一种适用于狭长航道的无人艇航线规划方法与流程
1.本发明属于无人艇智能航行领域,特别涉及一种适用于狭长航道的无人艇航线规划方法。
背景技术:
2.无人艇因其模块化、无人化和智能化等特点,不仅应用于军事领域,而且广泛应用于海洋环境监测、搜救等民用领域。航线规划是无人艇自主航行技术的核心内容,是无人艇轨迹跟踪和运动控制的基础,其主要目的是按照任务的需要在已知的静态环境下规划出一条最优安全航线,提供宏观的路径指导。无人艇在进入任务水域之前,会按照规划好的航线进行航行,在航行过程中通过艇载传感器获取周围的环境信息,进行局部航线的调整,最终沿着既定航线到达指定的目标点。目前国内外对无人艇航线规划问题做了很多研究并取得了很多成果,但针对狭长航道应用场景的研究较少。
3.狭长航道散布于国内外江河及海上的狭水道,具有曲率半径小、航道宽度窄、斜流较强等特点,是无人艇航行的困难航段。狭长航道相对于开阔水域更加复杂,航行环境受到水域岸线等因素的限制,航行范围比较狭窄,因此对无人艇在狭长航道的航线规划提出了更高的要求。a*算法是一种应用广泛的启发式搜索算法,采用一个代价函数来选择和指导扩展节点,代价函数包含启发函数和实际路径代价,结合了深度优先搜索和广度优先搜索的优点,可用于解决小范围水域内的航线规划问题,但是该算法具有启发性和贪婪性的特点,搜索路径可能会沿着水域岸线、障碍物等的边缘,没有预留安全距离,并且基于电子航道图建立栅格环境模型,规划出的航路点受到栅格限制,航线平滑度不满足无人艇航行控制要求,对于无人艇而言是难以执行的。
技术实现要素:
4.本发明的目的是根据给定狭长航道的先验边界数据,通过计算机自动计算分析,在航道内任意两点之间规划出一条无人艇可执行的安全航线的适用于狭长航道的无人艇航线规划方法。
5.本发明的上述目的通过如下技术方案来实现:
6.一种适用于狭长航道的无人艇航线规划方法,其特征在于:包括如下步骤:
7.步骤1、进行航道数据预处理,提取航道左右两岸边界离散点的坐标信息;
8.步骤2、以步骤1提取的离散点坐标数据为连线端点,以岸线为约束边建立delaunay三角网,形成三角形边的集合,从三角形边的集合中去除包含于单侧约束岸边上的三角形边,求取剩下的各条三角形边上的特征点,按照航道的方向对各特征点进行排序并依次连接,得到航道特征线;
9.步骤3、利用面积法对得到的航道特征线进行优化,从航道特征线的起点开始,依据矢量外积的模的一半是两个矢量构成三角形的面积这一原理,通过计算出的累计面积值判断选出特征线上必要的转弯航路点,最后从航道特征线去除冗余的航路点,重新按照航
道的方向对保留的各特征点进行排序并依次连接,得到优化后的航道特征线,该优化后的航线作为无人艇的实际航线。
10.进一步的:步骤2中,剩下的各条三角形边上的特征点选取各边的中点或各条三角形边上距离右舷岸线1/4宽的点。
11.进一步的:步骤3的具体步骤为:
12.步骤3.1、从航道特征线的起点开始,依次向后取连续的三个航路点,计算当前三个航路点构成三角形的面积;
13.步骤3.2、将计算得到的面积与设定的阈值进行比较,若计算得到的面积大于给定阈值,则判断中间航路点是必要的转弯航路点并保存,三个航路点同步依次向后推移一位,同时将计算面积清零,并继续进行三角形面积计算和判读;若计算得到的面积小于等于给定阈值,则判断中间的航路点是非必要的转弯航路点并删除中间航路点,后面两个航路点依次向后推移一位,前面一航路点保持不变,在计算面积进行累加的情况下,继续进行三角形面积计算和判读,直至累加面积大于给定阈值后,三个航路点顺序同步后移;
14.步骤3.3、重复上述步骤2操作直至遍历完所有航路点为止;
15.步骤3.4、按照航道方向将航道特征线的起点、所有保留的必要转弯航路点、终点依次连线,构成优化后的航道特征线。
16.本发明具有的优点和积极效果:
17.1、本发明方法基于航道左右两岸边界数据,在步骤2中通过建立约束条件下delaunay三角网获取航道特征线,根据狭长航道的不同地理特征规划航线,考虑了预留无人艇与岸线之间的安全距离,适用于解决狭窄航行环境下的无人艇航线规划问题。
