一种飞机地面综合控制系统及控制方法与流程
1.本发明涉及飞机地面控制技术领域,具体是一种飞机地面综合控制方法及系统。
背景技术:
2.目前,飞机在地面时,从停机坪开始使用停机刹车,用牵引车推出,启动发动机开始滑行,直至进入跑道准备起飞,着陆后使用刹车制动飞机,通过发动机控制飞机速度使飞机滑行,再到用牵引车滑入停机坪,整个飞机在地面时飞行员需要用到多个不同的系统,进行多种操纵,负担较重。
3.公开号cn106228500a的发明创造中公开了一种飞机智能自动刹车方法和系统,该发明提到了通过共享的跑道数据,规划飞机自动刹车方案,并在飞机着陆后实施自动刹车,但该发明未考虑飞机在滑行道时的智能滑行过程,也没有与飞机的电驱动系统集成。
4.公开号us2005/0261814a1的发明创造中公开了一种冲出跑道预防方法和装置,该发明通过跑道长度以及着陆所需跑道长度,计算飞机着陆跑道的关键点,并在飞机实时刹车过程中进行所需跑道距离的计算,显示以及告警,但该发明并为考虑根据跑道长度实施自动刹车,也没有考虑滑行道时的自动滑行过程以及驱动过程。
5.现有技术中,飞机的刹车系统、转弯系统、飞机滑行功能分别为独立的系统。飞机转弯系统通过方向舵和副翼,改变舵面上的空气动力,实现飞机的转弯功能。飞机滑行阶段使用发动机使飞机在地面低速滑行。这些系统相互之间无信息交互、反馈,并且各系统之间并未载入飞机的跑道信息,没有根据实时的跑道信息对飞机实施自动刹车、加速以及转弯功能。
技术实现要素:
6.为克服现有技术中存在的飞机在地面控制时飞行员操纵系统多,操纵的系统之间无信息交换,滑行阶段使用发动机控制影响发动机寿命以及造成的污染的不足,本发明提出了一种飞机地面综合控制系统及控制方法。
7.本发明提出的飞机地面综合控制系统包括飞机地面综合控制器、显示模块、警告模块、记录模块、和电驱动执行器、刹车执行器、停机执行器、传感器、障碍物检测及定位系统和机场跑道信息模块。
8.其中,所述机场跑道信息模块的输出端与飞机地面综合控制器的第一输入端口联通,飞机地面综合控制器接收机场跑道信息模块发送的跑道信息;所述跑道信息包括:跑道长度、跑道布局、廊桥停机坪位置、跑道粘着系数。该飞机地面综合控制器第一端口接收信息后通过ad模块进行处理。障碍物检测及定位系统与飞机地面综合控制器的第二输入端口联通;该障碍物检测及定位系统将检测到的飞机的实时位置信息以及跑道范围内的障碍物的位置、速度信息发送到飞机地面综合控制器,该飞机地面综合控制器第二输入端口接收信息后通过ad模块进行处理。传感器的输出端与飞机地面综合控制器的第三输入端口联通,提供机轮速度信号和刹车压力信号。
9.显示模块的输入端与飞机地面综合控制器的第一输出端口联通;该显示模块接收飞机地面综合控制器输出的飞机处于驱动模式、刹车模式、停机模式或转弯模式以及飞机相对跑道的位置信息,用于显示飞机的地面信息。
10.警告模块的输入端与飞机地面综合控制器的第二输出端口联通;该警告模块接收地面综合控制输出的听觉警告信息,包括警报和语音告警。
11.记录模块的输入端与飞机地面综合控制器的第三输出端口联通,通过该记录模块接收并记录飞机地面综合控制器发出的系统信息;所述系统信息包括刹车指令、驱动指令、机轮速度、飞机信息、障碍物信息、停机信息、跑道信息以及故障信息。
12.飞机地面综合控制器的第四输出端口与电驱动执行器的第四输入端联通。所述飞机地面综合控制器通过驱动电流控制驱动电机,驱动飞机的机轮加速转动。
