基于变论域模糊PID理论的拖拉机水田作业路径跟踪方法及系统
基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法及系统
技术领域
1.本发明属于农机智能控制技术领域,具体涉及一种基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法及系统。
背景技术:
2.近年来农业机械向着无人化、智能化方向发展,农业车辆的无人驾驶成为研究的重点。路径跟踪作为无人驾驶的核心技术,是研究的重中之重。拖拉机水田作业的路径跟踪不同于其他旱田或平地的路径跟踪,其地面高低起伏、湿滑泥泞,路面与轮胎之间的相互作用复杂多变,难以建立准确的数学模型,且车身在带机具作业时常发生侧滑和大幅倾斜,实际行驶的速度信息难以实时准确测量,因此使得以纯追踪算法为代表的一系列依赖于运动学或动力学模型、或要求行驶速度准确测量的路径跟踪算法在应用时受到很大限制。
技术实现要素:
3.针对现有技术中存在不足,本发明提供了一种基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法,保证拖拉机路径跟踪的精度和上线的平滑性。
4.本发明是通过以下技术手段实现上述技术目的的。
5.一种基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法,具体为:
6.变论域模糊pid控制器根据横向误差e和横向误差变化率ec,得到前轮目标转角δ1;
7.模糊控制器ⅲ根据横向误差e和航向误差得到前轮转角的补偿值δ2;
8.所述前轮目标转角δ1和前轮转角的补偿值δ2相加,得到前轮最终目标转角δ;
9.控制拖拉机前轮转动,使拖拉机前轮转角达到前轮最终目标转角δ,实现拖拉机的路径跟踪。
10.上述技术方案中,所述变论域模糊pid控制器包括模糊控制器i、模糊控制器ii和pid控制器;模糊控制器ⅰ输入横向误差e、横向误差变化率ec,得到论域伸缩因子α和比例因子β
x
,模糊控制器ⅱ根据横向误差e、横向误差变化率ec以及论域伸缩因子α和比例因子β
x
,得到误差δk
p
、δki、δkd,并发送给pid控制器;pid控制器计算出目标前轮转角δ1;其中x=p,i,d。
11.上述技术方案中,所述论域伸缩因子α和比例因子β
x
的模糊子集定义为{vs(特小)、s(小)、m(中)、b(大)、vb(特大)}。
12.上述技术方案中,利用论域伸缩因子α和比例因子β
x
对模糊控制器ⅱ输入输出模糊变量初始设置的论域进行调整,得到调整后的输入输出模糊变量的论域,具体为:
13.e∈[-α
×
e(0),α
×
e(0)]
[0014]
ec∈[-α
×
ec(0),α
×
ec(0)]
[0015]ep
∈[-β
p
×ep
(0),β
p
×ep
(0)]
[0016]ei
∈[-βi×ei
(0),βi×ei
(0)]
[0017]
ed∈[-βd×
ed(0),βd×
ed(0)]
[0018]
其中,e(0)为横向误差e模糊变量初始设置的论域,ec(0)为横向误差变化率ec模糊变量初始设置的论域,e
p
(0)为误差δk
p
模糊变量初始设置的论域,ei(0)为误差δki模糊变量初始设置的论域,ed(0)为误差δkd模糊变量初始设置的论域。
[0019]
上述技术方案中,所述横向误差e和航向误差是由导航定位模块实时获取的位置坐标和航向角分别与参考路径比较,不断计算更新得出的。
[0020]
一种基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法的控制系统,包括导航定位模块、变论域模糊pid控制器、模糊控制器iii和转向传动模块,导航定位模块将所述横向误差e和航向误差发送给模糊控制器iii、将所述横向误差e发送给变论域模糊pid控制器,变论域模糊pid控制器输出前轮目标转角δ1,模糊控制器iii输出前轮转角的补偿值δ2,前轮目标转角δ1和前轮转角的补偿值δ2相加后得到前轮最终目标转角δ并发送给转向传动模块。
[0021]
本发明的有益效果为:本发明变论域模糊pid控制器包括模糊控制器i、模糊控制器ii和pid控制器;模糊控制器i输入横向误差e、横向误差变化率ec,得到论域伸缩因子α和比例因子β
x
,模糊控制器ii根据横向误差e、横向误差变化率ec以及论域伸缩因子α和比例因子β
x
,得到误差δk
p
、δki、δkd,并发送给pid控制器;利用论域伸缩因子α和比例因子β
x
