一种无人水面艇控制电路
1.本实用新型涉及船舶智能控制领域,尤其涉及一种无人水面艇控制电路。
背景技术:
2.现代船舶智能控制技术随着通信、传感器和计算机等技术的发展也发生了巨大改变。计算机技术的一个重要分支就是嵌入式控制技术,嵌入式系统已经运用于工控、汽车、家电等领域当中,同样也给船舶智能控制技术领域带来更大的机遇。嵌入式系统具有微型计算机系统的功能和特点,还在可靠性、实时性、结构和体积等方面性能卓越。现代船舶自动化系统正朝着智能化、数字化、网络化的方向发展,而嵌入式系统的诸多优点满足船舶控制系统进一步发展的要求,并会成为新一代船舶智能控制系统的发展趋势。
3.无人水面艇是一种在水面进行自主航行的运载平台,属于海洋机器人的一个重要分支,在军用和民用领域均有广泛应用前景。由于水面环境不确定因素多,以及无人水面艇运动模型特殊,使得无人水面艇较于无人车和无人机等其他无人系统,无人水面艇的研究面临着特殊的挑战。
技术实现要素:
4.实用新型目的:本实用新型目的是提供一种无人水面艇控制电路,可通过远处红外遥控、语音控制、近距离电容感测三种方式实现对无人艇的控制。
5.技术方案:本实用新型提供一种无人水面艇控制电路,该电路包括电源开关电路以及与主控stm32单片机信号连接的语音控制电路、红外接收头、倾角检测电路、艏部非接触式电容感测电路、艇底部电推组、艉部推进电机组、艉部偏航电机组;主控stm32单片机用于接收并处理远处红外遥控、语音控制、近距离电容感测三种方式的控制信号,实现无人艇的运动。
6.优选地,电源开关电路包括11v降5v部分、5v转3.3v部分和j3电源端子; 11v降5v部分由降压芯片lm2596s及其外围电路组成,降压芯片lm2596s的 1脚和2脚之间串接有电容c8和二极管d5,且电容c8和二极管d5之间接地,二极管d5起钳位作用,电容c8两端并联有电容c7,电容c7和电容c8用于滤波和稳压,且1脚接有电源11.1v端;降压芯片lm2596s的2脚和4脚之间串接有电感l2、电容c6、电阻r2,且电感l2、电容c6组成lc振荡回路,起放大作用,电容c6和电阻r2之间接有gnd端,且gnd端和电阻r2之间接降压芯片lm2596s的3脚,4脚和5脚之间串接有电阻r7和电容c9,电阻r7和电容 c9之间接有输出5v电源,且串接电阻r9与发光二极管d6,发光二极管阴极接 gnd,发光二极管d6用于指示电源通断;
7.5v转3.3v部分由稳压芯片ams1117及其外围电路组成,稳压芯片ams1117 的1脚接gnd端,1脚和2脚之间串接有电容c27,电容c27两端并联有电容 c28,且2脚接有电源3.3v端;1脚和3脚之间串接有电容c26,电容c26两端并联有电容c25,且3脚接有电源3.3v端;
8.j3电源端子的1脚接gnd端,2脚接电源。
9.优选地,主控stm32单片机外围电路有:外部晶振电路、复位电路和boot 启动电
路;主控stm32单片机与各模块的引脚连接关系如下:单片机pc0至pc3 引脚分别依次连接艉部推进电机组中u4引脚in1至in4,单片机pb5、pb8、pd0、 pd1引脚分别依次连接艉部推进电机组中u2引脚in1至in4;单片机pd2引脚接红外接收头的1脚;单片机的pb6、pb7分别依次连接六轴陀螺仪芯片mpu6050 的scl、sda引脚;单片机pd9至pd 10引脚依次连接艇部电推组u7的引脚 inta1、intb1引脚,pd11至pd12引脚依次连u8的引脚inta2、intb2引脚;单片机pb9、pb10引脚依次连接接艉部偏航电机组u6的inta0、intb0引脚;单片机pc4、pc5引脚依次连接二代电容芯片fdc2214的scl、sda引脚;单片机pd5至pd8引脚分别依次连接语音控制模块ld3320的p3至p6引脚。
10.优选地,语音控制电路由语音识别芯片ld3320及其外围电路组成;ld3320 的6脚接vdd端,ld3320的12脚串接电容c37到gnda端,电容c37起滤波作用,且电容c37两端并联有电容cf1;ld3320的20脚和22脚之间串接有电容c38和电阻r29、r30,电阻r29、r30电阻之间接ld3320的21脚,且电阻 r30两端接有电容c40;ld3320的29脚串接有led1和电阻r25、vdd端,ld3320 的30脚串接有led2和电阻r26;ld3320的18脚串接有电容c42和gnda端,且电容c42两端并联有电容cf2,j7为ld3320的公共接地端口。
