一种卫星掉电故障的自主诊断与处理方法与流程
1.本发明涉及一种卫星掉电故障的自主诊断与处理方法,特别是涉及一种高轨卫星控制系统针对整星短时掉电故障的自主诊断与处理方法,属于航天器故障诊断与处理技术领域。
背景技术:
2.高轨卫星敏感器常规配置为太阳敏感器、星敏感器、陀螺、地球敏感器,gnss也成了越来越多的高轨卫星的标配。高轨卫星在轨长期在正常模式下提供各种服务,如果发生掉电故障,恢复供电后重要数据恢复不成功,传统的处理方式是等待地面测控人员处理,不仅影响到卫星服务的连续性,造成不确定的经济损失,还给地面测控造成很大压力。因此,有必要增强高轨卫星针对整星短时掉电故障的自主诊断及处理能力。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,提供了一种高轨卫星控制系统针对整星短时掉电故障的自主诊断与处理方法,所述方法包括:(1)判断重要数据恢复成功标志、星箭分离标志、轨道标志,进而自主诊断整星同步轨道段掉电故障;(2)设置轨道选用数据,开地球敏感器,设置动量轮转速,转地球指向模式;(3)在地球指向模式下,判断若连续一定周期t0满足gnss轨道数据可用、任一星敏可用、三轴姿态角速度小于一定阈值k0,自主转惯性指向地模式;(4)在惯性指向对地模式处理中,判断若连续一定周期t1满足三轴姿态角小于一定阈值k1,自主转位置保持模式;(5)在位置保持模式处理中,判断若连续一定周期t2满足三轴姿态角小于一定阈值k2,m个动量轮转速控制到位,则自主转正常模式。本发明可以自主诊断并处理整星短时掉电故障,极大提升了卫星的自主性及可靠性。
4.本发明目的通过以下技术方案予以实现:
5.一种卫星掉电故障的自主诊断与处理方法,包括如下步骤:
6.卫星上电后,通过判断确定发生掉电后恢复上电的故障后;设置轨道采用gnss轨道数据,开地球敏感器,设置动量轮转速为标称转速,自主转地球指向模式;
7.在地球指向模式下,连续t0个周期,当gnss轨道数据可用且卫星上的任一星敏可用且卫星的三轴姿态角速度小于阈值k0,自主转惯性指向地模式;
8.在惯性指向对地模式下,连续t1个周期,当所述的三轴姿态角小于阈值k1,自主转位置保持模式;
9.在位置保持模式下,连续t2个周期,当所述的三轴姿态角小于阈值k2,且卫星上的m个动量轮转速控制到标称转速,则自主转正常模式;
10.其中,t0<t1<t2,k2<k1。
11.上述的自主诊断与处理方法,判断发生掉电后恢复上电故障的方法为:
12.对恢复的指定数据的帧头、数据长度、校验和进行判断,如果帧头、数据长度、校验和均正确,则置指定数据恢复成功标志为成功,否则为不成功;
13.根据读取的星箭分离硬件状态判断星箭分离标志是否为已分离;
14.根据加电的动量轮的个数判断轨道标志,如果加电的动量轮的个数大于等于预设值m,则判断为同步轨道,否则判断为转移轨道;
15.当指定数据恢复成功标志为不成功且星箭分离标志为已分离且轨道标志为同步轨道时,判定发生掉电后恢复上电故障。
16.上述的自主诊断与处理方法,k0、k1、k2均根据pid控制器、相应模式下的角速度控制精度要求确定。
17.一种卫星掉电故障的自主诊断与处理装置,包括:
18.地球指向模块,在卫星上电后,通过判断确定发生掉电后恢复上电的故障后;设置轨道采用gnss轨道数据,开地球敏感器,设置动量轮转速为标称转速,自主转地球指向模式;
19.惯性指向地模块,在地球指向模式下,连续t0个周期,当gnss轨道数据可用且卫星上的任一星敏可用且卫星的三轴姿态角速度小于阈值k0,自主转惯性指向地模式;
20.位置保持模块,在惯性指向对地模式下,连续t1个周期,当所述的三轴姿态角小于阈值k1,自主转位置保持模式;
21.正常模式模块,在位置保持模式下,连续t2个周期,当所述的三轴姿态角小于阈值k2,且卫星上的m个动量轮转速控制到标称转速,则自主转正常模式;
22.其中,t0<t1<t2,k2<k1。
23.上述的自主诊断与处理装置,判断发生掉电后恢复上电故障的方式为:
24.对恢复的指定数据的帧头、数据长度、校验和进行判断,如果帧头、数据长度、校验和均正确,则置指定数据恢复成功标志为成功,否则为不成功;
25.根据读取的星箭分离硬件状态判断星箭分离标志是否为已分离;
26.根据加电的动量轮的个数判断轨道标志,如果加电的动量轮的个数大于等于预设值m,则判断为同步轨道,否则判断为转移轨道;
27.当指定数据恢复成功标志为不成功且星箭分离标志为已分离且轨道标志为同步轨道时,判定发生掉电后恢复上电故障。
28.上述的自主诊断与处理装置,k0、k1、k2均根据pid控制器、相应模式下的角速度控制精度要求确定。
29.一种卫星掉电后重新上电转正常模式的方法,采用上述的自主诊断与处理方法。
30.本发明相比于现有技术具有如下有益效果:
31.(1)本发明所述方法可以根据重要数据恢复标志、星箭分离标志、轨道标志,星上标志自主快速诊断出整星短时掉电故障,不需等待地面干预,保证了掉电故障诊断的及时性;
32.(2)本发明所述方法可以在星上自主处理整星短时掉电故障,提高了高轨卫星控制系统的自主性和可靠性,大大减轻了地面测控压力;
33.(3)本发明所述方法适用于配备gnss的高轨卫星,对于卫星控制系统配置的要求低,已在某卫星上成功应用。因此,本发明所述方法具有很广泛的适用范围。
附图说明
34.图1为本发明高轨卫星短时掉电故障的控制系统自主诊断与处理方法;
35.图2为发生掉电后恢复上电故障判断流程;
36.图3为掉电后恢复上电后自主处理流程。
具体实施方式
37.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步详细描述。
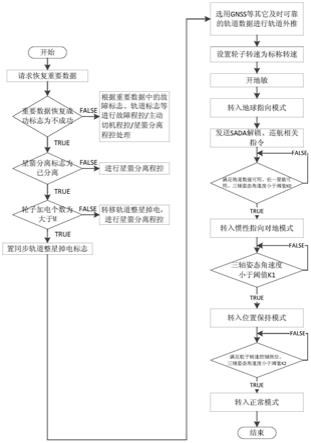
38.本发明提出一种高轨卫星控制系统针对整星短时掉电故障的自主诊断与处理方法。具体包括:卫星恢复供电后判断是否为整星短时掉电故障,如果为整星掉电故障,则设置轨道采用gnss轨道数据,开地球敏感器,设置动量轮转速为标称转速,转地球指向模式,直至卫星自主转入正常模式继续提供服务,总流程如图1所示。
39.本发明的实现方法如下:
40.(1)卫星恢复供电后请求恢复重要数据,对恢复的重要数据进行帧头、数据长度及校验和判断,如果帧头正确且数据长度正确且校验和正确,则置重要数据恢复成功标志为成功,否则为不成功。如果恢复不成功转(2),否则根据恢复的重要数据内容进行故障程控或主动切机程控或星箭分离程控处理(见图2);
41.(2)根据从硬件读取的星箭分离标志判断星箭是否已分离,如果已分离则转(3),否则进入星箭分离程控处理(见图2);
42.(3)根据动量轮加电个数判断卫星轨道标志,如果动量轮加电个数大于等于m,则置卫星轨道标志为同步轨道,否则轨道标志置为转移轨道转(4),进入星箭分离程控处理(见图2);
43.(4)设置整星掉电故障标志为真,后续处理如图3所示;
44.(5)设置轨道采用gnss轨道数据,开地球敏感器,设置动量轮转速为标称转速,转地球指向模式;
45.(6)在地球指向模式下判断若连续t0周期(如200周期,可根据具体卫星设置)满足gnss轨道数据可用、任一星敏可用、三轴姿态角速度小于阈值k0(k0的选择取决于该模式下的角速度控制精度要求,根据pid控制器参数计算而来),自主转惯性指向地模式;
46.(7)在惯性指向对地模式处理中,判断若连续t1周期(如400周期,可根据具体卫星设置)满足三轴姿态角小于阈值k1(k1的选择取决于该模式下的角度控制精度要求,根据pid控制器参数计算而来),自主转位置保持模式。
47.(8)在位置保持模式处理中,判断若连续t2周期(如30000周期,可根据具体卫星设置)满足三轴姿态角小于阈值k2(k2的选择方法与k1相同),m个动量轮转速控制到标称转速,则自主转正常模式。
48.一种卫星掉电故障的自主诊断与处理装置,包括:
49.地球指向模块,在卫星上电后,通过判断确定发生掉电后恢复上电的故障后;设置轨道采用gnss轨道数据,开地球敏感器,设置动量轮转速为标称转速,自主转地球指向模式;
50.惯性指向地模块,在地球指向模式下,连续t0个周期,当gnss轨道数据可用且卫星
上的任一星敏可用且卫星的三轴姿态角速度小于阈值k0,自主转惯性指向地模式;
51.位置保持模块,在惯性指向对地模式下,连续t1个周期,当所述的三轴姿态角小于阈值k1,自主转位置保持模式;
52.正常模式模块,在位置保持模式下,连续t2个周期,当所述的三轴姿态角小于阈值k2,且卫星上的m个动量轮转速控制到标称转速,则自主转正常模式;
53.其中,t0<t1<t2,k2<k1。
54.判断发生掉电后恢复上电故障的方式为:
55.对恢复的指定数据的帧头、数据长度、校验和进行判断,如果帧头、数据长度、校验和均正确,则置指定数据恢复成功标志为成功,否则为不成功;
56.根据读取的星箭分离硬件状态判断星箭分离标志是否为已分离;
57.根据加电的动量轮的个数判断轨道标志,如果加电的动量轮的个数大于等于预设值m,则判断为同步轨道,否则判断为转移轨道;
58.当指定数据恢复成功标志为不成功且星箭分离标志为已分离且轨道标志为同步轨道时,判定发生掉电后恢复上电故障。
59.一种卫星掉电后重新上电转正常模式的方法,采用上述的自主诊断与处理方法。
60.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
61.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1