一种双控电磁阀的控制方法及控制系统与流程
1.本发明涉及数据控制技术技术领域,尤其涉及一种双控电磁阀的控制方法及控制系统。
背景技术:
2.现三菱编程软件对于io双控式的电磁阀控制,为一个输出点y对应一个电磁阀的线圈切换控制,而电磁阀的线圈又控制气缸的动作,简单点说就是一个输出点y控制一个气缸的一个动作,而一个气缸会有两个动作可执行,则一个气缸需要两个输出点y控制其动作的切换,即有多少个电磁阀或者气缸,则会有气缸或电磁阀数量的双倍输出点位需要在编程中一一写入才可进行对应的控制。
3.如例子:现要控制io双控气缸a及气缸b的伸缩动作,每个气缸都有一个伸出动作及缩回动作,ab两个气缸就会有2个伸出动作及2个缩回动作,因此对应三菱编程里就有4组输出点y来控制气缸ab。当需要控制气缸a的伸出动作,则需要写入代码y1的输出控制,需要缩回动作则需要写入代码y2的输出控制,当需要控制气缸b的伸出动作,则需要写入代码y3的输出控制,需要缩回动作则需要写入代码y4的输出控制。因此整个代码里,分别需要写入代码y1~y4的4条输出控制指令。依此类推,2个气缸需要写入4条输出控制指令代码,3个气缸需要写入6条输出控制指令代码
……
n个气缸需要写入n*2条输出控制指令代码。
4.但在实践中发现,依照现有的控制方式进行代码编写,当出现控制数量很多的时候,则就会出现的缺点:
5.1,代码量会增加,代码的复杂程度也会增加
6.2,复杂程度的加大,就会对于程序员后续维护的查阅增加难度
7.3,代码量的增大,也会造成plc(可编程逻辑控制器)控制的扫描周期变慢
8.4,代码量的增大,也意味着程序员在编程的过程中,工作量也增多。
技术实现要素:
9.本发明实施例公开一种双控电磁阀的控制方法及控制系统,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
10.本发明实施例第一方面公开一种双控电磁阀的控制方法,所述方法包括:
11.在获取到对于当前电磁阀组的变址地址时,将所述变址地址定义为第一数据寄存器地址;
12.在将所述第一数据寄存器地址除以指定数值之后,分别将所述第一数据寄存器地址除得的商定义为第二数据寄存器地址和将所述第一数据寄存器地址除得的余数定义为第三数据寄存器地址;
13.根据所述变址地址,转换出所述当前电磁阀所对应的触发变量和触发条件变量;
14.在触发变量和触发条件变量都达到要求的情况下,根据所述第三数据寄存器地址
的数值,判断出所述第一数据寄存器地址是否为偶数;
15.若是,计算出所述变址地址与控制地址初始值的总和,以作为控制所述当前电磁阀组执行第一个动作的第一输出控制变量;
16.对所述总和进行加一计算处理以得到作为控制所述当前电磁阀组执行第二个动作的第二输出控制变量;
17.置位所述第一输出控制变量并复位所述第二输出控制变量。
18.作为另一种可选的实施方式,在本发明实施例第一方面中,所述方法还包括:
19.若判断出所述第一寄存器地址不为偶数时,执行所述计算出所述变址地址与控制地址初始值的总和,以作为控制所述当前电磁阀组执行第一个动作的第一输出控制变量的操作;
20.对所述总和进行减一计算处理以得到作为控制所述当前电磁阀组执行所述第二个动作的所述第二输出控制变量。
21.作为另一种可选的实施方式,在本发明实施例第一方面中,所述置位所述第一输出控制变量并复位所述第二输出控制变量之后,所述方法还包括:
22.对所述触发变量进行复位处理。
23.作为另一种可选的实施方式,在本发明实施例第一方面中,所述对所述触发变量进行复位处理之后,所述方法还包括:
24.对所述变址地址进行加一计算处理,以获得下一变址地址;
25.检测所述下一变址地址的数值是否大于循环预设值;若否,将所述下一变址地址定义为所述第一数据寄存器地址;
26.重新执行在将所述第一数据寄存器地址除以指定数值之后,分别将所述第一数据寄存器地址除得的商定义为第二数据寄存器地址和将所述第一数据寄存器地址除得的余数定义为第三数据寄存器地址的操作。
27.作为另一种可选的实施方式,在本发明实施例第一方面中,所述方法还包括:
28.若所述触发变量和所述触发条件变量都达不到要求的情况下,执行所述对所述变址地址进行加一计算处理,以获得下一变址地址的操作。
29.本发明实施例第二方面公开一种控制系统,所述控制系统包括:
30.第一定义单元,用于在获取到对于当前电磁阀组的变址地址时,将所述变址地址定义为第一数据寄存器地址;
31.第二定义单元,用于在将所述第一数据寄存器地址除以指定数值之后,分别将所述第一数据寄存器地址除得的商定义为第二数据寄存器地址和将所述第一数据寄存器地址除得的余数定义为第三数据寄存器地址;
32.转换单元,用于根据所述变址地址,转换出所述当前电磁阀所对应的触发变量和触发条件变量;
