一种基于PLC的修井铁钻工远程操作装置
一种基于plc的修井铁钻工远程操作装置
技术领域
1.本实用新型涉及石油修井辅助设备领域,更具体地,涉及一种基于plc的修井铁钻工远程操作装置。
背景技术:
2.目前国内陆地修井机中的自动化系统装备方面,类型比较单一,可靠性和稳定性不高,在自动化方面只是强调单个设备的自动化程度。如公开号为 cn205225116u提出的一种全自动铁钻工,能实现钻具连接和拆卸的自动化操作,但该方案为全自动化设备,无法结合铁钻工作业实际情况对装置执行远程控制操作。
技术实现要素:
3.本实用新型为克服上述现有技术所述的无法结合作业实际情况对装置执行远程控制操作的缺陷,提供一种基于plc的修井铁钻工远程操作装置。
4.为解决上述技术问题,本实用新型的技术方案如下:
5.一种基于plc的修井铁钻工远程操作装置,包括操作开关模块、plc控制器、电源模块,其中,plc控制器包括cpu模块、数字信号模块、模拟信号模块,cpu模块内设置有以太网接口;操作开关模块的输出端分别与cpu模块、数字信号模块、模拟信号模块的输入端连接;数字信号模块、模拟信号模块分别与cpu模块通过总线连接;plc控制器经以太网接口通过以太网与铁钻工控制系统实时通讯;电源模块的输出端分别与操作开关模块、plc控制器的供电端连接。
6.本技术方案中,作业人员通过调控操作开关模块输入操作指令,plc控制器中的模拟信号模块对输入的模拟信号进行采集后送入cpu模块中进行分析处理;plc控制器通过以太网与铁钻工控制系统实时通讯,将操作指令发送至铁钻工控制系统中执行,实现修井铁钻工远程操作。装置还可以经以太网接口与外部设备电控系统实现钻机现场设备的互联互通。
7.作为优选方案,所述操作开关模块包括急停开关、操作模式开关、控制切换开关、管柱扣型开关、旋扣钳动作开关、冲扣钳动作开关、自动模式开关、工位转换开关、钳体伸缩开关、钳体升降开关、旋扣器升降开关、工位标定开关、主钳中位标定开关、卸扣时间开关、电源开关。其中,所述急停开关、操作模式开关、控制切换开关、管柱扣型开关、旋扣钳动作开关、冲扣钳动作开关的输出端分别与所述cpu模块的输入端连接,所述自动模式开关、工位转换开关、钳体伸缩开关、钳体升降开关、旋扣器升降开关、工位标定开关、主钳中位标定开关的输出端分别与所述数字信号模块的输入端连接,所述卸扣时间开关的输出端与所述模拟信号模块的输入端连接。
8.作为优选方案,所述装置还包括指示灯模块,所述指示灯模块的输入端与所述cpu模块的输出端电性连接;所述电源模块的输出端与所述指示灯模块的供电端电性连接。
9.作为优选方案,所述指示灯模块包括预紧状态指示灯、紧扣状态指示灯、报警状态
指示灯。
10.作为优选方案,所述装置还包括电控接口,所述电控接口与所述以太网接口通过以太网连接,装置通过电控接口与外部设备连接。
11.作为优选方案,所述装置还包括交换机,所述铁钻工控制系统通过所述交换机与所述以太网接口连接。
12.作为优选方案,所述装置还包括显示模块,所述显示模块通过所述交换机与所述以太网接口连接。
13.作为优选方案,所述显示模块包括触摸显示屏。
14.作为优选方案,所述显示模块采用simatic hmi精智面板tp700。
15.作为优选方案,所述cpu模块采用cpu 1214c dc/dc/dc型号cpu,所述模拟型号模块采用sm 1231型号扩展模块,所述数字信号模块采用sm 1221型号扩展模块。
16.与现有技术相比,本实用新型技术方案的有益效果是:本实用新型采用操作开关模块供作业人员选择调控修井铁钻工的操作指令,并通过plc控制器对操作指令进行分析处理以及远程传输至铁钻工控制系统,实现修井铁钻工远程操作功能;可根据用户需求灵活组合,与铁钻工控制系统实时通讯,实现铁钻机作业现场设备互联互通,具有可扩展性、灵活性等特点,性能稳定。
附图说明
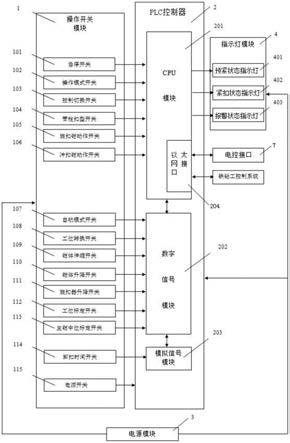
