一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法与流程
1.本发明涉及旋翼无人机编队控制技术领域,具体为一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法。
背景技术:
2.编队队形控制是多旋翼无人机系统研究的核心问题,无人机在执行任务时需要保持一定的队形,或者需要在特定的时间进行队形的切换和重构,这依赖于可靠的编队控制策略。
3.传统虚拟结构法的主要思想是将无人机编队系统的队形组成看作是刚性的虚拟结构,在无人机编队飞行运动期间,单个无人机个体可以看作是固定在虚拟结构上的固定位置上,一旦无人机编队队形发生改变,编队系统中的无人机个体直接跟踪保持虚拟结构上的固定坐标点就可以完成设定好的编队飞行巡检路线,无人机跟踪虚拟结构质点即可达到协同控制的目的,该方法能够很好的进行集群拓扑保持,相较于其他协同控制方法,虚拟结构法对队形约束最强,不过该方法很大程度上受限于形成的队形限制,避障、防碰撞不够方便,而无人机之间的保持和避碰控制,能够有效的解决这个问题,可以使无人机在保持编队的时候防止无人机相互碰撞,然而,在虚拟结构法的基础上加入避碰和保持编队控制,一方面是优化了分布式控制方法的编队系统飞行效果,另一方面则是即使编队无人机系统中的某个个体出现故障导致编队系统中的个体缺失,对系统整体的影响也较小,并可以实时的补充上其他无人机个体,让编队系统快速恢复正常的工作状态。
4.目前无人机编队主要有集中式控制方法、分布式控制方法、分散式控制方法这三种控制方式,其中,集中式控制方法的飞行效果较好,能做出科学的飞行决策和路线,但是不易实现,在无人机个体之间都需要进行多个通信,需要互相传递较为多的数据信息,对无人机个体的计算速度以及内存都要求比较高,数据量较大还会导致无人机产生丢失关键信息的问题,分布式控制方法中无人机编队系统中的个体只需要和领域的无人机进行通信,通信数据包以及通信链路都比较少,但飞行效果会差一些,分散式控制方法的编队系统计算量更小,但其带来的编队飞行效果是极差的,由于编队系统中的无人机个体不相互通信,可能会带来无人机之间的碰撞从而发生严重事故。
5.为此,我们提出一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法。
技术实现要素:
6.鉴于上述和/或现有一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法中存在的问题,提出了本发明。
7.因此,本发明的目的是提供一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法,通过采用虚拟结构法对多架无人机构建一个虚拟刚体结构体,定义虚刚体的构型,再通过对无人机设置安全距离,能够解决上述提出现有的问题。
8.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
9.一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法,其包括:以下操作步骤:
10.s1:根据虚拟结构法拟定的坐标系设定集群中的m架无人机需要形成的编队构型为b
ω
=[(x'1,y'1,z'1)(x'2,y'2,z'2)...(x'm,y'm,z'm)],当前状态下的m架无人机为位置分布设为a
ω
=[(x1,y1,z1)(x2,y2,z2)...(xm,ym,zm)],初始状态下的虚拟几何构型中心为(x0,y0,z0);
[0011]
s2:旋翼无人机编队保持方法:
[0012]
步骤一:构建旋翼无人机一阶保持控制器模型;
[0013]
步骤二:在惯性坐标系中,构建旋翼无人机的运动学方程;
[0014]
步骤三:在惯性坐标系中,设计虚拟点与无人机之间的编队误差。
[0015]
s3:旋翼无人机编队的避碰方法:
[0016]
步骤一:通过无向网络通信拓扑,使无人机之间相互通信,共享速度和位置等信息;
[0017]
步骤二:设置最短分离距离d
min,ij
,第i、j架旋翼无人机安全半径均为r,令已求得无人机路径同一时刻的离散点k的坐标分别为(x
i,k
,y
i,k
,z
i,k
)和(x
j,k
,y
j,k
,z
j,k
);
[0018]
步骤三:判断旋翼无人机之间是否会相互碰撞,即判断d
min
>2r是否成立;
[0019]
步骤四:若d
min
>2r成立则继续编队队形飞行,若不成立则进行避碰,旋翼无人机之间的距离小于分离距离时,无人机之间便会进行避碰;
