一种仿生双足机器人的控制方法及仿生双足机器人
1.本发明涉及机器人控制技术领域,尤其涉及的是一种仿生双足机器人的控制方法及仿生双足机器人。
背景技术:
2.与真实的人类和腿式移动的动物相比,机器人在整体的运动灵活性,承载能力,执行多任务,持续长时间运行,自主导航等方面还有很大欠缺,需进一步深入的探究。足式机器人在行走过程中需要面对极其复杂多变的外部环境。因此需要通过简化模型,使控制器能够快速的求解计算运动学、动力学问题,以让机器人具备快速感知外部环境并作出决策的能力,来适应在不同地形下的行走。
3.cassie是一种仿鸵鸟的双足机器人,其设计灵感来自那些可以在地面上奔跑的鸟类,它有14个自由度,其中有4个关节是由板簧组成的被动关节。几乎全铰接的腿式结构能让腿部实现多用途的自主运动,而且当遇到较大冲击时,膝盖和后跟的板簧起到吸收冲击的作用,有利于表现出富有弹性和高动态的运动。该机器人的末端没有直接与驱动器相连,使得机器人末端的惯性较小,从而提高机器人的敏捷性。但是由于仿生双足机器人的自由度高,求解计算运动学和动力学问题需要极大地计算量。在现有技术中,主要集中在步态控制等方面,大部分采用的是非实时系统,无法满足对移动机器人的控制实时性的需求。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种仿生双足机器人的控制方法及仿生双足机器人,旨在解决现有技术中对于仿生双足机器人的控制无法达到实时控制的问题。
6.本发明解决技术问题所采用的技术方案如下:
7.一种仿生双足机器人,所述仿生双足机器人的腿包括通过连杆依次连接的臀机构、膝机构、踝机构和趾机构,所述臀机构、所述膝机构和所述踝机构各包括若干关节,所述趾机构包括趾关节和与所述趾关节相连的脚掌,其中,所述控制方法包括步骤:
8.获取所述仿生双足机器人的移动指令,确定所述仿生双足机器人的腿的初始状态和腿的终点状态;
9.根据所述腿的终点状态,确定所述趾机构中所述趾关节的终点位姿;
10.根据所述腿的初始状态和所述趾关节的所述终点位姿,确定所述臀机构、所述膝机构和所述踝机构中各所述关节的转角;
11.根据各所述关节的转角和所述腿的初始状态,确定所述关节的速度、加速度和力,控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动。
12.所述的仿生双足机器人的控制方法,其中,
13.所述腿的初始状态包括各所述连杆的长度和各所述连杆之间的初始夹角;
14.所述腿的终点状态包括各所述连杆之间的终点夹角、所述脚掌的长度、末端指向和末端坐标,其中所述末端为所述脚掌的末端。
15.所述的仿生双足机器人的控制方法,其中,所述根据所述腿的终点状态,确定所述趾机构中趾关节的终点位姿,具体包括:
16.根据所述末端坐标和所述末端指向,确定所述仿生双足机器人的腿部平面;
17.根据所述腿部平面和各所述连杆的长度,确定所述趾关节的终点位姿。
18.所述的仿生双足机器人的控制方法,其中,所述根据所述末端坐标和所述末端指向,确定所述仿生双足机器人的腿部平面,还包括:
19.根据所述腿部平面和所述腿的初始状态,确定第一关节的转角和第二关节的转角,所述第一关节和所述第二关节设置在所述臀机构中。
20.所述的仿生双足机器人的控制方法,其中,所述根据所述腿部平面,确定所述趾关节的终点位姿,具体包括:
21.将所述末端坐标转换为所述腿部平面的对应坐标;
22.根据所述对应坐标、所述第一关节的转角、所述第二关节的转角和各所述连杆的长度,确定所述趾关节的终点位姿。
23.所述的仿生双足机器人的控制方法,其中,所述根据所述趾关节的所述终点位姿,确定所述臀机构、所述膝机构和所述踝机构中各所述关节的转角,包括:
24.根据所述腿的初始状态、所述腿的终点状态和所述趾关节的所述终点位姿,确定所述臀机构中第三关节的转角;
25.根据所述腿的初始状态、所述腿的终点状态和所述趾关节的所述终点位姿,确定所述膝机构中第四关节的转角;