17.图1为实施例1的基于plc的修井铁钻工远程操作装置的电气结构示意图。
18.图2为实施例1的基于plc的修井铁钻工远程操作装置的操作面板示意图。
19.图3为实施例2的基于plc的修井铁钻工远程操作装置的电气结构示意图。
20.图4为实施例2的基于plc的修井铁钻工远程操作装置的操作面板示意图。
21.其中,1-操作开关模块,101-急停开关,102-操作模式开关,103-控制切换开关, 104-管柱扣型开关,105-旋扣钳动作开关,106-冲扣钳动作开关,107-自动模式开关,108-工位转换开关,109-钳体伸缩开关,110-钳体升降开关,111-旋扣器升降开关,112-工位标定开关,113-主钳中位标定开关,114-卸扣时间开关,115
‑ꢀ
电源开关,2-plc控制器,201-cpu模块,202-数字信号模块,203-模拟信号模块,204-以太网接口,3-电源模块,4-指示灯模块,401-预紧状态指示灯,402
‑ꢀ
紧扣状态指示灯,403-报警状态指示灯,5-显示模块,6-交换机,7-电控接口。
具体实施方式
22.附图仅用于示例性说明,不能理解为对本专利的限制;
23.为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
24.对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
25.下面结合附图和实施例对本实用新型的技术方案做进一步的说明。
26.实施例1
27.本实施例提出一种基于plc的修井铁钻工远程操作装置,如图1~2所示,为本实施
例的基于plc的修井铁钻工远程操作装置的结构示意图。
28.本实施例提出的基于plc的修井铁钻工远程操作装置中,包括操作开关模块1、plc控制器2、电源模块3,其中,plc控制器2包括cpu模块201、数字信号模块202、模拟信号模块203,cpu模块201内设置有以太网接口204;操作开关模块1的输出端分别与cpu模块201、数字信号模块202、模拟信号模块203的输入端连接;数字信号模块202、模拟信号模块203分别与cpu模块 201通过总线连接;plc控制器2通过以太网与铁钻工控制系统实时通讯;电源模块3的输出端分别与操作开关模块1、plc控制器2的供电端连接。
29.进一步的,本实施例中的操作开关模块1包括急停开关101、操作模式开关 102、控制切换开关103、管柱扣型开关104、旋扣钳动作开关105、冲扣钳动作开关106、自动模式开关107、工位转换开关108、钳体伸缩开关109、钳体升降开关110、旋扣器升降开关111、工位标定开关112、主钳中位标定开关113、卸扣时间开关114、电源开关115。其中,急停开关101、操作模式开关102、控制切换开关103、管柱扣型开关104、旋扣钳动作开关105、冲扣钳动作开关106 的输出端分别与cpu模块201的输入端连接,自动模式开关107、工位转换开关108、钳体伸缩开关109、钳体升降开关110、旋扣器升降开关111、工位标定开关112、主钳中位标定开关113的输出端分别与数字信号模块202的输入端连接,卸扣时间开关114的输出端与模拟信号模块203的输入端连接。
30.其中,紧急情况下快速按下急停开关101来达到紧急停车保护;选择操作模式开关102实现手动/自动上卸扣操作;控制切换开关103用于切换当前装置为本地操作模式、触控操作模式、遥控操作模式;选择管柱扣型开关104根据管柱的扣型实现正扣/反扣操作;选择旋扣钳动作开关105实现上扣/停止/卸扣操作;选择冲扣钳动作开关106实现紧扣/停止/松扣操作;选择自动模式开关107实现管柱自动紧扣/停止/松扣操作;选择工位转换开关108实现铁钻工自动定位井口/ 鼠洞/待机位置操作;选择钳体伸缩开关109实现钳体伸出/缩回操作;选择钳体升降开关110实现钳体上升/下降操作;选择旋扣器升降开关111实现微调旋扣器上升/下降操作;选择工位标定开关112和工位转换开关108配合实现铁钻工不同工位的标定;选择主钳中位标定开关113实现铁钻工主钳中位的标定;选择卸扣时间开关114通过旋转旋钮,旋钮式变阻器和串联的精密电阻组成的分压电路电压改变,由模拟信号模块203采集模拟量电压变化经相关数据处理后实现卸扣时间的设置。
