一种常规布局通用型无人机全自动离地起飞控制系统的制作方法
1.本发明涉及无人机领域,更具体地说,是一种常规布局通用型无人机全自动离地起飞控制系统。
背景技术:
2.通用型无人机可装载不同类型的任务设备执行包括侦察、通信、干扰、打击等作战任务,根据每次执行的任务不同所加的燃油量也不同,这就导致其每次的起飞重量和重心位置变化很大,起飞抬前轮速度和俯仰力矩也随之变化。而现有的无人机地面滑跑控制一般都是按某一典型重量和重心位置估算出固定的抬前轮速度和俯仰角指令,小于此速度时纵向采用俯仰角保持模态使无人机重心轨迹保持在重心高度线上,横侧向采用前轮纠偏;一旦速度到达抬前轮速度,纵向操纵升降舵把机头拉起到设定的俯仰角,无人机抬前轮滑跑直至三轮离地,横侧向采用垂尾方向舵纠偏。但是当无人机起飞重量远小于给定重量时,无人机实际的起飞抬前轮速度小于估算速度,导致无人机在前轮抬起后依然采用前轮纠偏,不能实现纠偏;而当无人机起飞重量远大于给定重量时,实际的起飞抬前轮速度大于预估速度,导致前轮在未离地时已经不再参与纠偏控制,仅使用垂尾方向舵纠偏,由于气动效率低,难以保证精确航迹控制。另外装载不同任务设备的无人机其重心位置也会发生一定变化,导致其抬前轮所需俯仰力矩不同,使用固定的俯仰角指令操纵升降舵难以使无人机迅速抬头。现根据实际的无人机起飞重量和重心位置计算每次起飞滑跑的抬前轮速度和俯仰角指令,在小于此速度前的低速滑跑阶段使用前轮纠偏,达到抬前轮速度后操纵舵面使无人机按计算的俯仰角指令抬头,并使用垂尾方向舵纠偏,解决了重量变化大的通用型无人机地面滑跑全自动离地起飞。
技术实现要素:
3.本发明解决的技术问题是:本发明的目的是提出一种常规布局通用型无人机全自动离地起飞控制系统,解决了起飞重量和重心位置变化较大的无人机地面滑跑的自动离地起飞问题,使其在给定的速度下实现自动起飞离地。
4.本发明进一步的技术方案是:一种常规布局通用型无人机的地面滑跑控制系统,其特征在于,包括滑跑阶段纵向俯仰通道控制系统结构和滑跑阶段侧向通道航迹控制结构;
5.所述滑跑阶段纵向俯仰通道控制系统结构包括垂直陀螺、速率陀螺、升降舵机和机载计算机;垂直陀螺测量无人机的俯仰角和滚转角;速率陀螺测量无人机的俯仰角速率、滚转角速率和偏航角速率;升降舵机用于执行舵面偏转指令,机载计算机用于采集各个传感器的测量信息,将传感器测量信息带入控制律解算出各个舵面的舵偏角度,控制各个舵机驱动舵面偏转;机载计算机采集垂直陀螺测量的俯仰角和速率陀螺测量的俯仰角速率信息,将俯仰角和俯仰角速率值带入纵向俯仰通道控制律,解算出纵向俯仰通道的升降舵舵面偏转角度,当无人机的俯仰角和俯仰角指令值存在偏差时,操纵升降舵机偏转升降舵面,
从而改变无人机的俯仰姿态。
6.滑跑阶段侧向通道航迹控制结构包括磁航向仪、速率陀螺、差分gps、机载计算机、前轮舵机和方向舵机;磁航向仪测量无人机的偏航角;速率陀螺测量无人机的俯仰角速率、滚转角速率和偏航角速率;差分gps用于测量无人机的侧向航偏;前轮舵机用于执行前轮偏转指令;方向舵机用于执行方向舵舵面偏转指令;机载计算机用于采集各个传感器的测量信息,将传感器测量信息带入控制律解算出各个舵面的舵偏角度,控制各个舵机驱动舵面偏转;在侧向通道控制系统中,机载计算机采集磁航向仪测量的偏航角、速率陀螺测量的偏航角速率、以及差分gps测量的侧向航偏信息,将偏航角和偏航角速率、侧向航偏值带入侧向通道控制律,解算出前轮和方向舵以及副翼舵面偏转角度,当无人机的侧向航偏和给定的指令值存在偏差时,操纵前轮舵机偏转前轮,以及方向舵机偏转方向舵,从而改变无人机的侧向航迹。
7.本发明进一步的技术方案是:在无人机从开始滑跑到加速到抬前轮速度前,纵向处于俯仰角保持模态,给定某一俯仰角指令,使无人机重心轨迹一直保持在重心高度线上;当加速到速度大于抬前轮速度时,操纵升降舵把机头拉起到设定的俯仰角,使无人机离陆。
8.本发明进一步的技术方案是:当无人机侧向航迹和航迹指令存在偏差时,操纵前轮机构和方向舵使无人机改变航向,使无人机沿跑道中心线滑跑;滚转角稳定功能则由副翼实现,在滑跑段给定0度滚转角指令,利用滚转角和滚转速率构成滚转控制回路,保持无人机的机翼水平,并为高速滑跑提供滚转阻尼。