26.根据所述腿的初始状态、所述腿的终点状态和所述趾关节的所述终点位姿,确定所述踝机构中第五关节的转角。
27.所述的仿生双足机器人的控制方法,其中,所述根据各所述关节的转角和所述腿的初始状态,确定所述关节的速度、加速度和力,控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动,包括:
28.根据所述腿的初始状态,所述第一关节的转角、所述第二关节的转角、所述第三关节的转角、所述第四关节的转角和所述第五关节的转角,确定基于旋量理论的运动学模型;
29.求解所述运动学模型,得到所述仿生双足机器人的运动轨迹;
30.控制各所述关节转动,使得所述仿生双足机器人按照所述运动轨迹移动。
31.所述的仿生双足机器人的控制方法,其中,所述求解所述运动学模型,得到所述仿生双足机器人的运动轨迹,具体包括:
32.利用所述腿的初始状态,确定所述腿的初始位姿矩阵;
33.利用所述第一关节的转角确定所述第一关节的位姿矩阵,利用所述第二关节的转角确定所述第二关节的位姿矩阵,利用所述第三关节的转角确定所述第三关节的位姿矩阵,利用所述第四关节的转角确定所述第四关节的位姿矩阵,以及利用所述第五关节的转角确定所述第五关节的位姿矩阵;
34.将所述第一关节的位姿矩阵,所述第二关节的位姿矩阵,所述第三关的位姿矩阵节,所述第四关节的位姿矩阵,所述第五关节的位姿矩阵和所述腿的初始位姿矩阵连乘,得
到所述仿生双足机器人的运动轨迹。
35.一种仿生双足机器人,包括存储器,处理器,以及通过连杆依次连接的臀机构、膝机构、踝机构和趾机构,所述臀机构、所述膝机构和所述踝机构各包括若干关节,所述趾机构包括趾关节和与所述趾关节相连的脚掌,所述存储器存储有计算机程序,其中,所述处理器执行所述计算机程序时实现以上任一项所述方法的步骤。
36.一种计算机可读存储介质,其上存储有计算机程序,其中,用处理器运行所述计算机程序执行时实现以上任一项所述的方法的步骤。
37.有益效果:本发明通过对所述仿生双足机器人的模型进行简化,利用旋量理论求解出正运动学的显式解析解,利用空间几何求解出逆运动学的显式解析解,从而实现对所述仿生双足机器人的实时控制。
附图说明
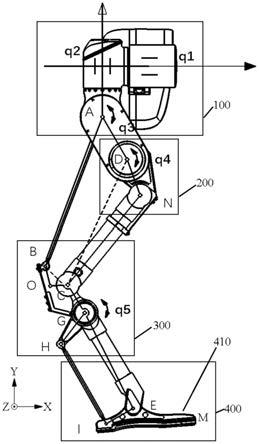
38.图1是本发明一种仿生双足机器人的单腿结构示意图。
39.图2是本发明一种仿生双足机器人的趾机构示意图。
40.图3是本发明所述控制方法的流程图。
具体实施方式
41.为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
42.需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“内”、“外”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的结构必须具有特定的方位或必须以特定的方位来构造,不能理解为对本发明的限制。
43.另外,除非文中对于冠词有特别限定,否则“一”与“所述”可泛指单一个或复数个。本发明实施例中有涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
44.本发明提供了一种仿生双足机器人的控制方法及仿生双足机器人的一些实施例。本发明所述仿生双足机器人为类cassie构型的双足机器人,类cassie构型的双足机器人有14个自由度,其中有4个关节是由板簧组成的被动关节。所述双足机器人包括两条腿。如图1所示,各所述腿包括由连杆依次连接的臀机构100、膝机构200、踝机构300和趾机构400,其中所述趾机构400包括趾关节e和与所述趾关节e相连的脚掌410。所述腿具有5个自由度,分别对应5个主动关节,包括所述臀机构100中的三个主动关节第一关节q1、第二关节q2和第三关节q3,所述膝机构200中的一个主动关节第四关节q4和所述踝机构300中的一个主动关节第五关节q5,在5个所述主动关节处设有电机,通过控制器(未示出)控制各所述主动关节处的电机带动所述主动关节转动。进一步地,所述仿生双足机器人的控制方法中,由所述第一关节q1、所述第二关节q2和所述第三关节q3实现对所述仿生双足机器人臀部的控制,其中由所述第一关节q1控制腿向侧面摆动,由所述第二关节q2控制转动腿的朝向,由所述第三关节