13.飞机地面综合控制器的第五输出端口与刹车执行器的输入端联通,飞机地面综合控制器通过刹车电流控制刹车执行器,实现机轮刹车。
14.飞机地面综合控制器的第六输出端口与停机执行器的输入端联通,飞机地面综合控制器通过开关量信号控制停机执行器,使飞机实现停机功能。
15.所述飞机地面综合控制器包括fpga、da模块以及ad模块,通过所述的fpga、da模块以及ad模块接收/传输信息,并通过cpu或dsp实现对获取信息的处理。
16.所述障碍物检测及定位系统包括位置传感器、速度传感器,并采用gps系统或北斗星系统;机场跑道信息模块用于存储机场的跑道信息,对飞机着陆的跑道进行数据匹配,将飞机着陆的跑道信息发送到飞机地面综合控制器。
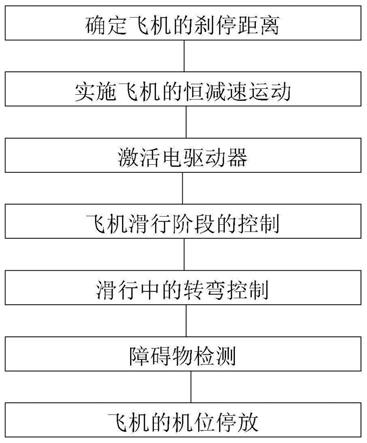
17.一种利用所述综合控制系统进行控制的具体过程是:
18.步骤一、确定飞机的刹停距离:
19.在判断飞机的刹停距离时,通过机场跑道信息模块,获取跑道的长度、布局、廊桥停机坪位置、跑道粘着系数以及设定着陆轨迹,并根据得到的跑道黏着系数μ以及飞机的着陆速度v,计算刹停飞机所需的刹停距离l
r
。
20.对得到的刹停距离l
r
及跑道长度l
m
进行对比,如果飞机所需的刹停距离大于跑道长度,显示所需的刹停距离,并向飞行员告警;如果停所需的刹距离小于等于跑道长度,则显示刹停飞机所需的距离。
21.通过公式(1)和(2)确定刹停飞机所需的刹停距离l
r
:
22.a
m
=n*μ*g/m
ꢀꢀꢀ
(1)
23.l
r
=v2/2a
m
ꢀꢀꢀ
(2)
24.其中,其中n为起落架个数,g为每个起落架分别承受的重力,m为飞机质量,a
m
为跑道提供的飞机实施的最大减速率。
25.步骤二、实施飞机的恒减速运动:
26.根据得到的跑道长度,计算飞机所需减速率a
t
,按照减速率a
t
控制飞机实施恒减速运动。
27.通过公式(3)计算飞机所需减速率a
t
28.a
t
=2*l
m
/v2ꢀꢀꢀ
(3)
29.所述飞机地面综合控制器接收由航姿系统发出的飞机实时减速率a
r
,并计算所述飞机所需减速率a
t
与飞机实时减速率a
r
的差值,进行pid控制,得到实时刹车指令。向控制刹
车执行器输出所述的实时刹车指令。通过该刹车执行器控制飞机按照减速率a
t
实施减速,直至飞机进入滑行状态。
30.步骤三、激活电驱动器:
31.飞机地面综合控制器根据传感器检测到的各机轮的速度,通过综合对比各个机轮速度,控制飞机的电驱动执行器的状态。
32.所述综合对比是根据不同的机型选取机轮数量的50%或者75%的机轮,并根据选取机轮的速度进行安全性评估。
33.在进行所述安全性评估时,若有50%或者75%的机轮速度均大于飞机的速度阈值v
e
,则保持电驱动执行器的关闭状态。若有50%或者75%的机轮速度均小于等于飞机的速度阈值v
e
,则激活电驱动执行器,电驱动执行器在接收到驱动指令时,实现加速功能。
34.所述飞机的速度阈值v
e
为30km/h。
35.步骤四、飞机滑行阶段的控制:
36.当飞机进入滑行道滑行时,根据获取的跑道布局,按照设定滑行路线,使飞机按照预设的滑行速度v
a
行驶。当机轮速度传感器检测到飞机速度降低到v
a
‑
δv以下时,飞机地面综合控制器输出驱动指令,控制电驱动执行器,直到飞机速度达到v
a