9.发明效果
10.本发明的技术效果在于:使用本方法的子步骤1和子步骤2,能够针对无人机每次的起飞重量和重心位置,计算无人机抬前轮速度和俯仰角指令值,从而能够精确控制无人机的起飞离地,在离地前纵向采用俯仰角保持模态使无人机重心轨迹保持在重心高度线上,横侧向采用前轮纠偏;一旦速度到达抬前轮速度,纵向操纵升降舵把机头拉起到设定的俯仰角,无人机抬前轮滑跑直至三轮离地,横侧向采用垂尾方向舵纠偏。该方法相比较之前的按某一典型重量估算出固定的抬前轮速度和俯仰角指令的优越性在于,使用根据固定重量计算抬前轮速度和俯仰角指令的控制方法,不能准确估计不同重量和重心状态的无人机离地时间,导致在当无人机起飞重量和重心位置与固定的重量和重心位置相差较大时,当无人机起飞重量远小于给定重量时,无人机实际的起飞抬前轮速度小于估算速度,导致无人机在前轮抬起后依然采用前轮纠偏,不能实现纠偏;而当无人机起飞重量远大于给定重量时,实际的起飞抬前轮速度大于预估速度,导致前轮在未离地时已经不再参与纠偏控制,仅使用垂尾方向舵纠偏,由于气动效率低,难以保证精确航迹控制。
附图说明
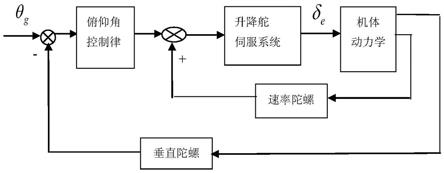
11.图1为滑跑阶段纵向俯仰通道控制结构图
12.图2为滑跑阶段侧向通道航迹控制结构图
具体实施方式
13.参见图1—图2,无人机地面滑跑段的主要控制目的是:使无人机以一定的俯仰角始终沿跑道中心线加速滑行,直至达到离地起飞速度后,偏转升降舵,使无人机抬前轮形成
起飞迎角,离地起飞。由上述控制目的可知,自适应滑跑控制器主要包括纵向和横侧向控制器。纵向控制包括速度控制、俯仰角控制。横侧向控制包括航迹控制和滚转控制。滑跑阶段的导引逻辑以滑跑速度作为判断条件的。需要完成的导引指令包括俯仰方向的俯仰角控制指令、侧向的侧偏和偏航角指令、发动机指令、紧急停车/刹车指令等。下面分别给出其纵向和横侧向控制技术方案。
14.1)纵向控制
15.地面加速滑跑段的纵向控制主要包括:速度控制、俯仰角控制。
16.速度控制:无人机开始停在跑道中心线,并处于最大刹车状态,逐渐增加发动机油门到最大,当达到最大的推力时,松开刹车,无人机进入加速滑跑阶段。
17.俯仰角控制:无人机从开始滑跑到加速到抬前轮速度前,纵向处于俯仰角保持模态,给定某一俯仰角指令,使无人机重心轨迹一直保持在重心高度线上;当加速到速度大于抬前轮速度时,操纵升降舵把机头拉起到设定的俯仰角,使无人机离陆。
18.地面滑跑俯仰角纵向控制律初步确定如式1:
19.f_δ
e
=k
v
·
[k
θ
·
(θ
g
‑
θ)+k
q
·
q]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0020][0021]
上式中,θ为无人机俯仰角;q为俯仰角速率;δ
e
为升降舵偏转角;k
θ
、k
q
为放大系数;k
v
为速度变参系数。当无人机的滑跑速度小于抬前轮速度v
抬前轮
时,θ
g
=θ0为停机角;当滑跑速度达到抬前轮速度v
抬前轮
时,根据无人机的实际重量和重心位置计算得到俯仰角指令值θ
g_lq
,v
抬前轮
的计算公式如下:
[0022]
抬前轮速度计算公式如下:
[0023][0024]
上式中,a为安全系数,c
l
为无人机起飞升力系数,ρ为机场跑道空气密度,s 为机翼面积,g为无人机的实际重量。
[0025]
为了使无人机离地,除了满足升力等于重力、推力等于阻力外,还应满足对无人机重心的俯仰合力矩为零,必须偏转相应的升降舵偏度,由此可以计算得到所需的俯仰角指令值θ
g_lq
,计算公式如下:
[0026][0027]
上式中,δx
g
为重心距离主起落架沿机体轴尺寸,q为动压c
m0
、c
mα
、 c
mδe
分别为无人机的零升力矩系数、静稳定性导数、升降舵俯仰力矩操纵导数。
[0028]
2)横侧向控制:
[0029]