18.2、本发明方法在步骤3中利用面积法对提取的航道特征线进行优化,通过删除冗余航路点,改善了狭长航道内规划航线的平滑度,优化后的航线可以作为无人艇实际可执行航线。另外,本发明航线优化算法的时间复杂度为o(n),其中n为航路点个数,提高了航线优化效率。
附图说明
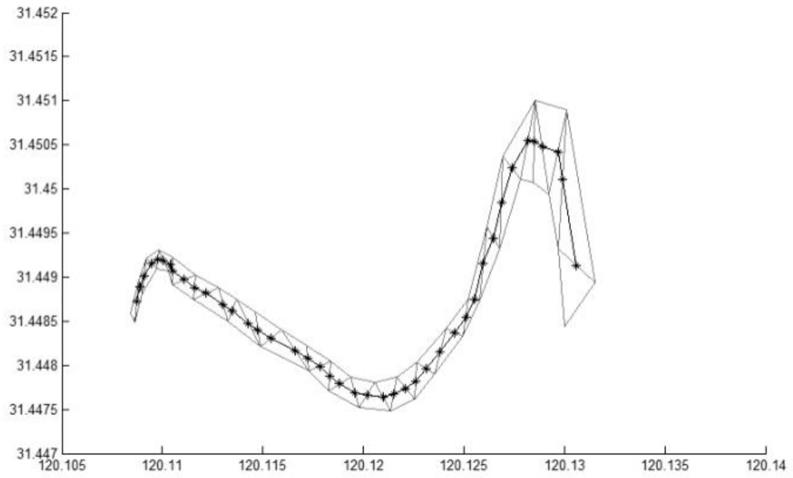
19.图1为本发明实施例生成的优化前航道特征线;
20.图2为本发明实施例生成的优化后航道特征线。
具体实施方式
21.以下结合附图并通过实施例对本发明的结构作进一步说明。需要说明的是本实施例是叙述性的,而不是限定性的。
22.一种适用于狭长航道的无人艇航线规划方法,包括以下步骤:
23.步骤1、航道数据预处理,提取航道左右两岸边界离散点的坐标信息(即点的经纬度)。具体的,根据实际航道的走向及不同应用场景,可从电子海图、地图上或其他载体上提取岸边点的坐标信息数据。
24.步骤2、基于delaunay三角形骨架线进行航道特征线的提取。
25.具体步骤为:
26.2.1以步骤1提取的离散点坐标数据为连线端点,以岸线为约束边建立delaunay三
角网,确保delaunay三角网建立在狭长航道内部;
27.2.2三角网建立之后获得的三角形边有两种,一种是边的两点分别位于左右岸线约束边上,另一种是边包含于单侧岸线约束边上,针对上述两种情况,从三角形边的集合中去除包含于单侧岸线约束边上的三角形边;
28.2.3求取剩下的各条三角形边上的特征点,按照航道的方向对各特征点进行排序并依次连接,得到航道特征线。狭长航道根据是否实施分道通航、风浪流、航道水深等影响因素需要制定不同的航道特征线,例如求取各条边的中点连接组成航道特征线(该位置的航道特征线也可称为航道中心线),或者求取各条边距离右舷岸线1/4宽的特征点连接组成航道特征线,也可根据具体的情况,求取各条边距离右舷岸线其他距离宽的特征点连接组成航道特征线。本实施例以航道中心线为例。
29.步骤3、利用面积法对提取的航道中心线进行优化,从航道中心线的起点开始,依据矢量外积的模的一半是两个矢量构成三角形的面积这一原理,通过计算出的累计面积值判断选出中心线上必要的转弯航路点,最后从航道中心线去除冗余的航路点,优化后的航线作为无人艇的实际航线。
30.所述步骤3的具体步骤包括:
31.3.1从航道中心线的起点开始,依次向后取连续的三个航路点p0、p1、p2,可以组成两个矢量p0p1、p0p2,计算出当前三个航路点构成三角形的面积s,即p0p1、p0p2矢量外积的模的一半;
32.3.2若三角形的面积s大于给定阈值,则判断p1是必要的转弯航路点并保存,p0、p1、p2依次向后推移一位继续判断,同时s清零;若三角形的面积s小于等于给定阈值,则从中心线中删除p1航路点,p1、p2依次向后推移一位继续判断,p0保持不变,面积s累加计算不清零,直至累加面积大于给定阈值后,p0、p1、p2依次同步向后推移计算;
33.(3)重复上述(2)操作直至p2推移到终点为止;
34.(4)顺序连接航道中心线的起点、所有保留的必要转弯航路点、终点,形成优化后的航道中心线,将该优化后的航道中心线作为无人艇的最终执行航线。
35.本发明的效果可通过以下仿真实验作进一步说明:
36.以国内某河道实际岸线数据为基础,利用本发明方法提取河道中心线,见图1,并优化删除冗余航路点,优化后的航线见图2。
37.从图1和图2可以看出,本发明方法能够在狭长航道中的两点间规划出一条切实可行的无人艇航线,计算复杂度低、规划效率高。
38.尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神范围内,各种替换、变化和修改都是可以的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1