,飞机地面综合控制器不再输出驱动指令。反之,当机轮速度传感器检测到飞机速度上升到v
a
+δv以上时,飞机地面综合控制器输出刹车指令,控制刹车执行器,使飞机减速到v
a
,控制器不再输出刹车指令。
37.其中,v
a
为滑行速度,δv为滑行速度偏差值。
38.所述滑行速度v
a
根据不同机型进行设定,为20~30km/h。所述滑行速度偏差值δv为3~5km/h。
39.步骤五、滑行中的转弯控制:
40.获取飞机预定的轨迹转弯信息,包括转弯角度α、转弯起始位置坐标以及终止位置坐标。
41.当飞机在滑行中转弯时,当飞机到达转弯起始位置时,通过控制飞机各主机轮的速度实施转弯。当飞机在滑行中转弯时,当飞机到达转弯起始位置时,通过控制飞机各主机轮的速度实施转弯。在机轮减速或加速时,该机轮的速度满足确定的减速机轮的速度v
b
、加速机轮的速度v
d
。
42.根据公式(4)和公式(5)分别确定减速机轮的速度v
b
、加速机轮的速度v
d
:
[0043][0044][0045]
其中,l
n
为飞机前机轮到主机轮的纵向距离;l
m
为飞机前机轮到主机轮的横向距离;v
a
是飞机转弯速度,α为偏转角度。
[0046]
当飞机到达转弯终止位置时,飞机地面综合控制器控制左机轮和右机轮的速度均为v
a
,使飞机继续匀速行驶。
[0047]
步骤六、障碍物检测:
[0048]
根据所述飞机地面综合控制系统中的障碍物检测及定位系统获取飞机滑行路径中的障碍物信息以及飞机的当前位置信息。所述障碍物信息包括障碍物的位置、速度、方位。
[0049]
根据获取的障碍物信息确定飞机按照当前速度是否在与障碍物安全距离通过。如果是,则控制飞机按照预定轨迹继续匀速行驶;如果不是,飞机地面综合控制器输出刹车指令,使飞机按照固定减速率刹停。显示障碍物信息并警告。
[0050]
步骤七、飞机的机位停放:
[0051]
根据预定轨迹的停机信息以及获取的廊桥停机坪信息,使飞机停止。
[0052]
根据预定轨迹的停机位置信息,通过控制刹车系统使飞机停止在预定的停机位置,并通过停机执行器锁死机轮。
[0053]
若飞机的未完全达到停机位置,飞机地面综合控制器松刹并驱动飞机前进,驱动飞机进入停机位置;若飞机超过停机位置,飞机地面综合控制器松刹并驱动飞机后退,驱动飞机至预设的停机位置。
[0054]
至此,完成了飞机地面综合控制的全过程。
[0055]
本发明的目的是提供一种飞机地面控制方法及系统,以提高飞机着陆的安全性以及跑道利用率,减轻飞行员的工作负荷,降低飞机的成本。
[0056]
与现有技术相比较,本发明取得的有益效果为:
[0057]
本发明能够实现飞机在地面的减速、加速、转弯、停止功能的综合协同控制如图3所示,达到提高飞机的集成度,提升乘客的舒适性,实现了飞机在地面的智能控制,进而提升了飞机在地面运动的智能化水平;克服了现有飞机在地面运动各系统单独控制的缺陷,减少了飞行员的操纵压力以及操纵时间,消除了飞机在地面运动时各系统协同性差的问题,使飞机在地面自动控制智能化水平得到大幅提升。
[0058]
为验证本发明的效果,对本发明控制系统进行了仿真模拟,并使之该飞机在滑行中右转弯,其模拟结果如图3所示。所述飞机着陆至停止的过程依次分为飞机恒减速阶段11、右侧机轮减速、左侧机轮恒速,实现飞机向右转弯阶12、飞机完成转弯,右侧机轮加速,飞机匀速运动阶段13、遇到障碍物,飞机停止阶段14、无障碍物,飞机自动加速阶段15、飞机匀速运动,实现飞机滑行阶段16和飞机停止阶段。在该仿真模拟中,右侧机轮速度曲线18和左侧机轮速度曲线19显示在飞机向右转弯阶段和飞机完成转弯,右侧机轮加速,飞机匀速运动阶段的运动速度有所差异。