33.判断单元,用于在触发变量和触发条件变量都达到要求的情况下,根据所述第三数据寄存器地址的数值,判断出所述第一数据寄存器地址是否为偶数;
34.第一计算单元,用于在所述判断单元判断出所述第一数据寄存器地址为偶数时,计算出所述变址地址与控制地址初始值的总和,以作为控制所述当前电磁阀组执行第一个动作的第一输出控制变量;
35.第二计算单元,用于对所述总和进行加一计算处理以得到作为控制所述当前电磁阀组执行第二个动作的第二输出控制变量;
36.置位与复位单元,用于置位所述第一输出控制变量并复位所述第二输出控制变量。
37.作为一种可选的实施方式,在本发明实施例第二方面中,所述控制系统还包括:
38.第一执行单元,用于在所述判断单元判断出所述第一数据寄存器地址不为偶数时,执行所述计算出所述变址地址与控制地址初始值的总和,以作为控制所述当前电磁阀组执行第一个动作的第一输出控制变量的操作;
39.第三计算单元,用于对所述总和进行减一计算处理以得到作为控制所述当前电磁阀组执行所述第二个动作的所述第二输出控制变量;
40.所述置位与复位单元,还用于置位所述第一输出控制变量并复位所述第二输出控制变量。
41.作为一种可选的实施方式,在本发明实施例第二方面中,所述控制系统还包括:
42.复位单元,用于在所述置位与复位单元置位所述第一输出控制变量并复位所述第二输出控制变量之后,对所述触发变量进行复位处理。
43.作为一种可选的实施方式,在本发明实施例第二方面中,所述控制系统还包括:
44.第四计算单元,用于在所述复位单元对所述触发变量进行复位处理之后,对所述变址地址进行加一计算处理,以获得下一变址地址;
45.检测单元,用于检测所述下一变址地址的数值是否大于循环预设值;
46.第三定义单元,用于在所述检测单元检测出所述下一变址地址的数值未大于循环预设值时,将所述下一变址地址定义为所述第一数据寄存器地址;
47.重新执行单元,用于重新执行在将所述第一数据寄存器地址除以指定数值之后,分别将所述第一数据寄存器地址除得的商定义为第二数据寄存器地址和将所述第一数据寄存器地址除得的余数定义为第三数据寄存器地址的操作。
48.作为一种可选的实施方式,在本发明实施例第二方面中,所述控制系统还包括:
49.第二执行单元,用于在若所述触发变量和所述触发条件变量都达不到要求的情况下,执行所述对所述变址地址进行加一计算处理,以获得下一变址地址的操作。
50.本发明实施例第三方面公开一种控制系统,所述控制系统包括:
51.存储有可执行程序代码的存储器;
52.与所述存储器耦合的处理器;
53.所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明实施例第一方面公开的一种双控电磁阀的控制方法。
54.本发明实施例第四方面公开一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序使得计算机执行本发明实施例第一方面公开的一种双控电磁阀的控制方法。
55.本发明实施例第五方面公开一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行第一方面的任意一种双控电磁阀的控制方法的部分或全部步骤。
56.本发明实施例第六方面公开一种应用发布平台,所述应用发布平台用于发布计算
机程序产品,其中,当所述计算机程序产品在计算机上运行时,使得所述计算机执行第一方面的任意一种双控电磁阀的控制方法的部分或全部步骤。
57.与现有技术相比,本发明实施例具有以下有益效果:
58.本发明实施例中,在获取到对于当前电磁阀组的变址地址时,将所述变址地址定义为第一数据寄存器地址;在将所述第一数据寄存器地址除以指定数值之后,分别将所述第一数据寄存器地址除得的商定义为第二数据寄存器地址和将所述第一数据寄存器地址除得的余数定义为第三数据寄存器地址;根据所述变址地址,转换出所述当前电磁阀所对应的触发变量和触发条件变量;在触发变量和触发条件变量都达到要求的情况下,根据所述第三数据寄存器地址的数值,判断出所述第一数据寄存器地址是否为偶数;若是,计算出所述变址地址与控制地址初始值的总和,以作为控制所述当前电磁阀组执行第一个动作的第一输出控制变量;对所述总和进行加一计算处理以得到作为控制所述当前电磁阀组执行第二个动作的第二输出控制变量;置位所述第一输出控制变量并复位所述第二输出控制变量。可见,本发明实施例,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
附图说明
59.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