q3控制腿的抬起与放下;由所述第四关节q4实现对所述膝机构200的控制,抬起或放下所述踝机构300和所述趾机构400;由所述第五关节q5实现对所述趾机构400的控制,调整所述脚掌410和所述趾关节e的位姿。通过控制所述第一关节q1、所述第二关节q2、所述第三关节q3、所述第四关节q4和所述第五关节q5的转动,改变连杆与连杆之间的夹角,实现腿的变形,从而实现控制所述仿生双足机器人移动。
45.进一步地,所述仿生双足机器人的腿还包括8个被动关节,所述被动关节辅助连接所述臀机构100、所述膝机构200、所述踝机构300和所述趾机构400,并在控制所述仿生双足机器人移动时辅助调整连杆与连杆之间的夹角,实现腿的变形。具体地,如图1所示,所述被动关节包括第一被动关节b、第二被动关节c、第三被动关节n、第四被动关节o、第五被动关节g、第六被动关节h、第七被动关节i和所述趾关节e,所述臀机构100、所述膝机构200、所述踝机构300和所述趾机构400通过各所述被动关节之间的连杆连接。具体地,所述臀机构100和所述膝机构200通过第一连杆ad相连,所述膝机构200和所述踝机构300通过第二连杆nc相连,所述臀机构100和所述踝机构300通过第三连杆ab、第四连杆bo、第五连杆oc和第六连杆bg相连,所述踝机构300和所述趾机构400通过第七连杆ce、第八连杆gh和第九连杆hi相连。
46.进一步地,所述仿生双足机器人的腿中,在所述第三被动关节n和所述第四被动关节o处的连接部分设置有弹性部件,当所述腿受到冲击时,所述第三被动关节n和所述第一被动关节b会弯曲并吸收来自冲击的大量能量,从而通过降低冲击速度,来减少伤害。由于所述弹性部件的弹性形变会导致运动学模型计算的难度提升,因此需要简化模型,将所述第四被动关节o处(即所述第四连杆bo和所述第五连杆oc)近似为虚线表示的第一虚拟连杆bc,将所述第三被动关节n处(即所述第二连杆nc)近似为虚线表示的第二虚拟连杆dc。
47.如图3所示,本发明提供的仿生双足机器人的控制方法,包括以下步骤:
48.步骤s100、获取所述仿生双足机器人的移动指令,确定所述仿生双足机器人的腿的初始状态和腿的终点状态。
49.具体地,所述仿生双足机器人得到移动指令后,确定所述仿生双足机器人的腿的初始状态和腿的终点状态,包括通过所述仿生双足机器人的初始设置确定所述仿生双足机器人的腿的初始状态,并通过所述移动指令确定所述仿生双足机器人的移动轨迹,最后通过所述腿的初始状态和所述移动轨迹确定腿的终点状态。其中,所述移动轨迹是指所述仿生双足机器人的腿的末端m在空间直角坐标系中的移动轨迹。以图1为例,所述空间直角坐标系以所述仿生双足机器人的前进方向为x轴方向,竖直向上为y轴方向,以所述第四被动关节o为原点,确定xoy平面,同时z轴垂直于图片向外。需说明的,本发明实施例中建立的空间直角坐标系以及所述仿生双足机器人的腿在所述空间直角坐标系中的坐标仅用于展示说明所述仿生双足机器人的控制方法,并不作为对所述仿生双足机器人的控制方法的限定。
50.具体地,所述腿的初始状态包括各所述连杆的长度和各所述连杆之间的初始夹角。通过所述仿生双足机器人的初始设置可以确定各所述连杆的长度和各所述连杆之间的初始夹角,其中各所述连杆的长度在控制所述仿生双足机器人的过程中不会变化。所述腿的终点状态包括各所述连杆之间的终点夹角、所述脚掌的长度、末端指向和末端坐标。其中,所述末端为所述脚掌410的末端m,所述脚掌的长度im即所述末端m位于所述脚掌410中
的位置;所述末端坐标为所述末端m在所述空间直角坐标系中的坐标m(x0,y0,z0);所述末端指向为所述脚掌410在所述空间直角坐标系中的向量
51.步骤s200、根据所述腿的终点状态,确定所述趾机构中所述趾关节的终点位姿。