[0059]
所述仿真模拟表明,本发明对跑道信息进行载入,对飞机信息和跑道信息进行了融合计算,在飞机着陆后不仅能够根据跑道的长度自动的实施恒减速率的减速,也可以根据跑道信息自动实施转弯功能,同时,在遇到障碍物时,能够根据飞机与障碍物的距离停止,以及重新加速直至飞机停止到停机位置的功能,在硬件上对飞机制动系统和操纵系统等地面综合控制操纵装置,做到轻量化,集成化,在软件上将机场、气象、机体及多种外部信息有序融合,构建一种智能化、信息化、高效化的软件系统,为飞机的转弯系统、刹车系统以及电滑行系统的集成建立理论基础。
附图说明
[0060]
图1为控制系统结构的结构示意图;
[0061]
图2为本发明控制方法的流程图;
[0062]
图3为本发明控制系统的仿真结果示意图;
[0063]
图4为飞机地面综合控制的流程图。
[0064]
图中:1.飞机地面综合控制器;2.显示模块;3.警告模块;4.记录模块;5.电驱动执行器;6.刹车执行器;7.停机执行器;8.传感器;9.障碍物检测及定位系统;10.机场跑道信息模块;11.飞机恒减速阶段;12.右侧机轮减速、左侧机轮恒速,实现飞机向右转弯阶段;13.飞机完成转弯,右侧机轮加速,飞机匀速运动阶段;14.遇到障碍物,飞机停止阶段;15.无障碍物,飞机自动加速阶段;16.飞机匀速运动,实现飞机滑行阶段;17.飞机停止阶段;18.右侧机轮速度曲线;19.左侧机轮速度曲线。
具体实施方式
[0065]
实施例一
[0066]
所述飞机地面综合控制系统包括飞机地面综合控制器1、显示模块2、警告模块3、记录模块4、和电驱动执行器5、刹车执行器6、停机执行器7、传感器8、障碍物检测及定位系统9和机场跑道信息模块10。
[0067]
其中,所述机场跑道信息模块的输出端与飞机地面综合控制器的第一输入端口联通,飞机地面综合控制器接收机场跑道信息模块发送的跑道信息;所述跑道信息包括:跑道长度、跑道布局、廊桥停机坪位置、跑道粘着系数,所述飞机地面综合控制器第一端口接收信息后通过ad模块进行处理。障碍物检测及定位系统与飞机地面综合控制器的第二输入端口联通;该障碍物检测及定位系统将检测到的飞机的实时位置信息以及跑道范围内的障碍物的位置、速度信息发送到飞机地面综合控制器,该飞机地面综合控制器第二输入端口接收信息后通过ad模块进行处理。传感器的输出端与飞机地面综合控制器的第三输入端口联通,提供机轮速度信号和刹车压力信号。
[0068]
显示模块的输入端与飞机地面综合控制器的第一输出端口联通;该显示模块接收飞机地面综合控制器输出的飞机处于驱动模式、刹车模式、停机模式或转弯模式以及飞机相对跑道的位置信息,用于显示飞机的地面信息。警告模块的输入端与飞机地面综合控制器的第二输出端口联通;该警告模块接收地面综合控制输出的听觉警告信息,包括警报和语音告警。记录模块的输入端与飞机地面综合控制器的第三输出端口联通,通过该记录模块接收并记录飞机地面综合控制器发出的系统信息;所述系统信息包括刹车指令、驱动指令、机轮速度、飞机信息、障碍物信息、停机信息、跑道信息以及故障信息。
[0069]
飞机地面综合控制器的第四输出端口与电驱动执行器的输入端联通。所述飞机地面综合控制器通过驱动电流控制驱动电机,驱动飞机的机轮加速转动。