60.图1是本发明实施例公开的一种双控电磁阀的控制方法的流程示意图;
61.图2是本发明实施例公开的另一种双控电磁阀的控制方法的流程示意图;
62.图3是本发明实施例公开的一种控制系统的结构示意图;
63.图4是本发明实施例公开的另一种控制系统的结构示意图;
64.图5是本发明实施例公开的另一种控制系统的结构示意图。
具体实施方式
65.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
66.需要说明的是,本发明的说明书和权利要求书中的术语“第一”、“第二”、“第三”“第四”等是用于区别不同的对象,而不是用于描述特定顺序。本发明实施例的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
67.本发明实施例公开了一种双控电磁阀的控制方法及控制系统,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制
每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
68.以下结合附图进行详细描述。
69.实施例一
70.请参阅图1,图1是本发明实施例公开的一种双控电磁阀的控制方法的流程示意图。如图1所示,该双控电磁阀的控制方法可以包括以下步骤。
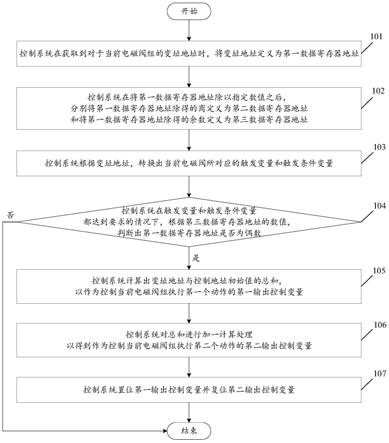
71.101、控制系统在获取到对于当前电磁阀组的变址地址时,将变址地址定义为第一数据寄存器地址。
72.作为一种可选的实施方式,在本发明实施例中,本技术中的第一数据寄存器地址可用于间接保存变址地址的数值变化。
73.102、控制系统在将第一数据寄存器地址除以指定数值之后,分别将第一数据寄存器地址除得的商定义为第二数据寄存器地址和将第一数据寄存器地址除得的余数定义为第三数据寄存器地址。
74.作为一种可选的实施方式,在本发明实施例中,控制系统可用除法计算第一数据寄存器地址,即可将第一数据寄存器地址除以2,得到计算结果的商保存在第二数据寄存器地址内,计算结果的余数保存在第三数据寄存器地址,这里的作用是根据第三数据寄存器地址来判断第一个寄存器地址的值是属于偶数还是奇数。
75.103、控制系统根据变址地址,转换出当前电磁阀所对应的触发变量和触发条件变量。
76.作为一种可选的实施方式,在本发明实施例中,本技术可预先定义模块外的触发变量以及触发条件变量,触发变量用于触发第一输出控制变量与第二输出控制变量的输出,触发条件变量用于判定触发变量是否能够触发,触发变量和触发条件变量的后缀可加上变址地址,以使其可根据变址地址的改变而发生改变。
77.作为一种可选的实施方式,在本发明实施例中,当触发变量和触发条件变量都达到要求的情况下,则可置位对应的第一输出控制变量与第二输出控制变量,置位了对应的第一输出控制变量与第二输出控制变量后,对应硬件上的电磁阀也会收到信号执行动作,从而控制了电磁阀的切换。
78.104、控制系统在触发变量和触发条件变量都达到要求的情况下,根据第三数据寄存器地址的数值,判断出第一数据寄存器地址是否为偶数;若是,执行步骤105~步骤107,若否,结束本次流程。
79.105、控制系统计算出变址地址与控制地址初始值的总和,以作为控制当前电磁阀组执行第一个动作的第一输出控制变量。
80.106、控制系统对总和进行加一计算处理以得到作为控制当前电磁阀组执行第二个动作的第二输出控制变量。
81.107、控制系统置位第一输出控制变量并复位第二输出控制变量。
82.作为一种可选的实施方式,在本发明实施例中,由于每个电磁阀会有两个动作,并且两个动作不能同时执行,所以当触发第一输出控制变量执行第一个动作时,第二输出控制变量的执行动作就要停止,比如需要气缸伸出的动作y100,那么气缸缩回的动作y101就需要停止,两个输出点y不能同时执行,因此在置位第一输出控制变量后,则需要复位第二输出控制变量。
83.作为一种可选的实施方式,在本发明实施例中,假设第一组电磁阀的两个输出点是第一输出控制变量y100和第二输出控制变量y101,那控制第一输出控制变量y100输出的时候,第二输出控制变量y101就要不能输出,那变址地址z=0的时候,就是控制的第一输出控制变量y100的输出,第二输出控制变量y101的不输出,而变址地址z=1的时候,控制的就反过来了,y100的不输出,y101的输出,第二组的电磁阀控制是y102和y103,那变址地址z=2的时候,就是控制的y102输出,y103不输出,变址地址z=3的时候,反过来控制y103的输出,y102的不输出,然后一直类推下去,达到每个输出y和对应的输出y+1,都能两两控制。