[0020]
步骤五:取无人机编队中的两架旋翼无人机i、j对受力情况进行分析;
[0021]
步骤六:两架无人机的相对距离矢量为d
ij
=[x
i-xj,y
i-yj,z
i-zj],设置旋翼无人机的趋远力半径为r,平衡距离为2r以上;
[0022]
步骤七:由于正作用控制与反作用控制两者大小相同,方向相反,对其进行矢量化描述,以无人机i为受力对象进行分析;
[0023]
步骤八:根据步骤七可得,集群编队中的旋翼无人机i受到周围任意一架无人机j的趋远作用的姿态控制器为:
[0024][0025]
步骤九:对于集群中的m架无人机,每架无人机受到其余无人机的趋远作用,最终在其余所有无人机影响的作用下保持编队队形的同时进行避碰。
[0026]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法
的一种优选方案,其中:所述s2的步骤一中构建旋翼无人机一阶保持控制器模型的公式为
[0027]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s2的步骤二中旋翼无人机的运动学方程为:
[0028]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s2的步骤二中虚拟点和无人机的相对运动关系为:
[0029][0030][0031]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s2的步骤三中编队误差为:
[0032][0033]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s3的步骤二中避免碰撞的条件表示为:
[0034][0035]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s3的步骤五中两架无人机的状态分别为:
[0036][0037]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s3的步骤六中当两架无人机的相对距离在趋远力距离内时,两者之间的趋远姿态控制器为:
[0038][0038][0039]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s3的步骤七中受到无人机j的趋远作用的姿态控制器为:
[0040][0041]
作为本发明所述的一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法的一种优选方案,其中:所述s3的步骤八中当处于集群编队中时,无人机i所受其他旋翼无人机的影响的控制器为:
[0042][0043]
与现有技术相比:通过采用虚拟结构法对多架无人机构建一个虚拟刚体结构体,定义虚刚体的构型,在保持旋翼无人机编队稳定的情况下,使无人机的速度和位置保持相对一致,对无人机设置安全距离,使得旋翼无人机在保持队形的同时不会出现相互碰撞的情况,实现了更为精确的编队控制。
附图说明
[0044]
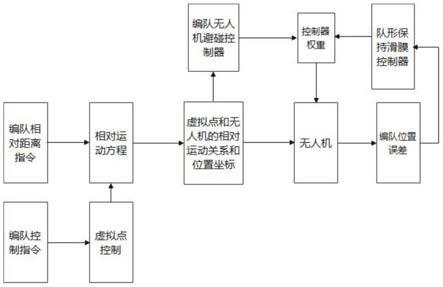
图1为本发明提供的编队保持和避碰控制系统结构图;
[0045]
图2为本发明提供的旋翼无人机编队保持控制器结构图;
[0046]
图3为本发明提供的旋翼无人机编队避碰控制器结构图;
[0047]
图4为本发明提供的旋翼无人机保持编队队形的飞行轨迹图。
具体实施方式
[0048]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
[0049]
本发明提供一种基于虚拟结构的多旋翼无人机编队保持与避碰控制方法,请参阅图1-4,包括以下操作步骤:
[0050]
s1:根据虚拟结构法拟定的坐标系设定集群中的m架无人机需要形成的编队构型为b
ω
=[(x'1,y'1,z'1)(x'2,y'2,z'2)...(x'm,y'm,z'm)],当前状态下的m架无人机为位置分布设为a
ω
=[(x1,y1,z1)(x2,y2,z2)...(xm,ym,zm)],初始状态下的虚拟几何构型中心为(x0,y0,z0)。
[0051]
s2:旋翼无人机编队保持方法:
[0052]
步骤1:构建旋翼无人机一阶保持控制器模型,具体公式为:
[0053][0054]
式中:τv为速度通道时间常数;τ
φ
为横滚角通道时间常数;τ
θ
为俯仰角通道时间常数;τ
ψ
为偏航角通道时间常数;v
