一种机器人沿边路径规划方法、装置、机器人及存储介质与流程
本发明涉及机器人路径规划,具体涉及一种机器人沿边路径规划方法、装置、机器人及存储介质。
背景技术:
1、机器人在对设定的清扫区域边界进行沿边清扫过程中,很容易受到环境中的动态障碍物的扰动(例如,在家庭中活动的人或者动物等),从而沿边至孤立障碍物上,形成闭环,导致机器人轨迹混乱,清扫效率低。
技术实现思路
1、本发明的目的是针对上述现有技术的不足提出的一种机器人沿边路径规划方法、装置、机器人及存储介质,该目的是通过以下技术方案实现的。
2、本发明的第一方面提出了一种机器人沿边路径规划方法,所述方法包括:
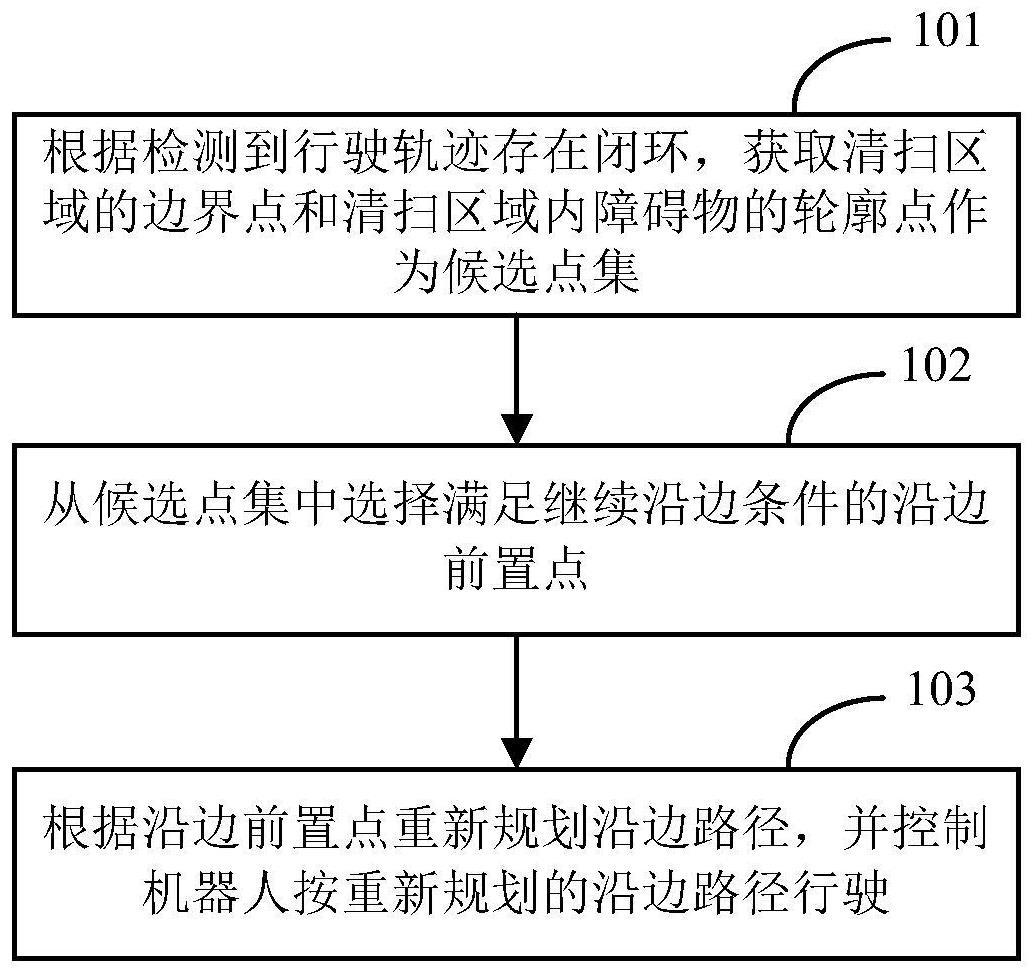
3、根据检测到行驶轨迹存在闭环,获取清扫区域的边界点和所述清扫区域内障碍物的轮廓点作为候选点集;
4、从所述候选点集中选择满足继续沿边条件的沿边前置点;
5、根据所述沿边前置点重新规划沿边路径,并控制所述机器人按重新规划的沿边路径行驶。
6、在本申请的一些实施例中,所述获取清扫区域的边界点和所述清扫区域内障碍物的轮廓点作为候选点集,包括:
7、根据激光地图和环境地图获取清扫区域的边界点和所述清扫区域内每个障碍物的轮廓点簇;将轮廓点数量小于预设数量的轮廓点簇过滤掉;将剩余的轮廓点簇包括的轮廓点和获取的清扫区域的边界点作为候选点集。
8、在本申请的一些实施例中,所述从所述候选点集中选择满足继续沿边条件的沿边前置点,包括:
9、获取所述机器人当前产生的部分轨迹点;针对候选点集中的每一候选点,确定该候选点与每个轨迹点之间的距离;从所述候选点集中,选择距离位于预设范围内的候选点;针对选择的每一候选点,从所述候选点与每个轨迹点之间的距离中选出最小距离,并根据所述最小距离和所述最小距离对应的轨迹点对所述候选点进行评分;根据所述评分从选择的候选点中选取一个候选点作为满足继续沿边条件的沿边前置点。
10、在本申请的一些实施例中,所述根据所述评分从选择的候选点中选取一个候选点作为满足继续沿边条件的沿边前置点,包括:
11、从所述评分中选取评分最低的候选点作为满足继续沿边条件的沿边前置点。
12、在本申请的一些实施例中,所述根据所述最小距离和所述最小距离对应的轨迹点对所述候选点进行评分,包括:
13、利用所述最小距离确定所述候选点的距离得分;在环境地图中确定包含所述候选点和所述最小距离对应的轨迹点的区域;根据所述区域内的障碍物确定所述候选点的空闲指数;根据所述区域内包含的轨迹点确定所述候选点的探索指数;根据所述距离得分、所述空闲指数、以及所述探索指数,确定所述候选点的评分。
14、在本申请的一些实施例中,所述根据所述区域内的障碍物确定所述候选点的空闲指数,包括:
15、确定所述区域内的障碍物占所述区域的面积比例;根据所述面积比例确定所述空闲指数。
16、在本申请的一些实施例中,所述根据所述区域内包含的轨迹点确定所述候选点的探索指数,包括:
17、确定所述区域包含的轨迹点占所述区域的面积比例;根据所述面积比例确定所述探索指数。
18、在本申请的一些实施例中,所述根据所述距离得分、所述空闲指数、以及所述探索指数,确定所述候选点的评分,包括:
19、将所述距离得分、所述空闲指数、以及所述探索指数进行加权求和,得到所述候选点的评分。
20、本发明的第二方面提出了一种机器人沿边路径规划装置,所述装置包括:
21、候选点获取模块,用于根据检测到行驶轨迹存在闭环,获取清扫区域的边界点和所述清扫区域内障碍物的轮廓点作为候选点集;
22、筛选模块,用于从所述候选点集中选择满足继续沿边条件的沿边前置点;