84.作为一种可选的实施方式,在本发明实施例中,本技术中的变址地址z用法,打个比方,y100z,可以看作是y(100+z),所以z=0,那就是y(100+0)=y100,z=1,就是y(100+1)=y101,本技术对yn值即指令地址码不做任何限定。
85.作为一种可选的实施方式,在本发明实施例中,当操作员需要控制y101要输出的时候,即可向系统输入变址地址z=1,则可根据y100=y(100+1)=y101,这个时候就能控制得到y101输出了,但y101=y(101+1)=y102,而y102是属于第二组的电磁阀,这明显不是控制的同一组了,而y0ff=y(0ff+1)=y100,y100才是第一组的电磁阀,所以就利用了的奇偶特性,来区分是控制y101的不输出,还是y0ff的不输出。
86.作为一种可选的实施方式,在本发明实施例中,就是第一输出控制变量y100和第二输出控制变量y101是属于同一个电磁阀控制的,而另一目标输出地址y102和y103属于另一个电磁阀控制的,根据变址地址变化的规则,当变址地址z=1的时候,那么y100 z=y101,y101 z=y102,而y102不属于同一个电磁阀的控制变量,这样的控制是不对应的,所以这个情况下就需要用到前面计算得到的第三数据寄存器地址余数,本技术可根据余数是0还是1来判断,当第三数据寄存器地址=0的时候,为偶数,此时y100z置位,控制的是电磁阀的第一个动作,y101z复位,控制的是电磁阀的第二个动作,当第三数据寄存器地址=1的时候,为奇数,此时y100 z置位,控制的是电磁阀的第二个动作,而y100 z的上一个变量为y0ff z,那么y0ff z复位,控制的是电磁阀的第一个动作,以此引用,当变址地址z=0的时候,y100控制电磁阀第一个动作的执行,y101则控制电磁阀第二个动作的停止,那么当变址地址z=1的时候,y101控制电磁阀第二个动作的执行,而y100z对应的上一个变址变量为y0ffz,所以此时复位y0ffz,那么就是控制电磁阀第一个动作的停止。
87.在图1所示的双控电磁阀的控制方法中,以控制系统作为执行主体为例进行描述。需要说明的是,图1所示的双控电磁阀的控制方法的执行主体还可以是与控制系统相关联的独立设备,本发明实施例不作限定。
88.可见,实施图1所描述的一种双控电磁阀的控制方法,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
89.此外,实施图1所描述的一种双控电磁阀的控制方法,能够将双控电磁阀的程序编程模块化,使得程序模块调用简单,不仅能减少程序员的工作量,其控制修改也更为方便。
90.实施例二
91.请参阅图2,图2是本发明实施例公开的另一种双控电磁阀的控制方法的流程示意图。如图2所示,该双控电磁阀的控制方法可以包括以下步骤:
92.201、控制系统在获取到对于当前电磁阀组的变址地址时,将变址地址定义为第一
数据寄存器地址。
93.202、控制系统在将第一数据寄存器地址除以指定数值之后,分别将第一数据寄存器地址除得的商定义为第二数据寄存器地址和将第一数据寄存器地址除得的余数定义为第三数据寄存器地址。
94.203、控制系统根据变址地址,转换出当前电磁阀所对应的触发变量和触发条件变量。
95.204、若触发变量和触发条件变量都达不到要求的情况下,控制系统执行对变址地址进行加一计算处理,以获得下一变址地址的操作,执行步骤213。
96.205、控制系统在触发变量和触发条件变量都达到要求的情况下,根据第三数据寄存器地址的数值,判断出第一数据寄存器地址是否为偶数;若是,执行步骤206~步骤207及步骤2010~步骤213,若否,执行步骤208~步骤213。
97.206、控制系统计算出变址地址与控制地址初始值的总和,以作为控制当前电磁阀组执行第一个动作的第一输出控制变量。
98.207、控制系统对总和进行加一计算处理以得到作为控制当前电磁阀组执行第二个动作的第二输出控制变量。
99.208、控制系统执行计算出变址地址与控制地址初始值的总和,以作为控制当前电磁阀组执行第一个动作的第一输出控制变量的操作。
100.209、控制系统对总和进行减一计算处理以得到作为控制当前电磁阀组执行第二个动作的第二输出控制变量。
101.210、控制系统置位第一输出控制变量并复位第二输出控制变量。