在起飞滑跑过程中,无人机加速到抬前轮速度之前,侧向处于航迹控制模态,要求侧向轨迹保持在跑道中心线。而滚转通道处于滚转角稳定模态,即在高速滑跑阶段操纵副翼舵面,抑制滚转方向的扰动。前轮只用于低速段滑跑纠偏,方向舵则在起飞和着陆滑跑的全过程用作辅助纠偏控制。因此起飞滑跑侧向控制主要是综合利用前轮和方向舵偏转两种
控制方式进行联合纠偏。
[0030]
前轮控制律输出:
[0031][0032]
方向舵纠偏控制律如下:
[0033]
f_δ
r
=k
ψr
·
(ψ
g
‑
ψ)+k
r
·
r+k
yr
·
(y
g
‑
y)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0034]
副翼通道的控制律为:
[0035]
f_δ
a
=k
φ
·
(φ
g
‑
φ)+k
p
·
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0036]
式中,
[0037]
ψ为偏航角;φ为滚转角;y为侧向航偏;
[0038]
p为滚转角速率;r为偏航角速率;
[0039]
δ
ξ
为前轮偏转角;δ
r
为方向舵偏转角;δ
a
为副翼偏转角;
[0040]
k
ψξ
前轮航向放大系数、k
rξ
前轮偏航角速率放大系数、k
yξ
前轮航偏放大系数;
[0041]
k
ψr
方向舵航向放大系数、k
r
偏航角速率放大系数、k
yr
方向舵航偏放大系数、k
p
滚转角速率、k
φ
为滚转角放大系数;
[0042]
图1给出了滑跑阶段纵向俯仰通道控制系统结构,包括由速率陀螺反馈的俯仰阻尼回路、由垂直陀螺反馈的俯仰控制回路。该控制系统包括的部件有:垂直陀螺、速率陀螺、升降舵机、机载计算机。垂直陀螺测量无人机的俯仰角和滚转角;速率陀螺测量无人机的俯仰角速率、滚转角速率和偏航角速率;升降舵机用于执行舵面偏转指令,机载计算机用于采集各个传感器的测量信息,将传感器测量信息带入控制律解算出各个舵面的舵偏角度,控制各个舵机驱动舵面偏转。在俯仰通道控制系统中,机载计算机采集垂直陀螺测量的俯仰角和速率陀螺测量的俯仰角速率信息,将俯仰角和俯仰角速率值带入纵向俯仰通道控制律,解算出纵向俯仰通道的升降舵舵面偏转角度,当无人机的俯仰角和俯仰角指令值存在偏差时,操纵升降舵机偏转升降舵面,从而改变无人机的俯仰姿态。在无人机从开始滑跑到加速到抬前轮速度前,纵向处于俯仰角保持模态,给定某一俯仰角指令,使无人机重心轨迹一直保持在重心高度线上;当加速到速度大于抬前轮速度时,操纵升降舵把机头拉起到设定的俯仰角,使无人机离陆。
[0043]
图2给出了滑跑阶段侧向通道航迹控制结构。图中包括由速率陀螺反馈的偏航阻尼回路、由磁航向仪反馈的航向控制回路及由差分gps反馈组成的航迹控制回路,该控制系统包括的部件有:磁航向仪、速率陀螺、差分gps、机载计算机、前轮舵机、方向舵机。磁航向仪测量无人机的偏航角;速率陀螺测量无人机的俯仰角速率、滚转角速率和偏航角速率;差分gps用于测量无人机的侧向航偏;前轮舵机用于执行前轮偏转指令;方向舵机用于执行方向舵舵面偏转指令;机载计算机用于采集各个传感器的测量信息,将传感器测量信息带入控制律解算出各个舵面的舵偏角度,控制各个舵机驱动舵面偏转。在侧向通道控制系统中,机载计算机采集磁航向仪测量的偏航角、速率陀螺测量的偏航角速率、以及差分gps测量的侧向航偏信息,将偏航角和偏航角速率、侧向航偏值带入侧向通道控制律,解算出前轮和方向舵以及副翼舵面偏转角度,当无人机的侧向航偏和给定的指令值存在偏差时,操纵前轮舵机偏转前轮,以及方向舵机偏转方向舵,从而改变无人机的侧向航迹。当无人机侧向航迹和航迹指令存在偏差时,操纵前轮机构和方向舵使无人机改变航向,使无人机沿跑道中心
线滑跑。滚转角稳定功能则由副翼实现,在滑跑段给定0度滚转角指令,利用滚转角和滚转速率构成滚转控制回路,保持无人机的机翼水平,并为高速滑跑提供滚转阻尼。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1