11.优选地,红外接收头3脚串接滤波电容c29和gnd端,滤波电容c29起降低电源纹波,提高瞬态电流作用,且3脚和电容c29之间接有电源3.3v端,由电源开关电路提供。
12.优选地,倾角检测电路由六轴陀螺仪芯片mpu6050引出的iic总线接口及外围电路组成;六轴陀螺仪芯片mpu6050的1脚接gnd端,8脚串接有电容c41 和gnd端,且8脚和电容c41之间接电源3.3v端;mpu6050的9脚串接有电阻 r32和gnd端,10脚和11脚之间串接有电容c43,且11脚和电容c43之间接有gnd端;mpu6050的13脚接电源3.3v,且13脚串接有电容c39和gnd端; mpu6050的18脚接地,20脚串接有电容c34和gnd端;引出的iic总线接口 v3供电电压是3.3v,mpu6050的3脚、4脚分别接stm32单片机的pb6和pb7 引脚。
13.优选地,艏部非接触式电容感测电路由二代电容芯片fdc2214及其外围电路,振荡芯片625l3c040m00000及其外围电路组成;fdc2214芯片共16个引出口,额定供电电压为3.3v,通过iic方式与stm32单片机通讯;fdc2214芯片的sd脚串接电阻r16和gnd脚,scl脚串接有上拉电阻r12和3.3v电源,sda 脚同理串接有上拉电阻r11和3.3v电源;fdc2214芯片的addr脚、pad脚接地,vdd脚串接滤波电容c30和gnd脚,且电容c30两端并联有两电容c31 和c32;fdc2214芯片的in0a、in0b脚接一个lc振荡电路,用来调整振荡频率,lc振荡电路由c20至c24、l5、r14、r18和j5端口组成,其中,l5为18uh, c22为33pf;其余组端口与in0a、b相同配置,j1、j2、j4、j5端口为接外部覆铜板端口,4个端口组成四极板差分式手势测试区域;
14.振荡芯片625l3c040m00000的3脚串接电阻r19到fdc2214芯片的时钟输入脚clkin,为fdc2214芯片提供来自外部的振荡源,且电阻r19和clkin之间接有电阻r21和gnd,电阻r20和j6端口,j6端口为公共接地端;振荡芯片 1脚串接电阻r22和gnd端,2脚接地,4脚接电源vdd端,且串接有电容c33 和gnd端。
15.优选地,艉部推进电机组由两个l298n芯片u2、u4及外围电路驱动b1
‑
4 四个直流电机;l298n的工作电压为12v,l298n芯片u2的in1至in4引脚分别依次接单片机pb5、pb6、pd0、pd1引脚,ena引脚串接电阻r4到gnd端, enb引脚串接电阻r5到gnd端;out1至4引脚分别接b1,b2的正负极,且中间的8只二极管d1
‑
8用于消除电机换向产生的反电动势,l298n芯片u4的接法与u2的接法相同。
16.优选地,艇底部电推组、艉部偏航电机组由三个电机驱动u6、u7、u8和4 个电动推杆和2个电机组成;电机驱动其型号为bed01,供电电压为12v,其中, u6的inta0、intb0连接stm32单片机的pb9,pb10引脚,u7的inta1、intb1 连接stm32单片机的pd9,pd10引脚,u8的inta2、intb2连接stm32单片机的pd11,pd12引脚;bed0输出口out接电动推杆或电机。电动推杆的行程为0.5米,最大推力20kg,驱动电压为12v。所述电机型号为jgb37
‑
555,减速比506,输出力矩11.09n/m。
17.有益效果:与现有技术相比,本实用新型具有如下显著的优点:
18.基于六轴陀螺仪mpu6050设计了倾角检测电路,可实现无人水面艇的姿态检测和任意角度的纠偏;基于红外接收头1838b设计了红外遥控电路,可实现无人水面艇的远距离控制;基于语音识别芯片ld3320设计了语音控制电路,可实现无人水面艇25m内的语音控制;基于电容传感芯片fdc2214设计了艏部非接触式电容感测电路,可实现手势控制无人水面艇系统的开机、待机、关机等;基于 stm32单片机设计的多传感器无人水面艇控制电路,可通过远处红外遥控、语音控制、近距离电容感测三种方式实现无人艇的快速前进、任意角度偏转、掉头、浅水滩搁浅等动作。本实用新型电路实用范围广泛,大到运用于大型无人水面艇,小到运用于小型观赏船模,本实用新型切合实际,实用性强。