52.cassie构型的双足机器人的腿式结构的特点是,在运动时胯部以下的所有关节都在同一平面,因此对于所述仿生双足机器人的控制可以简化为计算所述末端m对应在腿部平面中的坐标,从而求出各所述主动关节的转动角度。但是由于所述腿部平面会随着所述臀机构100的运动而改变,因此重点在于判定所述腿部平面。
53.步骤s200具体包括:
54.步骤210、根据所述末端坐标和所述末端指向,确定所述仿生双足机器人的腿部平面。
55.步骤220、根据所述腿部平面和各所述连杆的长度,确定所述趾关节的终点位姿。
56.具体地,众所周知的,通过平面上不平行的两个向量可以求得平面的法向量,利用法向量即可表示所述平面在空间直角坐标系中的平面方程。由于原点(所述第四被动关节o)和所述脚掌410均处于所述腿部平面上,因此连接原点和所述末端得到的向量和所述末端指向均在所述腿部平面上,可以确定所述仿生双足机器人的腿部平面的平面方程。
[0057][0058][0059]
x
a x
m
+y
a y
m
+z
a z
m
=0
ꢀꢀꢀ
(3)
[0060]
其中,为所述腿部平面的法向量,(x
a
,y
a
,z
a
)为所述腿部平面上点的坐标。通过所述腿部平面的平面方程和所述腿的初始状态,确定所述臀机构100中所述第一关节q1的转角和所述第二关节q2的转角。其中,所述腿的初始状态包括各所述连杆的长度和连杆与连杆之间的夹角。
[0061]
具体地,通过所述腿部平面与空间直角坐标系中的yoz平面的交线,确定所述第一关节q1的转角。将x
a
=0代入公式(3)从而求得所述腿部平面与yoz平面的交线方程。
[0062][0063]
其中k为所述交线的斜率,则对于k>0,k=0,k<0,k
→
∞这几种情况可以分别求到所述第一关节q1的转角。令θ1为所述交线与z轴的夹角,以逆时针旋转90
°
为顺时针旋转90
°
为
[0064][0065]
其中z为所述末端m在所述交线上的投影对应在z轴上的值。根据公式(5),即可确定所述第一关节q1的转角,即所述仿生双足机器人的腿向侧面摆动的角度。
[0066]
进一步地,要确定所述第二关节q2的转角,需要先判断所述末端m在yoz平面上的投影与所述交线的关系。从x轴正向看去,所述末端m在yoz平面上的投影与所述交线的关系分为落在所述交线的左边(位于左边)、落在所述交线的右边(位于右边)以及落在所述交线上(q2=0)。当所述末端m在yoz平面上的投影落在所述交线上时,q2=0,即所述第二关节q2没有转动。
[0067]
当或时,
[0068][0069]
当时
[0070][0071]
当θ1=0时,
[0072][0073]
当时
[0074][0075]
当所述末端m与所述交线的位置关系不同时,需要用不同的方式计算所述第二关节q2的转角。设点n为所述末端m在yoz平面上的投影,过点n做所述交线的垂线与所述交线交于点p,通过∠mpn即可确定所述第二关节q2的转角。而∠mpn可以利用空间几何关系通过∠nop确定。连接原点o与点n,令θ2为no与z轴的夹角,根据θ1的不同,∠nop需要通过不同的公式确定。
[0076][0077]
利用三角函数即可确定∠mpn。
[0078]
np=no sin∠nop
ꢀꢀꢀ
(11)
[0079][0080]
其中,np为点n与点p的距离,mn为所述末端m与点n的距离,no为原点o与点n的距离。
[0081]
所述末端m在yoz平面上的投影与所述交线的关系不同时,需要通过不同的公式确定所述第二关节q2的转角。当所述末端m在yoz平面上的投影落在所述交线上时,q2=0,即所述第二关节q2没有转动。当所述末端m在yoz平面上的投影落在所述交线的右边时:
[0082]
[0083]
当所述末端m在yoz平面上的投影落在所述交线的左边时,计算方式稍有变化,但原理相同:
[0084][0085]
这样就根据所述腿部平面和所述腿的初始状态,确定了所述第一关节q1的转角和所述第二关节q2的转角。利用简单的几何关系即可求解,使得计算更加方便快捷,有利于所述仿生双足机器人的实时控制。