ic
为速度指令;φ
ic
为横滚指令;θ
ic
为俯仰指令;ψ
ic
为偏航指令;i=0为虚拟点。
[0055]
步骤2:在惯性坐标系中,构建旋翼无人机的运动学方程为
[0056][0057]
虚拟点和无人机的相对运动关系为:
[0058][0059]
式中,t1(ψ0),t2(θ0),t3(φ0)均表示坐标变换矩阵,
[0060][0061]
旋翼无人机的运动学方程二阶导可得:
[0062][0063]
步骤3:在惯性坐标系中,设计虚拟点与无人机之间的编队误差为:
[0064]
令u=[v
upic ψ
upic θ
upic φ
upic
]
t
为控制量,则有:
[0065]
式中:
[0066][0067]
ξi=[ξ
xi ξ
yi ξ
zi
]
t
,i=1,2.....m为中出控制量外,在x,y,z方向上的分量。
[0068]
步骤4:根据连续滑模控制的数学模型,采用滑模相关渐近的方法可以设计滑模函数为:式中,c=[c
x c
y cz]为加权系数;
[0069]
采用幂次趋近率,有:k>0,1>α>0
[0070]
由此可得:
[0071]
则滑模控制器为:
[0072][0073]
通过将旋翼无人机编队系统的队形组成看作是刚性的虚拟结构,在旋翼无人机编队飞行运动期间,单个旋翼无人机个体可以看作是固定在虚拟结构上的固定位置上,首先
构建一阶保持控制器模型,其次构建无人机运动学方程,然后再设计虚拟点与无人机之间的编队误差,以此误差为基础设计滑模函数,并采用幂次趋近率得出滑模控制器。
[0074]
s3:旋翼无人机编队的避碰方法:
[0075]
步骤一:通过无向网络通信拓扑,使无人机之间相互通信,共享速度和位置等信息。
[0076]
步骤二:设置最短分离距离d
min,ij
,第i、j架旋翼无人机安全半径均为r。令已求得无人机路径同一时刻的离散点k的坐标分别为(x
i,k
,y
i,k
,z
i,k
)和(x
j,k
,y
j,k
,z
j,k
),避免碰撞的条件表示为:
[0077]dmin
>2r
[0078]dmin,ij
=min{d
ij
(k)|k=1,.....,m}
[0079][0080]
i≠j;i,j=1,....,m
[0081]
步骤三:判断旋翼无人机之间是否会相互碰撞,即判断d
min
>2r是否成立。
[0082]
步骤四:若d
min
>2r成立则继续编队队形飞行,若不成立则进行避碰,旋翼无人机之间的距离小于分离距离时,无人机之间便会进行避碰。
[0083]
步骤五:取无人机编队中的两架旋翼无人机i、j对受力情况进行分析,两架无人机的状态分别为:
[0084][0085]
步骤六:两架无人机的相对距离矢量为d
ij
=[x
i-xj,y
i-yj,z
i-zj],设置旋翼无人机的趋远力半径为r,平衡距离为2r以上;
[0086]
当两架无人机的相对距离在趋远力距离内时,两者之间的趋远姿态控制器为:
[0087][0088]
式中:μ为趋远系数;|d
ij
|为距离的绝对值;λ为趋远指数因子;
[0089]
步骤七:由于正作用控制与反作用控制两者大小相同,方向相反,对其进行矢量化描述,以无人机i为受力对象进行分析,其受到无人机j的趋远作用的姿态控制器为:
[0090][0091]
式中:下标i表示以i为研究对象,x表示在x轴上的趋远作用,上标1-j表示该无人机受到在趋远空间范围内无人机j的作用。
[0092]
步骤八:根据步骤七可得,集群编队中的旋翼无人机i受到周围任意一架无人机j的趋远作用的姿态控制器为:
[0093][0094]
当处于集群编队中时,无人机i所受其他旋翼无人机的影响的控制器为
[0095][0096]
式中:u
i-all
为以i为研究对象时无人机所受的全部影响;
[0097]
步骤九:对于集群中的m架无人机,每架无人机受到其余无人机的趋远作用,最终在其余所有无人机影响的作用下保持编队队形的同时进行避碰;
[0098]
无人机编队在滑模控制器和避碰控制器的共同作用下,达到了是无人机编队飞行过程中保持和避碰的作用;
[0099][0100]
式中:当d
ij
>2r时,δ=0;当r>d
ij
时,δ=1;
[0101]
通过通信拓扑,使编队无人机相互通信,设置最短的安全分离距离,判断无人机之间的距离是否小于安全距离,若大于则继续保持无人机编队飞行,若小于安全分离距离,所设计的趋远姿态控制器便会强制分离两架无人机,使距离大于最短安全分离距离。
[0102]
虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1