[0070]
飞机地面综合控制器的第五输出端口与刹车执行器的输入端联通,飞机地面综合控制器通过刹车电流控制刹车执行器,实现机轮刹车。
[0071]
飞机地面综合控制器的第六输出端口与停机执行器的输入端联通,飞机地面综合控制器通过开关量信号控制停机执行器,使飞机实现停机功能。
[0072]
所述飞机地面综合控制器采用现有技术,包括fpga、da模块以及ad模块进行,通过
所述的fpga、da模块以及ad模块接收/传输信息,并通过cpu或dsp实现对获取信息的处理。
[0073]
所述障碍物检测及定位系统包括位置传感器、速度传感器,并采用gps系统或北斗星系统;机场跑道信息模块用于存储机场的跑道信息,对飞机着陆的跑道进行数据匹配,将飞机着陆的跑道信息发送到飞机地面综合控制器;
[0074]
所述刹车执行器为现有技术,包括切断阀、伺服阀和机轮刹车装置。所述电驱动执行器为现有技术,包括电机、离合器、减速装置。停机执行器可与刹车执行器中的设备、液压管路进行合并使用。
[0075]
实施例二
[0076]
本实施例提供了一种用于飞机地面综合控制的方法,具体过程是:
[0077]
步骤一、确定飞机的刹停距离:
[0078]
在判断飞机的刹停距离时,通过机场跑道信息模块,获取跑道的长度、布局、廊桥停机坪位置、跑道粘着系数以及设定着陆轨迹,并根据得到的跑道黏着系数μ以及飞机的着陆速度v,计算刹停飞机所需的刹停距离l
r
。
[0079]
对得到的刹停距离l
r
及跑道长度l
m
进行对比,如果飞机所需的刹停距离大于跑道长度,显示所需的刹停距离,并向飞行员告警;如果停所需的刹距离小于等于跑道长度,则显示刹停飞机所需的距离。
[0080]
通过公式(1)和(2)确定刹停飞机所需的刹停距离l
r
:
[0081]
a
m
=n*μ*g/m
ꢀꢀꢀ
(1)
[0082]
l
r
=v2/2a
m
ꢀꢀꢀ
(2)
[0083]
其中,其中n为起落架个数,g为每个起落架分别承受的重力,m为飞机质量,a
m
为跑道提供的飞机实施的最大减速率。
[0084]
步骤二、实施飞机的恒减速运动:
[0085]
根据得到的跑道长度,计算飞机所需减速率a
t
,按照减速率a
t
控制飞机实施恒减速运动。
[0086]
通过公式(3)计算飞机所需减速率a
t
[0087]
a
t
=2*l
m
/v2ꢀꢀꢀ
(3)
[0088]
通过飞机地面综合控制器,根据所获取的跑道长度l
m
,计算飞机所需减速率a
t
。
[0089]
所述飞机地面综合控制器接收由航姿系统发出的飞机实时减速率a
r
,并计算所述飞机所需减速率a
t
与飞机实时减速率a
r
的差值,进行pid控制,得到实时刹车指令。向控制刹车执行器输出所述的实时刹车指令。通过该刹车执行器控制飞机按照减速率a
t
实施减速,直至飞机进入滑行状态。
[0090]
步骤三、激活电驱动器:
[0091]
飞机地面综合控制器根据传感器检测到的各机轮的速度,通过综合对比各个机轮速度,控制飞机的电驱动执行器的状态。
[0092]
所述综合对比是根据不同的机型选取机轮数量的50%或者75%的机轮,并根据选取机轮的速度进行安全性评估。
[0093]
在进行所述安全性评估时,若有50%或者75%的机轮速度均大于飞机的速度阈值v
e
,则保持电驱动执行器的关闭状态。若有50%或者75%的机轮速度均小于等于飞机的速度阈值v