对模糊控制器ii输入输出模糊变量初始设置的论域进行调整,实现了模糊控制系统的自适应变化,使控制系统在整个控制过程中能充分利用模糊控制规则,提高了系统的控制精度和鲁棒性;本发明中模糊控制器iii利用拖拉机行驶过程中横向和航向的耦合关系,对变论域模糊pid控制器输出的前轮目标转角进行补偿,使拖拉机的路径跟踪上线过程更加平滑;经实验验证本发明能在拖拉机水田作业时保证路径跟踪的准确性和稳定性,满足无人驾驶要求。
附图说明
[0022]
图1为本发明总体控制系统框图;
[0023]
图2为本发明拖拉机路径跟踪时横向误差和航向误差示意图;
[0024]
图3为本发明变论域模糊pid控制器的系统框图;
[0025]
图4(a)为本发明中模糊控制器i和模糊控制器iii的输入量隶属度函数图;
[0026]
图4(b)为本发明中模糊控制器ⅰ的输出量隶属度函数图;
[0027]
图4(c)为本发明中模糊控制器ⅱ的输入量隶属度函数图;
[0028]
图5为本发明进行实地实验时拖拉机作业路径跟踪效果图。
具体实施方式
[0029]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0030]
本发明一种基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法基于图1所示的控制系统进行路径跟踪,所述控制系统包括导航定位模块、变论域模糊pid控制器、模糊控制器iii和转向传动模块,导航定位模块将更新的拖拉机当前路径与参考路径之间的横向误差和航向误差发送给模糊控制器iii、将更新的拖拉机当前路径与参考路径之间的
横向误差e发送给变论域模糊pid控制器,变论域模糊pid控制器输出前轮目标转角δ1,模糊控制器iii输出前轮转角的补偿值δ2,前轮目标转角δ1和前轮转角的补偿值δ2相加后得到前轮最终目标转角δ并发送给转向传动模块。
[0031]
一种基于变论域模糊pid理论的拖拉机水田作业路径跟踪方法,具体包括如下步骤:
[0032]
步骤(1),机手通过驾驶拖拉机或者遥控无人机等方式对待作业田块的三个顶点坐标进行采集,导航定位模块通过坐标数据确定田块边界,并根据人工设置的转弯半径、作业幅宽等规划出拖拉机作业的参考路径(zhang q,qiu h.a dynamic path search algorithm for tractor automatic navigation.transactions of the asabe,2004,47(2):639-646)。
[0033]
步骤(2),拖拉机进行路径跟踪作业时,导航定位模块实时获取拖拉机的位置坐标、航向角,并与参考路径比较,不断计算更新出拖拉机当前路径与参考路径之间的横向误差e和航向误差并将两项数据每0.1秒一次发送给下位机控制器。
[0034]
如图2所示,参考路径p和拖拉机位置均已知,横向误差e即为拖拉机后轮轴中心到参考路径的最短距离,以拖拉机行驶方向为参考,定义机体位置在参考路径右侧时横向误差e为正值,左侧时为负值;航向偏差为农机当前航向角与规划路径参考点航向角的差值。
[0035]
步骤(3),变论域模糊pid控制器根据横向误差e和横向误差变化率ec,输出前轮目标转角δ1;具体方法如下:
[0036]
图3为变论域模糊pid控制器内部系统结构图,包括模糊控制器i、模糊控制器ii和pid控制器;模糊控制器ⅰ输入横向误差e、横向误差变化率ec,得到论域伸缩因子α和比例因子β
x
(x=p,i,d),并发送给模糊控制器ⅱ;模糊控制器ⅱ根据横向误差e、横向误差的变化率ec以及论域伸缩因子α和比例因子β,得到误差δk
p
、δki、δkd,并发送给pid控制器;pid控制器计算出目标前轮转角δ1。
[0037]
横向偏差e是接收自导航定位模块的数据,频率为10hz,第k次接收到的横向偏差数据记为e(k);离散状态下横向偏差变化率ec定义为:
[0038]
ec(k)=ec(k)-ec(k-1)
[0039]
首先,模糊控制器i的输入量为横向误差e、横向误差变化率ec,将论域伸缩因子α和比例因子β
x
(x=p,i,d)输出给模糊控制器ii。其中输入量的实际论域根据拖拉机本身参数设置,将其进行模糊化后转化成模糊变量的模糊论域为e、fc,模糊集合定义为{pb(正大)、pm(正中)、ps(正小)、zo(零)、ns(负小)、nm(负中)、nb(负大)},隶属度函数图如图4
[0040]
(a)所示;根据实际调试经验将论域伸缩因子α和比例因子β
x
(x=p,i,d)的模糊论域设为[0,1],模糊子集定义为{vs(特小)、s(小)、m(中)、b(大)、vb(特大)},隶属函数图如图4
[0041]