[0086]
进一步地,通过所述腿部平面确定所述趾关节的终点位姿。其中,为了降低计算的复杂度,首先需要将所述末端坐标转换为所述腿部平面的对应坐标。设依照所述腿部平面建立的平面直角坐标系为x0oy0平面,原点o与所述空间直角坐标系一致,x0轴与x轴一致,所述末端m在x0oy0平面上的末端坐标为m(x
’0,y
’0,z
’0)。当q1=0时,y0轴与y轴一致;当q1不为0时,y0轴为y轴转动q1后的新轴。此时,当q2=0时,x
’0=x,y
’0=
‑
no;当q2≠0时,
[0087]
利用所述末端m在x0oy0平面上的末端坐标m(x
’0,y
’0,z
’0),即可确定所述趾关节e的所述终点位姿e(x1,y1)。如图2所示,沿所述第七被动关节i做x0轴的水平线,过所述趾关节e和所述末端m做所述水平线的垂线与所述水平线的交点为点j和点l,过所述趾关节e做im的垂线与im的交点为点k。根据几何关系,确定不同情况下所述趾关节e的所述终点位姿e(x1,y1)。
[0088]
[0089]
其中为所述交线的斜率,b和c为所述末端指向的值,通过几何关系计算即可确定所述趾关节e的所述终点位姿,从而利用所述趾关节e的所述终点位姿进一步确定所述主动关节的转角,计算方便快捷,有利于所述仿生双足机器人的实时控制。
[0090]
步骤s300、根据所述腿的初始状态和所述趾关节的所述终点位姿,确定所述臀机构、所述膝机构和所述踝机构中各所述关节的转角。
[0091]
由于在所述第三被动关节n和所述第四被动关节o处的连接部分设置有弹性部件,而所述弹性部件在吸收冲击后的弹性形变会导致运动学模型计算的难度提升,因此需要简化模型,将所述第四被动关节o处(即所述第四连杆bo和所述第五连杆oc)近似为虚线表示的第一虚拟连杆bc,将所述第三被动关节n处(即所述第二连杆nc)近似为虚线表示的第二虚拟连杆dc。对于本发明所述仿生双足机器人,所述第三关节q3、所述第四关节q4和所述第五关节q5在运动时均保持在所述腿部平面中,通过所述腿部平面再结合所述腿的初始状态和所述趾关节的所述终点位姿,从而确定所述第三关节q3的转角、所述第四关节q4的转角以及所述第五关节q5的转角。
[0092]
具体地,步骤s300包括:
[0093]
步骤s310、根据所述腿的初始状态、所述腿的终点状态和所述趾关节的所述终点位姿,确定所述臀机构中第三关节q3的转角。
[0094]
步骤s320、根据所述腿的初始状态、所述腿的终点状态和所述趾关节的所述终点位姿,确定所述膝机构中第四关节q4的转角。
[0095]
步骤s330、根据所述腿的初始状态、所述腿的终点状态和所述趾关节的所述终点位姿,确定所述踝机构中第五关节q5的转角。
[0096]
其中,设所述趾关节e在y0轴的投影为点f,在所述腿的初始状态下的∠dao为q
30
,根据所述趾关节e的所述终点位姿e(x1,y1)相对于y0轴位置的区别,分别利用三角函数确定各所述连杆之间的夹角。
[0097][0098]
通过公式(16)确定q
30
后,则可以利用几何关系确定所述第三关节q3的转角。
[0099]
q3=π
‑
∠daf
‑
q
30
ꢀꢀꢀ
(17)
[0100]
同理,所述第四关节q4的转角也是利用三角函数以及几何关系确定。
[0101][0102]
进一步地,过所述趾关节e做与x0轴平行的第二水平线,设所述第七连杆ce与所述第二水平线偏x0轴负方向形成的角为θ3,同时设所述脚掌410上的连线ei与所述第二水平线偏x0轴负方向形成的角为θ4。分别利用三角函数和几何关系确定θ3和θ4。
[0103][0104][0105]
其中x1通过所述趾关节e的所述终点位姿e(x1,y1)确定,为所述交线的斜率,b和c为所述末端指向的值。
[0106]
通过θ3和θ4,则可确定∠gei=θ3+θ4,通过∠gei可以利用三角函数确定∠egh。
[0107]