e
,则激活电驱动执行器,电驱动执行器在接收到驱动指令时,实现加速功能。
[0094]
所述飞机的速度阈值v
e
由飞机设计时提出。本实施例中,所述飞机的速度阈值v
e
为30km/h。
[0095]
步骤四、飞机滑行阶段的控制:
[0096]
当飞机进入滑行道滑行时,根据获取的跑道布局,按照设定滑行路线,使飞机按照预设的滑行速度v
a
行驶。当机轮速度传感器检测到飞机速度降低到v
a
‑
δv以下时,飞机地面综合控制器输出驱动指令,控制电驱动执行器,直到飞机速度达到v
a
,飞机地面综合控制器不再输出驱动指令。反之,当机轮速度传感器检测到飞机速度上升到v
a
+δv以上时,飞机地面综合控制器输出刹车指令,控制刹车执行器,使飞机减速到v
a
,控制器不再输出刹车指令。
[0097]
其中,v
a
为滑行速度,δv为滑行速度偏差值。
[0098]
所述滑行速度v
a
根据不同机型进行设定,为20~30km/h。所述滑行速度偏差值δv为3~5km/h。
[0099]
步骤五、滑行中的转弯控制:
[0100]
获取飞机预定的轨迹转弯信息,包括转弯角度α、转弯起始位置坐标以及终止位置坐标。
[0101]
当飞机在滑行中转弯时,当飞机到达转弯起始位置时,通过控制飞机各主机轮的速度实施转弯。若飞机向左转弯,则飞机左侧机轮减速、右侧机轮加速;若飞机向右转弯,则飞机右侧机轮减速、左侧机轮加速。
[0102]
减速的机轮称为减速机轮,加速的机轮称为加速机轮。
[0103]
在机轮减速或加速时,该机轮的速度满足确定的减速机轮的速度v
b
、加速机轮的速度v
d
。
[0104]
根据公式(4)和公式(5)分别确定减速机轮的速度v
b
、加速机轮的速度v
d
:
[0105][0106][0107]
其中,l
n
为飞机前机轮到主机轮的纵向距离;l
m
为飞机前机轮到主机轮的横向距离;v
a
是飞机转弯速度,α为偏转角度。
[0108]
当飞机到达转弯终止位置时,飞机地面综合控制器控制左机轮和右机轮的速度均为v
a
,使飞机继续匀速行驶。
[0109]
步骤六、障碍物检测:
[0110]
根据所述飞机地面综合控制系统中的障碍物检测及定位系统获取飞机滑行路径中的障碍物信息以及飞机的当前位置信息。所述障碍物信息包括障碍物的位置、速度、方位。
[0111]
根据获取的障碍物信息确定飞机按照当前速度是否在与障碍物安全距离通过。如果是,则控制飞机按照预定轨迹继续匀速行驶;如果不是,飞机地面综合控制器输出刹车指令,使飞机按照固定减速率刹停。显示障碍物信息并警告。
[0112]
步骤七、飞机的机位停放:
[0113]
根据预定轨迹的停机信息以及获取的廊桥停机坪信息,使飞机停止。
[0114]
根据预定轨迹的停机位置信息,通过控制刹车系统使飞机停止在预定的停机位置,并通过停机执行器锁死机轮。
[0115]
若飞机的未完全达到停机位置,飞机地面综合控制器松刹并驱动飞机前进,驱动飞机进入停机位置;若飞机超过停机位置,飞机地面综合控制器松刹并驱动飞机后退,驱动飞机至预设的停机位置。
[0116]
在实施飞机刹车和驱动时,各所述机轮的控制均是独立的,且每个起落架上的机轮在一个时刻只能进行一种控制即驱动或者刹车,不能同时进行刹车及驱动,避免造成电机的损坏。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1