31.进一步的,本实施例中的装置还包括指示灯模块4,指示灯模块4的输入端与cpu模块201的输出端电性连接;电源模块3的输出端与指示灯模块4的供电端电性连接。其中,指示灯模块4包括预紧状态指示灯401、紧扣状态指示灯 402、报警状态指示灯403。plc控制器2通过以太网通信接收铁钻工控制系统返回的状态信息并进行分析,然后向指示灯模块4发送工作信号,控制相应的指示灯工作,显示当前修井铁钻工的预紧状态、紧扣状态、报警状态。
32.本实施例中,cpu模块201采用cpu 1214c dc/dc/dc型号cpu,模拟信号模块203采用sm 1231型号扩展模块,数字信号模块202采用sm 1221型号扩展模块。
33.在具体实施过程中,作业人员通过调控操作开关模块1输入操作指令,plc 控制器2中的模拟信号模块203对输入的模拟量进行采集后送入cpu模块201 中进行分析处理,plc控制器2通过以太网与铁钻工控制系统实时通讯,将操作指令发送至铁钻工控制系统中执行,实现修井铁钻工远程操作。
34.本实施例提出的基于plc的修井铁钻工远程操作装置可以根据作业人员的需求灵活组合,便于与钻机现场设备的无缝对接,便于升级改造的铁钻工远程操作装置,解决传统的铁钻工远程操作装置模块化、可扩展性及灵活性不足的问题。
35.实施例2
36.本实施例在实施例1提出的基于plc的修井铁钻工远程操作装置的基础上作出改进。如图3~4所示,为本实施例的基于plc的修井铁钻工远程操作装置的结构示意图。
37.本实施例提出的基于plc的修井铁钻工远程操作装置中,还包括显示模块 5、交换机6、电控接口7,其中,铁钻工控制系统、显示模块5、电控接口7分别通过交换机6与以太网接口204连接。
38.本实施例中,显示模块5为触摸显示屏,采用simatic hmi精智面板 tp700。
39.在具体实施过程中,作业人员根据实际操作情况旋动控制切换开关103,选择当前装置为本地模式、触控模式或遥控模式:
40.当选择为本地模式时,作业人员进一步调控操作开关模块1输入操作指令, plc控制器2中的cpu模块201、数字信号模块202、模拟信号模块203分别对经调控操作开关模块1输入的操作指令进行采集及数据分析,plc控制器2通过以太网与铁钻工控制系统实时通讯,将操作指令发送至铁钻工控制系统中执行,实现修井铁钻工远程操作;
41.当选择为触控模式时,作业人员通过显示模块5输入操作指令,显示模块5 将触摸产生的电信号进行处理后发送至plc控制器2中进一步分析处理,plc 控制器2通过以太网与铁钻工控制系统实时通讯,将操作指令发送至铁钻工控制系统中执行,实现修井铁钻工远程操作;
42.当选择为遥控模式时,作业人员配合外部遥控设备实现修井铁钻工远程操作。
43.此外,作业人员还可以通过外部设备进行操作指令通信传输,如电控系统,将电控系统的输出端与电控接口7连接,电控系统将操作指令经电控接口7、交换机6通过以太网发送至plc控制器2中进一步分析处理,plc控制器2通过以太网与铁钻工控制系统实时通讯,将操作指令发送至铁钻工控制系统中执行,实现修井铁钻工远程操作。
44.本实施例采用显示模块5、遥控设备、电控接口7和操作开关模块1配合使用或独立使用完成各种远程操控的功能,提高了装置在各种复杂使用环境下的可靠性,简洁性,操作方便。
45.相同或相似的标号对应相同或相似的部件;
46.附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制;
47.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1