由于所述脚掌410的控制机构是一个四杆机构(所述第七连杆ce,所述第八连杆gh,所述第九连杆hi以及所述脚掌410上的连线ei),所以∠gei存在最大值和最小值。当所述第八连杆gh和所述第九连杆hi在同一直线时,∠gei此时最大∠gei此时最小;当所述第九连杆hi和所述脚掌410上的连线ei在同一直线时,∠gei此时最小∠gei此时最大。当∠gei的值大于最大值时,则取最大值;同理,当∠gei的值小于最小值,取最小值。两极值可通过三角函数求出。设q
50
为所述腿的初始状态下∠egh的值。通过几何关系可确定所述第五关节q5的转角。
[0108]
q5=∠egh
‑
q
50
ꢀꢀꢀ
(21)
[0109]
经过以上步骤,所述第一关节q1的转角、所述第二关节q2的转角、所述第三关节q3的转角、所述第四关节q4的转角以及所述第五关节q5的转角已经全部确定,且是显示解析解。通过三角函数、几何关系以及简单的计算即可确定针对特定移动指令,所述仿生双足机器人所有主动关节的转角的显示解析解,计算简单快捷,有利于所述仿生双足机器人的实时控制。
[0110]
步骤s400、根据各所述关节的转角和所述腿的初始状态,确定所述关节的速度、加速度和力,控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动。
[0111]
具体地,根据所述第一关节q1的转角、所述第二关节q2的转角、所述第三关节q3的转角、所述第四关节q4的转角以及所述第五关节q5的转角,确定所述主动关节中相应电机的工作过程,通过所述电机的工作过程和所述腿的初始状态,确定所述第一关节q1、所述第二关节q2、所述第三关节q3、所述第四关节q4以及所述第五关节q5的速度、加速度和力,从而通过对应各所述关节的所述电机控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动。
[0112]
进一步地,所述仿生双足机器人的控制方法在步骤s400之后还包括:
[0113]
步骤s500、根据所述腿的初始状态,所述第一关节的转角、所述第二关节的转角、所述第三关节的转角、所述第四关节的转角和所述第五关节的转角,确定基于旋量理论的运动学模型。
[0114]
步骤s600、求解所述运动学模型,得到所述仿生双足机器人的运动轨迹;
[0115]
步骤s700、控制各所述关节转动,使得所述仿生双足机器人按照所述运动轨迹移
动。
[0116]
首先,为了避免在所述第三被动关节n和所述第四被动关节o处的弹性部件提升计算难度,将所述第四被动关节o处(即所述第四连杆bo和所述第五连杆oc)近似为虚线表示的第一虚拟连杆bc,将所述第三被动关节n处(即所述第二连杆nc)近似为虚线表示的第二虚拟连杆dc;其次,尽管所述仿生双足机器人的腿部构型属于串联机构,但其中也有并联机构的特征,例如类四连杆abcd结构,当所述第四关节q4转动而其他主动关节不动时,四边形abcd会发生变形,使得所述脚掌410提起和放下,此时所述第二被动关节c随着四边形abcd的变化而移动,且所述第七连杆ce绕着所述第二被动关节c转动,为了进一步简化模型,将所述第三连杆ab和所述第一虚拟连杆bc省去,将所述第二被动关节c看作一个主动关节,从而可以将整条腿看作串联连接。经过对所述仿生双足机器人的模型简化,可以大大地降低所述仿生双足机器人的控制方法的计算难度。
[0117]
具体地,通过旋量理论,根据各所述主动关节的位置及轴线方向确定各关节的位姿矩阵,以所述腿的初始状态为初始坐标系,以所述腿的终点状态为终点坐标系,确定运动学模型:
[0118][0119][0120][0121]
其中r为两个坐标系之间的旋转矩阵,为两个坐标系之间的平移向量,θ1为两个坐标系之间的旋转角度,p0是所述腿的初始位姿矩阵,p所述腿的终点位姿矩阵,为所述第一关节q1的位姿矩阵,为所述第二关节q2的位姿矩阵,为所述第三关节q3的位姿矩阵,为所述第四关节q4的位姿矩阵,为所述第二被动关节c的位姿矩阵,为所述趾关节e的位姿矩阵。具体地,利用所述末端m的初始位姿计算p0,利用所述末端m的终点位姿计算p,利用所述第四关节q4的转角计算中的转动角度,利用所述第五关节q5的转角计算的转动角度。