102.作为一种可选的实施方式,在本发明实施例中,就是第一输出控制变量y100和第二输出控制变量y101是属于同一个电磁阀控制的,而另一目标输出地址y102和y103属于另一个电磁阀控制的,根据变址地址变化的规则,当变址地址z=1的时候,那么y100 z=y101,y101 z=y102,而y102不属于同一个电磁阀的控制变量,这样的控制是不对应的,所以这个情况下就需要用到前面计算得到的第三数据寄存器地址余数,本技术可根据余数是0还是1来判断,当第三数据寄存器地址=0的时候,为偶数,此时y100z置位,控制的是电磁阀的第一个动作,y101z复位,控制的是电磁阀的第二个动作,当第三数据寄存器地址=1的时候,为奇数,此时y100 z置位,控制的是电磁阀的第二个动作,而y100 z的上一个变量为y0ff z,那么y0ff z复位,控制的是电磁阀的第一个动作,以此引用,当变址地址z=0的时候,y100控制电磁阀第一个动作的执行,y101则控制电磁阀第二个动作的停止,那么当变址地址z=1的时候,y101控制电磁阀第二个动作的执行,而y100z对应的上一个变址变量为y0ffz,所以此时复位y0ffz,那么就是控制电磁阀第一个动作的停止。
103.作为一种可选的实施方式,在本发明实施例中,当操作员需要控制y101要输出的时候,即可向系统输入变址地址z=1,则可根据y100=y(100+1)=y101,这个时候就能控制得到y101输出了,但y101=y(101+1)=y102,而y102是属于第二组的电磁阀,这明显不是控制的同一组了,而y0ff=y(0ff+1)=y100,y100才是第一组的电磁阀,所以就利用了的奇偶特性,来区分是控制y101的不输出,还是y0ff的不输出。
104.211、控制系统对触发变量进行复位处理。
105.作为一种可选的实施方式,在本发明实施例中,在触发变量触发第一输出控制变
量与第二输出控制变量输出之后,可将触发变量进行复位处理,以保证第一输出控制变量与第二输出控制变量不会一直被置位。
106.212、控制系统对变址地址进行加一计算处理,以获得下一变址地址。
107.213、控制系统检测下一变址地址的数值是否大于循环预设值;若否,执行步骤214,若是,结束本次流程。
108.214、控制系统将下一变址地址定义为第一数据寄存器地址,执行步骤202~步骤205。
109.作为一种可选的实施方式,在本发明实施例中,程序的执行过程主要分为3个步骤,输入检测、程序扫描、输出刷新,这是系统一个工作周期的工作顺序,在扫描的时候某些程序段需要执行多遍,这个时候可以使用for指令,让程序中的某一段反复执行多遍,然后再往下扫描。
110.作为一种可选的实施方式,在本发明实施例中,控制系统可在输出电磁阀的2个操作输出点之前,预先指定功能的循环次数,有多少组气缸动作需要控制,就需要循环多少次,如电磁阀中有32组的气缸动作,那么可循环指定功能进行32次。
111.作为一种可选的实施方式,在本发明实施例中,控制系统可预先指定一个变址地址,并将其初始值设定为0,以为后面第一输出控制变量和第二输出控制变量的变址提供一个初始的变量。
112.作为一种可选的实施方式,在本发明实施例中,在首次进入循环流程时,由于变址地址初始设定的数字为0,y100z这个地址可变为y100,然后通过加一指令,让变址地址z自加1,然后进入循环第二遍,以此类推,一直循环到系统所指定的循环次数为止,这样的话,就把本来很冗长的一大段简化成了一小段,节省程序步数的同时减少了编程的时间。
113.作为一种可选的实施方式,在本发明实施例中,循环扫描处理过程可以避免由于系统在执行程序的过程中进入死循环,或者由于系统执行非预定的程序造成系统故障,从而导致系统瘫痪,如果程序正常运行,则在每次扫描周期的内部处理阶段可对变址地址进行复位清零,如果程序运行失常进入死循环,变址地址得不到及时的复位清零,系统可即刻发出警报或停止工作,进而可有效的保证系统的逻辑顺利。
114.可见,实施图2所描述的另一种双控电磁阀的控制方法,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
115.此外,实施图2所描述的另一种双控电磁阀的控制方法,相比之前的编程方式,由繁化简,极大减少了代码编写的工作量。
116.此外,实施图2所描述的另一种双控电磁阀的控制方法,具有模块调用简单,复制黏贴就可使用等优势。
117.此外,实施图2所描述的另一种双控电磁阀的控制方法,其具有修改方便的优势,能够根据实际需要的控制数量,修改一个循环次数就能完成。
118.此外,实施图2所描述的另一种双控电磁阀的控制方法,能够应用灵活多组气缸的控制,只需要修改起始的变量即可。
119.此外,实施图2所描述的另一种双控电磁阀的控制方法,本技术中的触发变量和触发条件变量可调用到外部控制,应用方便。
120.实施例三
121.请参阅图3,图3是本发明实施例公开的一种控制系统的结构示意图。如图3所示,该控制系统300可以包括第一定义单元301、第二定义单元302、转换单元303、判断单元304、第一计算单元305、第二计算单元306与置位与复位单元307,其中:
122.第一定义单元301,用于在获取到对于当前电磁阀组的变址地址时,将变址地址定义为第一数据寄存器地址。
123.第二定义单元302,用于在将第一数据寄存器地址除以指定数值之后,分别将第一数据寄存器地址除得的商定义为第二数据寄存器地址和将第一数据寄存器地址除得的余数定义为第三数据寄存器地址。
124.转换单元303,用于根据变址地址,转换出当前电磁阀所对应的触发变量和触发条件变量。
125.判断单元304,用于在触发变量和触发条件变量都达到要求的情况下,根据第三数据寄存器地址的数值,判断出第一数据寄存器地址是否为偶数。
126.第一计算单元305,用于在判断单元304判断出第一数据寄存器地址为偶数时,计算出变址地址与控制地址初始值的总和,以作为控制当前电磁阀组执行第一个动作的第一输出控制变量。
127.第二计算单元306,用于对总和进行加一计算处理以得到作为控制当前电磁阀组执行第二个动作的第二输出控制变量。
128.置位与复位单元307,用于置位第一输出控制变量并复位第二输出控制变量。
129.作为一种可选的实施方式,在本发明实施例中,本技术中的第一数据寄存器地址可用于间接保存变址地址的数值变化。
130.作为一种可选的实施方式,在本发明实施例中,本技术可预先定义模块外的触发变量以及触发条件变量,触发变量用于触发第一输出控制变量与第二输出控制变量的输出,触发条件变量用于判定触发变量是否能够触发,触发变量和触发条件变量的后缀可加上变址地址,以使转换单元303可根据变址地址的改变而发生改变。
131.作为一种可选的实施方式,在本发明实施例中,当触发变量和触发条件变量都达到要求的情况下,则可置位对应的第一输出控制变量与第二输出控制变量,置位了对应的第一输出控制变量与第二输出控制变量后,对应硬件上的电磁阀也会收到信号执行动作,从而控制了电磁阀的切换。
132.作为一种可选的实施方式,在本发明实施例中,第二定义单元302可用除法计算第一数据寄存器地址,即可将第一数据寄存器地址除以2,得到计算结果的商保存在第二数据寄存器地址内,计算结果的余数保存在第三数据寄存器地址,这里的作用是使判断单元304根据第三数据寄存器地址来判断第一个寄存器地址的值是属于偶数还是奇数。
133.作为一种可选的实施方式,在本发明实施例中,由于每个电磁阀会有两个动作,并且两个动作不能同时执行,所以当触发第一输出控制变量执行第一个动作时,第二输出控制变量的执行动作就要停止,比如需要气缸伸出的动作y100,那么气缸缩回的动作y101就需要停止,两个输出点y不能同时执行,因此在置位第一输出控制变量后,则需要复位第二输出控制变量。
134.作为一种可选的实施方式,在本发明实施例中,假设第一组电磁阀的两个输出点
是第一输出控制变量y100和第二输出控制变量y101,那控制第一输出控制变量y100输出的时候,第二输出控制变量y101就要不能输出,那变址地址z=0的时候,就是控制的第一输出控制变量y100的输出,第二输出控制变量y101的不输出,而变址地址z=1的时候,控制的就反过来了,y100的不输出,y101的输出,第二组的电磁阀控制是y102和y103,那变址地址z=2的时候,就是控制的y102输出,y103不输出,变址地址z=3的时候,反过来控制y103的输出,y102的不输出,然后一直类推下去,达到每个输出y和对应的输出y+1,都能两两控制。
135.作为一种可选的实施方式,在本发明实施例中,本技术中的变址地址z用法,打个比方,y100z,可以看作是y(100+z),所以z=0,那就是y(100+0)=y100,z=1,就是y(100+1)=y101,本技术对yn值即指令地址码不做任何限定。
136.作为一种可选的实施方式,在本发明实施例中,当操作员需要控制y101要输出的时候,即可向系统输入变址地址z=1,则可根据y100=y(100+1)=y101,这个时候就能控制得到y101输出了,但y101=y(101+1)=y102,而y102是属于第二组的电磁阀,这明显不是控制的同一组了,而y0ff=y(0ff+1)=y100,y100才是第一组的电磁阀,所以就利用了的奇偶特性,来区分是控制y101的不输出,还是y0ff的不输出。