附图说明
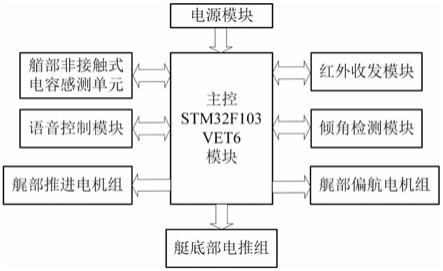
19.图1为系统示意图;
20.图2为主控stm32单片机电路;
21.图3为艉部推进电机组电路;
22.图4为电源开关电路和红外接收电路;
23.图5为倾角检测电路;
24.图6为艇底部电推组电路;
25.图7为艏部非接触式电容感测电路;
26.图8为语音控制电路;
27.图9为艉部偏航电机组电路;
具体实施方式
28.下面结合附图对本实用新型的技术方案作进一步说明。
29.如图1所示为本实用新型的系统示意图,该电路包括包括电源开关电路以及与主控stm32单片机信号连接的语音控制电路、红外接收头、倾角检测电路、艏部非接触式电容感测电路、艇底部电推组、艉部推进电机组、艉部偏航电机组;主控stm32单片机用于接收并处理远处红外遥控、语音控制、近距离电容感测三种方式的控制信号,实现无人艇的运动。
30.系统接入12v稳压源,人手以“ok”手势放入艏部四极板差分区域时,电容传感器检测到“ok”手势,电路导通,系统开始工作。
31.红外遥控时,通过远处遥控器发送指令,实现无人艇的远程红外遥控;语音控制时,ld3320语音识别模块进入等待模式,准备接收语音指令,测试人员发出语音指令后,艉部推进电机组、艉部偏航电机组和艇底部电推组执行相应预设动作,完成无人艇的语音控制,实现了无人艇的快速前进、任意角度偏转、掉头、浅水滩搁浅等动作;本实用新型围绕德
州仪器的最新二代电容芯片fdc2214,设计了艏部非接触式电容感测电路,实现了非接触式的手势识别:“ok”手势表示上电开机、“5”手势表示待机、“2”手势表示浅水滩搁浅、“0”手势表示断电关机。
32.通过使用红外接收头1838b、六轴陀螺仪mpu6050、电容传感器fdc2214、语音识别模块ld3320等,实现了无人艇的多种方式控制,在保证电路待机时较低功耗情况下,设计的智能水面艇控制电路,具有实用价值。
33.如图4所示,电源开关电路包括11v降5v部分、5v转3.3v部分和j3电源端子;11v降5v部分由降压芯片lm2596s及其外围电路组成,降压芯片lm2596s 的1脚和2脚之间串接有电容c8和二极管d5,且电容c8和二极管d5之间接地,二极管d5起钳位作用,电容c8两端并联有电容c7,电容c7和电容c8用于滤波和稳压,且1脚接有电源11.1v端;降压芯片lm2596s的2脚和4脚之间串接有电感l2、电容c6、电阻r2,且电感l2、电容c6组成lc振荡回路,起放大作用,电容c6和电阻r2之间接有gnd端,且gnd端和电阻r2之间接降压芯片lm2596s的3脚,4脚和5脚之间串接有电阻r7和电容c9,电阻r7和电容c9之间接有输出5v电源,且串接电阻r9与发光二极管d6,发光二极管阴极接gnd,发光二极管d6用于指示电源通断;
34.5v转3.3v部分由稳压芯片ams1117及其外围电路组成,稳压芯片ams1117 的1脚接gnd端,1脚和2脚之间串接有电容c27,电容c27两端并联有电容 c28,且2脚接有电源3.3v端;1脚和3脚之间串接有电容c26,电容c26两端并联有电容c25,且3脚接有电源3.3v端;
35.j3电源端子的1脚接gnd端,2脚接电源。
36.如图2所示,主控stm32单片机外围电路有:外部晶振电路、复位电路和 boot启动电路;主控stm32单片机与各模块的引脚连接关系如下:单片机pc0 至pc3引脚分别依次连接艉部推进电机组中u4引脚in1至in4,单片机pb5、 pb8、pd0、pd1引脚分别依次连接艉部推进电机组中u2引脚in1至in4;单片机pd2引脚接红外接收头的1脚;单片机的pb6、pb7分别依次连接六轴陀螺仪芯片mpu6050的scl、sda引脚;单片机pd9至pd 10引脚依次连接艇部电推组u7的引脚inta1、intb1引脚,pd11至pd12引脚依次连u8的引脚inta2、 intb2引脚;单片机pb9、pb10引脚依次连接接艉部偏航电机组u6的inta0、 intb0引脚;单片机pc4、pc5引脚依次连接二代电容芯片fdc2214的scl、 sda引脚;单片机pd5至pd8引脚分别依次连接语音控制模块ld3320的p3至 p6引脚。