[0122]
通过将所述第一关节的位姿矩阵,所述第二关节的位姿矩阵,所述第三关的位姿矩阵节,所述第四关节的位姿矩阵,所述第五关节的位姿矩阵和所述腿的初始位姿连乘,得到所述仿生双足机器人的运动轨迹。控制控制各所述关节转动,使得所述仿生双足机器人按照所述运动轨迹移动,从而实现对所述仿生双足机器人的控制。这样计算得到的依然是显示解析解,计算简单快捷,有利于实时控制所述仿生双足机器人。进一步地,所述控制方法可以推广至四足机器人、六足机器人等其他移动机器人。
[0123]
基于上述任意一实施例的仿生双足机器人的控制方法,本发明还提供了一种仿生双足机器人的实施例:
[0124]
本发明实施例的仿生双足机器人,包括存储器,处理器,以及通过连杆依次连接的臀机构、膝机构、踝机构和趾机构,所述臀机构、所述膝机构和所述踝机构各包括若干关节,所述趾机构包括趾关节和与所述趾关节相连的脚掌,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如下步骤:
[0125]
获取所述仿生双足机器人的移动指令,确定所述仿生双足机器人的腿的初始状态
和腿的终点状态;
[0126]
根据所述腿的终点状态,确定所述趾机构中所述趾关节的终点位姿;
[0127]
根据所述腿的初始状态和所述趾关节的所述终点位姿,确定所述臀机构、所述膝机构和所述踝机构中各所述关节的转角;
[0128]
根据各所述关节的转角和所述腿的初始状态,确定所述关节的速度、加速度和力,控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动。
[0129]
通过对所述仿生双足机器人的模型进行特定的简化,利用旋量理论求解正运动学的显示解析解,利用空间几何求解逆运动学的显示解析解,利用简便的方法即可求得显示解,从而在更短的时间内完成相关计算和规划,使得对所述仿生双足机器人可以实现实时控制。
[0130]
基于上述任意一实施例的仿生双足机器人的控制方法,本发明还提供了一种计算机可读存储介质的实施例:
[0131]
本发明实施例的计算机可读存储介质,其上存储有计算机程序,用处理器运行所述计算机程序执行时实现以下步骤:
[0132]
获取所述仿生双足机器人的移动指令,确定所述仿生双足机器人的腿的初始状态和腿的终点状态;
[0133]
根据所述腿的终点状态,确定所述趾机构中所述趾关节的终点位姿;
[0134]
根据所述腿的初始状态和所述趾关节的所述终点位姿,确定所述臀机构、所述膝机构和所述踝机构中各所述关节的转角;
[0135]
根据各所述关节的转角和所述腿的初始状态,确定所述关节的速度、加速度和力,控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动。
[0136]
综上所述,本发明公开了一种仿生双足机器人的控制方法、仿生双足机器人及计算机可读存储介质。所述仿生双足机器人的腿包括通过连杆依次连接的臀机构、膝机构、踝机构和趾机构,所述臀机构、所述膝机构和所述踝机构各包括若干关节,所述趾机构包括趾关节和与所述趾关节相连的脚掌,所述控制方法包括步骤:获取所述仿生双足机器人的移动指令,确定所述仿生双足机器人的腿的初始状态和腿的终点状态;根据所述腿的终点状态,确定所述趾机构中所述趾关节的终点位姿;根据所述腿的初始状态和所述趾关节的所述终点位姿,确定所述臀机构、所述膝机构和所述踝机构中各所述关节的转角;根据各所述关节的转角和所述腿的初始状态,确定所述关节的速度、加速度和力,控制各所述关节转动,使得所述仿生双足机器人按照所述移动指令移动。通过对所述仿生双足机器人的模型进行简化,利用旋量理论求解出正运动学的显式解析解,利用空间几何求解出逆运动学的显式解析解,从而实现对所述仿生双足机器人的实时控制。
[0137]
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1