137.作为一种可选的实施方式,在本发明实施例中,就是第一输出控制变量y100和第二输出控制变量y101是属于同一个电磁阀控制的,而另一目标输出地址y102和y103属于另一个电磁阀控制的,根据变址地址变化的规则,当变址地址z=1的时候,那么y100 z=y101,y101 z=y102,而y102不属于同一个电磁阀的控制变量,这样的控制是不对应的,所以这个情况下就需要用到前面计算得到的第三数据寄存器地址余数,本技术可根据余数是0还是1来判断,当第三数据寄存器地址=0的时候,为偶数,此时y100z置位,控制的是电磁阀的第一个动作,y101z复位,控制的是电磁阀的第二个动作,当第三数据寄存器地址=1的时候,为奇数,此时y100 z置位,控制的是电磁阀的第二个动作,而y100 z的上一个变量为y0ff z,那么y0ff z复位,控制的是电磁阀的第一个动作,以此引用,当变址地址z=0的时候,y100控制电磁阀第一个动作的执行,y101则控制电磁阀第二个动作的停止,那么当变址地址z=1的时候,y101控制电磁阀第二个动作的执行,而y100z对应的上一个变址变量为y0ffz,所以此时复位y0ffz,那么就是控制电磁阀第一个动作的停止。
138.可见,实施图3所描述的控制系统,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
139.此外,实施图3所描述的控制系统,能够将双控电磁阀的程序编程模块化,使得程序模块调用简单,不仅能减少程序员的工作量,其控制修改也更为方便。
140.实施例四
141.请参阅图4,图4是本发明实施例公开的另一种控制系统的结构示意图。其中,图4所示的控制系统是由图3所示的控制系统进行优化得到的。与图3所示的控制系统相比较,图4所示的控制系统还可以包括:
142.第一执行单元308,用于在判断单元判断出第一数据寄存器地址不为偶数时,执行计算出变址地址与控制地址初始值的总和,以作为控制当前电磁阀组执行第一个动作的第一输出控制变量的操作。
143.第三计算单元309,用于对总和进行减一计算处理以得到作为控制当前电磁阀组
执行第二个动作的第二输出控制变量。
144.作为一种可选的实施方式,在本发明实施例中,就是第一输出控制变量y100和第二输出控制变量y101是属于同一个电磁阀控制的,而另一目标输出地址y102和y103属于另一个电磁阀控制的,根据变址地址变化的规则,当变址地址z=1的时候,那么y100 z=y101,y101 z=y102,而y102不属于同一个电磁阀的控制变量,这样的控制是不对应的,所以这个情况下就需要用到前面计算得到的第三数据寄存器地址余数,本技术可根据余数是0还是1来判断,当第三数据寄存器地址=0的时候,为偶数,此时y100z置位,控制的是电磁阀的第一个动作,y101z复位,控制的是电磁阀的第二个动作,当第三数据寄存器地址=1的时候,为奇数,此时y100 z置位,控制的是电磁阀的第二个动作,而y100 z的上一个变量为y0ff z,那么y0ff z复位,控制的是电磁阀的第一个动作,以此引用,当变址地址z=0的时候,y100控制电磁阀第一个动作的执行,y101则控制电磁阀第二个动作的停止,那么当变址地址z=1的时候,y101控制电磁阀第二个动作的执行,而y100z对应的上一个变址变量为y0ffz,所以此时复位y0ffz,那么就是控制电磁阀第一个动作的停止。
145.作为一种可选的实施方式,在本发明实施例中,当操作员需要控制y101要输出的时候,即可向系统输入变址地址z=1,则可根据y100=y(100+1)=y101,这个时候就能控制得到y101输出了,但y101=y(101+1)=y102,而y102是属于第二组的电磁阀,这明显不是控制的同一组了,而y0ff=y(0ff+1)=y100,y100才是第一组的电磁阀,所以就利用了的奇偶特性,来区分是控制y101的不输出,还是y0ff的不输出。
146.与图3所示的控制系统相比较,图4所示的控制系统还可以包括:
147.复位单元310,用于在置位与复位单元307置位第一输出控制变量并复位第二输出控制变量之后,对触发变量进行复位处理。
148.作为一种可选的实施方式,在本发明实施例中,在触发变量触发第一输出控制变量与第二输出控制变量输出之后,复位单元310可将触发变量进行复位处理,以保证第一输出控制变量与第二输出控制变量不会一直被置位。
149.与图3所示的控制系统相比较,图4所示的控制系统还可以包括:
150.第四计算单元311,用于在复位单元对触发变量进行复位处理之后,对变址地址进行加一计算处理,以获得下一变址地址。
151.检测单元312,用于检测下一变址地址的数值是否大于循环预设值。
152.第三定义单元313,用于在检测单元检测出下一变址地址的数值未大于循环预设值时,将下一变址地址定义为第一数据寄存器地址。
153.重新执行单元314,用于重新执行在将第一数据寄存器地址除以指定数值之后,分别将第一数据寄存器地址除得的商定义为第二数据寄存器地址和将第一数据寄存器地址除得的余数定义为第三数据寄存器地址的操作。
154.与图3所示的控制系统相比较,图4所示的控制系统还可以包括:
155.第二执行单元315,用于在若触发变量和触发条件变量都达不到要求的情况下,执行对变址地址进行加一计算处理,以获得下一变址地址的操作。
156.作为一种可选的实施方式,在本发明实施例中,系统的执行过程主要分为3个步骤,输入检测、程序扫描、输出刷新,这是系统一个工作周期的工作顺序,在扫描的时候某些程序段需要执行多遍,这个时候可以使用for指令,让程序中的某一段反复执行多遍,然后
再往下扫描。
157.作为一种可选的实施方式,在本发明实施例中,控制系统可在输出电磁阀的2个操作输出点之前,预先指定功能的循环次数,有多少组气缸动作需要控制,就需要循环多少次,如电磁阀中有32组的气缸动作,那么可循环指定功能进行32次。
158.作为一种可选的实施方式,在本发明实施例中,控制系统可预先指定一个变址地址,并将其初始值设定为0,以为后面第一输出控制变量和第二输出控制变量的变址提供一个初始的变量。
159.作为一种可选的实施方式,在本发明实施例中,在首次进入循环流程时,由于变址地址初始设定的数字为0,y100z这个地址可变为y100,然后通过加一指令,让变址地址z自加1,然后进入循环第二遍,以此类推,一直循环到系统所指定的循环次数为止,这样的话,就把本来很冗长的一大段简化成了一小段,节省程序步数的同时减少了编程的时间。
160.作为一种可选的实施方式,在本发明实施例中,循环扫描处理过程可以避免由于系统在执行程序的过程中进入死循环,或者由于系统执行非预定的程序造成系统故障,从而导致系统瘫痪,如果程序正常运行,则在每次扫描周期的内部处理阶段可对变址地址进行复位清零,如果程序运行失常进入死循环,变址地址得不到及时的复位清零,系统可即刻发出警报或停止工作,进而可有效的保证系统的逻辑顺利。
161.可见,实施图4所描述的另一种控制系统,能够将每一当前电磁阀组的目标输出地址融合于变址地址中,以保证程序模块调用简单的同时能够单独控制每一当前电磁阀组的目标输出地址,进而解决代码量大、复杂程度高、难以维护等问题。
162.此外,实施图4所描述的另一种控制系统,实施图2所描述的另一种双控电磁阀的控制方法,相比之前的编程方式,由繁化简,极大减少了代码编写的工作量。
163.此外,实施图4所描述的另一种控制系统,具有模块调用简单,复制黏贴就可使用等优势。
164.此外,实施图4所描述的另一种控制系统,其具有修改方便的优势,能够根据实际需要的控制数量,修改一个循环次数就能完成。
165.此外,实施图4所描述的另一种控制系统,能够应用灵活多组气缸的控制,只需要修改起始的变量即可。
166.此外,实施图4所描述的另一种控制系统,本技术中的触发变量和触发条件变量可调用到外部控制,应用方便。
167.实施例五
168.请参阅图5,图5是本发明实施例公开的另一种控制系统的结构示意图。
169.如图5所示,该控制系统可以包括:
170.存储有可执行程序代码的存储器501;
171.与存储器501耦合的处理器502;
172.其中,处理器502调用存储器501中存储的可执行程序代码,执行图1~图2任意一种双控电磁阀的控制方法。
173.本发明实施例公开一种计算机可读存储介质,其存储计算机程序,其中,该计算机程序使得计算机执行图1~图2任意一种双控电磁阀的控制方法。
174.本发明实施例还公开一种计算机程序产品,其中,当计算机程序产品在计算机上
运行时,使得计算机执行如以上各方法实施例中的方法的部分或全部步骤。
175.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一种计算机可读存储介质中,存储介质包括只读存储器(read-only memory,rom)、随机存储器(random access memory,ram)、可编程只读存储器(programmable read-only memory,prom)、可擦除可编程只读存储器(erasable programmable read only memory,eprom)、一次可编程只读存储器(one-time programmable read-only memory,otprom)、电子抹除式可复写只读存储器(electrically-erasable programmable read-only memory,eeprom)、只读光盘(compact disc read-only memory,cd-rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者能够用于携带或存储数据的计算机可读的任何其他介质。
176.以上对本发明实施例公开的一种双控电磁阀的控制方法及控制系统进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1