23、路径规划模块,用于根据所述沿边前置点重新规划沿边路径,并控制所述机器人按重新规划的沿边路径行驶。
24、本发明的第三方面提出了一种机器人,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一方面所述方法的步骤。
25、本发明的第四方面提出了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述第一方面所述方法的步骤。
26、基于上述第一方面和第二方面所述的机器人沿边路径规划方法及装置,本发明至少具有如下有益效果或优点:
27、当机器人沿边至孤立障碍物上形成闭环时,通过获取清扫区域的边界点和清扫区域内障碍物的轮廓点作为候选点集,并从候选点集中选择满足继续沿边条件的沿边前置点,从而根据沿边前置点重新规划沿边路径,并控制机器人按新的沿边路径行驶,以使机器人能够继续进行沿边,避免机器人轨迹混乱,从而达到提升机器人清扫效率的目标。
技术特征:
1.一种机器人沿边路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取清扫区域的边界点和所述清扫区域内障碍物的轮廓点作为候选点集,包括:
3.根据权利要求1所述的方法,其特征在于,所述从所述候选点集中选择满足继续沿边条件的沿边前置点,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述评分从选择的候选点中选取一个候选点作为满足继续沿边条件的沿边前置点,包括:
5.根据权利要求3所述的方法,其特征在于,所述根据所述最小距离和所述最小距离对应的轨迹点对所述候选点进行评分,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述区域内的障碍物确定所述候选点的空闲指数,包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述区域内包含的轨迹点确定所述候选点的探索指数,包括:
8.根据权利要求5所述的方法,其特征在于,所述根据所述距离得分、所述空闲指数、以及所述探索指数,确定所述候选点的评分,包括:
9.一种机器人沿边路径规划装置,其特征在于,所述装置包括:
10.一种机器人,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-8任一项所述方法的步骤。
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-8任一项所述方法的步骤。
技术总结
本发明公开了一种机器人沿边路径规划方法、装置、机器人及存储介质,方法包括:根据检测到行驶轨迹存在闭环,获取清扫区域的边界点和所述清扫区域内障碍物的轮廓点作为候选点集;从所述候选点集中选择满足继续沿边条件的沿边前置点;根据所述沿边前置点重新规划沿边路径,并控制所述机器人按重新规划的沿边路径行驶。当机器人沿边至孤立障碍物上形成闭环时,通过获取清扫区域的边界点和清扫区域内障碍物的轮廓点作为候选点集,并从候选点集中选择满足继续沿边条件的沿边前置点,从而根据沿边前置点重新规划沿边路径,并控制机器人按新的沿边路径行驶,以使机器人能够继续进行沿边,避免机器人轨迹混乱,从而达到提升机器人清扫效率的目标。
技术研发人员:任纪颖,王聪,周孙春,邵林
受保护的技术使用者:美智纵横科技有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!