法中的随机选取方式进行选取的。
[0019]
进一步地,所述经验数据为来自第一双足机器人或第二双足机器人以往通过与所述路线信息相似度最大的路线时的步态数据。
[0020]
本发明的有益效果在于:双足机器人不仅能够基于自身或其他双足机器人的经验数据提升步态控制模型的训练深度,而且能够与其他双足机器人有效合作,实现共同搬运同一货物、快速适应新环境以便于给予更重要任务以足够的运行时等效果。
附图说明
[0021]
图1示出了本方法的流程框图。
具体实施方式
[0022]
一种双足机器人步态稳定控制方法,包括:
[0023]
基于神经细胞层建立神经网络模型、利用步态测量装置获得的第一双足机器人的步态数据进行训练,以及训练第一双足机器人的步态平衡。
[0024]
优选地,所述机器人的双足、踝关节和膝关节均为三自由度。
[0025]
优选地,所述步态数据包括角速度和加速度,所述角速度和加速度为前进方向的角速度和加速度。
[0026]
优选地,所述步态测量装置包括陀螺仪和加速度计。
[0027]
优选地,对步态数据的训练包括:
[0028]
获得路面信息数据,其中,该路面信息数据至少包括电子地图中与当前位置有连通关系的路线信息以及经验数据;
[0029]
获得步态数据,基于所述步态数据对预先构建的所述神经网络模型进行训练,得到一级训练模型:
[0030][0031][0032]
其中i表示自由度,取值为1、2或3;p和q表示在1至10之间随机选取的一个正整数,且当以上两式角标无对应物理意义时取0;
[0033]
利用一级训练模型对经验数据进行深度学习,学习结果用于进行霍普菲尔网络训练,得到二级训练模型。
[0034]
优选地,训练步态平衡包括:
[0035]
获得至少一个第二双足机器人的步态数据;
[0036]
利用第一双足机器人的二级训练模型对每个第二双足机器人的步态数据进行深度学习,将学习结果汇总,汇总后的学习结果用于进行稀疏自编码机训练,得到三级训练模型。
[0037]
优选地,所述一级训练模型是利用蒙特卡洛搜索树优化算法中的随机选取方式进行选取的。
[0038]
优选地,所述经验数据为来自第一双足机器人或第二双足机器人以往通过与所述路线信息相似度最大的路线时的步态数据。
[0039]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1