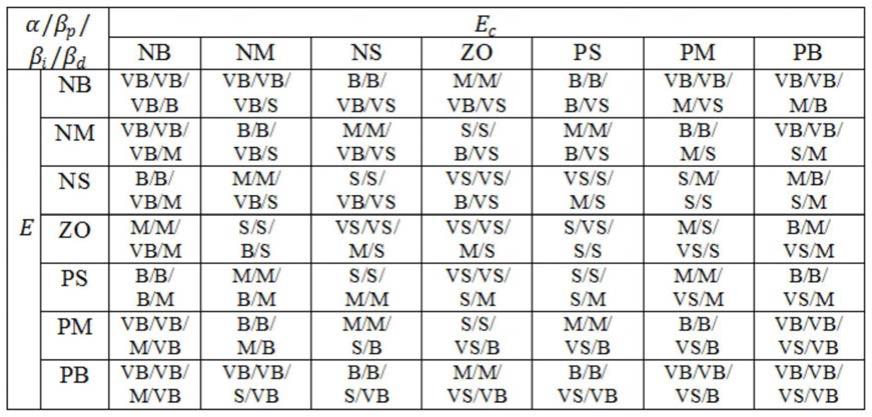
(b)所示。根据实时误差反馈与模糊变量之间的相互关系,建立模糊控制规则表,如表1所示;随后采用mamdani推理法对变量进行模糊推理,确定变量最终的隶属度后使用重心法进行去模糊化,最终得到在此时输入下的α、β
x
(x=p,i,d)的准确数值。
[0042]
表1
[0043][0044]
随后,模糊控制器ii根据横向误差e、横向误差的变化率ec以及论域伸缩因子α和比例因子β
x
,通过模糊控制算法计算出pid控制参数的误差δk
p
、δki、δkd(计算的过程为现有技术),并输出给pid控制器。其中两个输入量的实际论域根据拖拉机本身参数设置,两者的模糊变量初始设置的论域为e(0)、ec(0),三个输出控制量的模糊变量初始设置的论域为e
p
(0)、ei(0)、ed(0);结合步骤(3)中模糊控制器i输出的伸缩因子α和比例因子β
x
(x=p,i,d)对初始设置的论域进行调整,得到调整后的输入输出模糊变量的论域,如下式:
[0045]
e∈[-α
×
e(0),α
×
e(0)]
[0046]
ec∈[-α
×
ec(0),α
×
ec(0)]
[0047]ep
∈[-β
p
×ep
(0),β
p
×ep
(0)]
[0048]ei
∈[-βi×ei
(0),βi×ei
(0)]
[0049]
ed∈[-βd×
ed(0),βd×
ed(0)]
[0050]
输入输出变量的模糊子集均为{pb(正大)、pm(正中)、ps(正小)、zo(零)、ns(负小)、nm(负中)、nb(负大)},隶属函数图如图4(c)所示,根据现场调试经验和pid控制器的参数特征,制定模糊控制规则表如表2所示;采用mamdani推理法对变量进行模糊推理,确定变量最终的隶属度后使用重心法进行去模糊化,最终得到在此时输入下的δk
p
、δki、δkd的准确数值。
[0051]
表2
[0052][0053]
最后,随后pid控制器采用离散的位置式pid算法计算出目标前轮转角δ1:
[0054][0055]
t为采样周期0.1s,控制参数k
p
、ki、kd每次计算时根据模糊控制器ii输出的控制参数误差δk
p
、δki、δkd进行如下更新:
[0056][0057]
在普通的模糊pid算法中,输入输出的模糊变量论域是固定的,论域范围的选择对系统的效果影响很大。当论域选择的范围较大时,会造成模糊控制规则的被稀释,系统控制的精度降低;当论域选择的范围较小时,则会造成系统的控制量输出波动较大。所以在本发明中,通过被控对象输出误差以及误差变化率为反馈,实现模糊控制器的实时自适应调整,降低了对初始规则准确性的要求,提高了系统的控制精度。
[0058]
步骤(4),模糊控制器ⅲ根据横向误差e和航向误差通过模糊控制算法得到前轮转角的补偿值δ2,与模糊pid控制器输出的前轮目标转角δ1相加后得到前轮最终目标转角δ,具体方法如下:
[0059]
模糊控制器ⅲ的输入量为横向误差e和航向误差输出控制量为前轮目标转角的补偿值δ2;输入输出量的实际论域根据拖拉机自身参数设置,将输入输出量进行模糊化后转化为模糊量,模糊子集均为{pb(正大)、pm(正中)、ps(正小)、zo(零)、ns(负小)、nm(负中)、nb(负大)},隶属函数图如图4(a)所示,根据车辆行驶过程中横向和航向的耦合关系,结合专家经验和现场调试数据,制定模糊规则控制表如表3所示。
[0060]
表3
[0061][0062]
前轮最终目标转角δ=δ1+δ2。
[0063]
步骤(5),转向传动模块根据前轮最终目标转角δ,通过电动方向盘控制拖拉机前轮转动,并以前轮转角传感器采集的前轮转角为反馈,使拖拉机前轮转角达到预定的目标转角,实现拖拉机的路径跟踪。
[0064]
以加装了导航定位模块、控制器、电动方向盘等部件的乐星1004拖拉机为实验对象,在刚刚收割并进行犁耕之后的水稻田中进行拖拉机无人旋耕作业路径跟踪,田块地面含水量较高,犁耕后堆积的土壤高低起伏约为20~30cm。航向误差的实际论域设置为[-30
°
,30
°
],横向误差e的实际论域设置为[-3m,3m],误差变化率ec的实际论域为[-1,1],前轮目标转角δ1的模糊论域为[-45
°
,45
°
],前轮转角补偿值δ2的模糊论域为[-5
°
,5
°
]。图5为路径跟踪的效果图,直线段稳定行驶时的横向跟踪误差不超过5cm,结果表明本发明的路径跟踪方法在水田无人作业时有较好的效果。
[0065]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1