一种自动避险智能车的制作方法
1.本实用新型属于人工智能技术领域,涉及一种自动避险智能车。
背景技术:
2.随着社会的快速发展,汽车已经走进千家万户。汽车的普及造成了交通供需矛盾的日益严重,道路交通安全形势日趋恶化。近年来,因交通事故造成的伤亡人数直线攀升,但往往专家在分析交通事故的时候,会更加侧重于人与道路的因素,而对车辆性能的提高并不十分关注。如果存在一种高性能的汽车,它可以自动发现前方的障碍物,并能自动避让;在陌生的地区可以自动导航引路;甚至在特殊情况下能够自动驾驶,那将会使道路交通的安全性大大得到提高与改善。实际上这种车辆,随着科技水平的不断提高,已经不再是梦想,完全可以通过机动车辆的智能化来实现,这种智能化后的车辆通常被称之为智能车辆。
3.智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。目前对智能车辆的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年来,智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。现有的智能车避障功能不完善,不能更好地避免障碍以及减少人为因素带来的撞击伤害。
技术实现要素:
4.本实用新型的目的是提供一种自动避险智能车,解决了现有技术中存在的智能车在不能有效避障的问题。
5.本实用新型所采用的技术方案是:
6.一种自动避险智能车,包括小车本体和控制系统,所述控制系统包括控制模块,所述控制模块分别与电机模块、舵机模块、显示模块、测距模块、测速模块信号连接,所述电机模块与测速模块连接,所述电机模块和舵机模块均与连接小车的前轮,所述测距模块设置在小车本体侧壁上。
7.本实用新型的特点还在于:
8.小车本体左前、右前、左后和右后的四个角上均设置有测距模块。
9.控制模块还与蓝牙模块控制模块通过蓝牙模块与无线遥控器进行无线通信。
10.显示模块采用诺基亚5110液晶屏显示;控制模块采用ti公司的 16位单片机msp430f149芯片;测速模块采用50个孔码盘的光电编码器;蓝牙模块采用的是nrf24l01模块;测距模块为超声波模块。
11.还包括有电源模块,电源模块包括7.2v电源电路,电源电路的输出分别与升压模块的输入和降压模块的输入连接,电源模块通过升压模块为电机模块供电,电源模块分别通过降压模块为蓝牙模块、舵机模块、显示模块、测距模块、测速模块和控制模块供电。
12.本实用新型的有益效果是:
13.本实用新型可以提高车辆的自动避障与驾驶水平,保障车辆行驶的更加安全。
附图说明
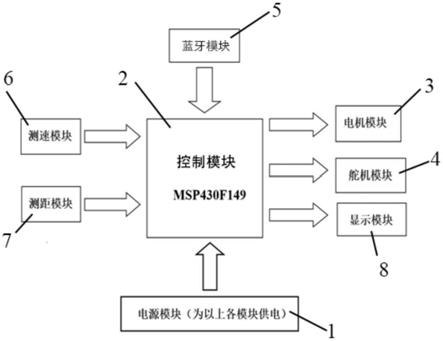
14.图1是本实用新型一种自动避险智能车中控制系统的结构图;
15.图2是本实用新型一种自动避险智能车中升压模块的电路原理图。
16.图3是本实用新型一种自动避险智能车中降压模块的电路原理图。
17.图中,1.电源模块,2.控制模块,3.电机模块,4.舵机模块,5.蓝牙模块,6.测速模块,7.测距模块,8.显示模块。
具体实施方式
18.下面结合附图和具体实施方式对本实用新型进行详细说明。
19.本实用新型一种自动避险智能车,包括小车本体和控制系统,如图1,控制系统包括控制模块2,控制模块2分别与电机模块3、舵机模块4、显示模块8、测距模块7、测速模块6信号连接,电机模块3与测速模块6连接,电机模块3和舵机模块4均与连接小车的前轮,测距模块7设置在小车本体侧壁上。
20.小车本体左前、右前、左后和右后的四个角上均设置有测距模块 7。
21.控制模块2还与蓝牙模块5控制模块2通过蓝牙模块5与无线遥控器进行无线通信。
22.显示模块8采用诺基亚5110液晶屏显示;控制模块2采用ti公司的16位单片机msp430f149芯片;测速模块6采用50个孔码盘的光电编码器;蓝牙模块5采用的是nrf24l01模块;测距模块7为超声波模块。
23.还包括有电源模块1,电源模块1包括7.2v电源电路,电源电路的输出分别与升压模块的输入和降压模块的输入连接,电源模块1 通过升压模块为电机模块3供电,电源模块1分别通过降压模块为蓝牙模块5、舵机模块4、显示模块8、测距模块7、测速模块6和控制模块2供电。
24.如图2和图3,其中升压模块包括lm2940ct-5.0高压差芯片,高压差芯片的vi引脚与高压差芯片的gnd引脚之间并联有极性电容c1和电容c2,其中电容c1与电容c2并联,其中高压差芯片的 vi引脚与极性电容c1的正极连接,高压差芯片的vi引脚还依次与二极管d1和高压差芯片的vo引脚连接,高压差芯片的vi引脚与二极管d1的正极连接,高压差芯片的vo引脚与高压差芯片的gnd 引脚之间连接有电容c3和极性电容c4和高压差芯片的gnd引脚,高压差芯片的vo引脚与极性电容c4的正极连接;其中极性电容c1 的大小为100μf,其中电容c2的大小为0.01μf,其中极性电容c4 的大小为100μf,其中电容c3的大小为0.01μf。
25.其中降压模块包括lm2596s-5.0低压差芯片,低压差芯片的vin 引脚与低压差芯片的gnd引脚之间并联有电容c10和c11,低压差芯片的gnd引脚接地,低压差芯片的gnd引脚与低压差芯片的on/off引脚连接,低压差芯片的out引脚与电感l2连接,电感 l2与低压差芯片的tab引脚之间还并联有电容c13、电容c14,电容c12,其中电容c13、电容c14和电容c12相互并联,低压差芯片的out引脚连接有稳压管d4,稳压管d4接地,其中电容c11的大小为0.1μf,其中电容c10的大小为220μf,其中电容c12的大小为10μf,其中电容c13的大小为220μf,其中电容c14的大小为0.1μf。
26.其中升压模块能够将电源电路输出的7.2v的电源电压转化为 12v,为电机模块3
供电,降压模块能够将电源电路输出的7.2v的电源电压转化为5v,为蓝牙模块5、舵机模块4、显示模块8、测距模块7、测速模块6和控制模块2供电。
27.使用时,小车本体在实行过程中,通过测距模块7测量小车四周的距离,实时将距离信息传输至控制模块2中,当达到撞击距离时,控制模块2控制电机模块3减小小车本体的行驶速度,同时控制舵机模块4改变小车的行驶方向从而完成小车的避险动作,当小车测距模块7车辆的距离逐渐变大至安全距离时,控制模块2控制电机模块3 加速至原始速度并控制舵机模块4恢复小车进行直行;在此期间测速模块6能够实时检测小车的速度,小车的速度和小车的距离实时显示在显示模块中,控制模块2通过蓝牙模块5与无线遥控器进行无线通信,使用者可以利用无线遥控来控制小车的速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1