37.如图8所示,语音控制电路由语音识别芯片ld3320及其外围电路组成; ld3320的6脚接vdd端,ld3320的12脚串接电容c37到gnda端,电容c37 起滤波作用,且电容c37两端并联有电容cf1;ld3320的20脚和22脚之间串接有电容c38和电阻r29、r30,电阻r29、r30电阻之间接ld3320的21脚,且电阻r30两端接有电容c40;ld3320的29脚串接有led1和电阻r25、vdd 端,ld3320的30脚串接有led2和电阻r26;ld3320的18脚串接有电容c42 和gnda端,且电容c42两端并联有电容cf2,j7为ld3320的公共接地端口。
38.如图4所示,红外接收头3脚串接滤波电容c29和gnd端,滤波电容c29 起降低电源纹波,提高瞬态电流作用,且3脚和电容c29之间接有电源3.3v端,由电源开关电路提供。
39.如图5所示,倾角检测电路由六轴陀螺仪芯片mpu6050引出的iic总线接口及外围电路组成;六轴陀螺仪芯片mpu6050的1脚接gnd端,8脚串接有电容 c41和gnd端,且8脚和电容c41之间接电源3.3v端;mpu6050的9脚串接有电阻r32和gnd端,10脚和11脚之间串接有电容c43,且11脚和电容c43之间接有gnd端;mpu6050的13脚接电源3.3v,且13脚串接有电容
c39和gnd 端;mpu6050的18脚接地,20脚串接有电容c34和gnd端;引出的iic总线接口v3供电电压是3.3v,mpu6050的3脚、4脚分别接stm32单片机的pb6和 pb7引脚。
40.如图7所示,艏部非接触式电容感测电路由二代电容芯片fdc2214及其外围电路,振荡芯片625l3c040m00000及其外围电路组成;fdc2214芯片共16个引出口,额定供电电压为3.3v,通过iic方式与stm32单片机通讯;fdc2214芯片的sd脚串接电阻r16和gnd脚,scl脚串接有上拉电阻r12和3.3v电源, sda脚同理串接有上拉电阻r11和3.3v电源;fdc2214芯片的addr脚、pad 脚接地,vdd脚串接滤波电容c30和gnd脚,且电容c30两端并联有两电容 c31和c32;fdc2214芯片的in0a、in0b脚接一个lc振荡电路,用来调整振荡频率,lc振荡电路由c20至c24、l5、r14、r18和j5端口组成,其中,l5 为18uh,c22为33pf;其余组端口与in0a、b相同配置,j1、j2、j4、j5端口为接外部覆铜板端口,4个端口组成四极板差分式手势测试区域;
41.振荡芯片625l3c040m00000的3脚串接电阻r19到fdc2214芯片的时钟输入脚clkin,为fdc2214芯片提供来自外部的振荡源,且电阻r19和clkin之间接有电阻r21和gnd,电阻r20和j6端口,j6端口为公共接地端;振荡芯片 1脚串接电阻r22和gnd端,2脚接地,4脚接电源vdd端,且串接有电容c33 和gnd端。
42.如图3所示,艉部推进电机组由两个l298n芯片u2、u4及外围电路驱动 b1
‑
4四个直流电机;l298n的工作电压为12v,l298n芯片u2的in1至in4引脚分别依次接单片机pb5、pb6、pd0、pd1引脚,ena引脚串接电阻r4到gnd 端,enb引脚串接电阻r5到gnd端;out1至4引脚分别接b1,b2的正负极,且中间的8只二极管d1
‑
8用于消除电机换向产生的反电动势,l298n芯片u4的接法与u2的接法相同。
43.如图6和图9所示,艇底部电推组、艉部偏航电机组由三个电机驱动u6、 u7、u8和4个电动推杆和2个电机组成;电机驱动其型号为bed01,供电电压为12v,其中,u6的inta0、intb0连接stm32单片机的pb9,pb10引脚, u7的inta1、intb1连接stm32单片机的pd9,pd10引脚,u8的inta2、intb2 连接stm32单片机的pd11,pd12引脚;bed0输出口out接电动推杆或电机。电动推杆的行程为0.5米,最大推力20kg,驱动电压为12v。所述电机型号为 jgb37
‑
555,减速比506,输出力矩11.09n/m。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1