基于优化烟花算法的多智能体路径规划方法及装置与流程
本申请涉及人工智能,特别涉及一种基于优化烟花算法的多智能体路径规划方法及装置。
背景技术:
1、无人机、无人艇和水下uuv等多智能体无人平台通过协同方式完成既定任务是未来智能化作战的主要作战样式,可有效弥补单个智能体无法独立完成复杂任务的缺陷,同时缩短执行任务的时间,提高解决方案的有效性与鲁棒性。多智能体路径规划(multi-agent path finding,mapf)则是多智能体协同技术的一个主要研究方向,旨在为每个智能体规划出一条满足目标要求的有效路径。mapf要求工作环境中的信息全部已知,而且在智能体移动的过程中环境信息保持不变,它是单智能体路径规划的发展与衍生,可定义为寻找多个智能体从起始点到目标点且无冲突的最优路径集合的问题。与单智能体全局路径规划不同的是,多智能体系统中的智能体间涉及到“协调”与“合作”,所以进行多智能体规划路径时,不仅要考虑路径平滑程度、智能体与障碍间的距离,还应该考虑智能体自身之间的碰撞问题。因此,对于mapf任务而言,其中为每个智能体规划的路径未必是最优的,但是对于整个mapf系统而言是较优的。
2、群智能优化算法通过模拟自然界中生物种群的生理机制,捕捉群体所呈现的智能涌现行为而获得强大的搜索能力,因此群智能优化算法在实现多智能体路径规划方面具有很强的适应性。
技术实现思路
1、本申请提供了一种基于优化烟花算法的多智能体路径规划方法及装置,以采用一种改进的烟花算法实现多智能体全局路径规划。
2、本申请的技术方案如下:
3、一方面,提供了一种基于优化烟花算法的多智能体路径规划方法,该方法包括:
4、步骤1:初始化迭代次数t=1,针对每一个智能体初始化n个烟花,一个烟花为一条路径;计算n个烟花中每一个烟花的适应度;其中,适应度与路径长度、路径碰撞风险度、智能体间碰撞风险度、以及路径平滑度相关;
5、步骤2:保存n个烟花中适应度最小的一个烟花作为最优烟花;
6、步骤3:计算n个烟花中每一个烟花的路径碰撞程度,选择路径碰撞程度为0且适应度最小的na个烟花,其中na<n,路径碰撞程度为0表示路径与所有障碍物均不存在碰撞情况;
7、步骤4:对na个烟花进行爆炸生成爆炸火花,计算每个爆炸火花的适应度;对na个烟花进行高斯变异生成高斯变异火花,计算每个高斯变异火花的适应度;
8、步骤5:生成随机数ξ,若ξ大于预设阈值,则从na个烟花中任意选择两个烟花,若ξ不大于预设阈值,则从n个烟花中任意选择两个烟花,对选中的两个烟花进行差分进化运算生成差分进化火花,计算差分进化火花的适应度,其中,ξ∈[0,1],预设阈值属于(0,1);
9、步骤6:从由na个烟花、爆炸火花、高斯变异火花、以及差分进化火花组成的候选集合中选择n-1个个体,将选中的n-1个个体和保存的最优烟花作为下一次迭代的烟花;
10、步骤7:令t=t+1,判断t是否大于最大迭代次数,若不大于,则返回步骤2执行下一次的迭代操作,若大于,则将最终的最优烟花作为对应智能体的全局最优路径。
11、另一方面,还提供了一种基于优化烟花算法的多智能体路径规划装置,该装置包括:
12、初始化模块,用于初始化迭代次数t=1,针对每一个智能体初始化n个烟花,一个烟花为一条路径;
13、计算模块,用于计算n个烟花中每一个烟花的适应度;其中,适应度与路径长度、路径碰撞风险度、智能体间碰撞风险度、以及路径平滑度相关;还用于计算n个烟花中每一个烟花的路径碰撞程度,选择路径碰撞程度为0且适应度最小的na个烟花,其中na<n,路径碰撞程度为0表示路径与所有障碍物均不存在碰撞情况;还用于计算每个爆炸火花的适应度,计算每个高斯变异火花的适应度,计算差分进化火花的适应度;
14、保存模块,用于保存n个烟花中适应度最小的一个烟花作为最优烟花;
15、生成模块,用于对na个烟花进行爆炸生成爆炸火花,对na个烟花进行高斯变异生成高斯变异火花;还用于生成随机数ξ,若ξ大于预设阈值,则从na个烟花中任意选择两个烟花,若ξ不大于预设阈值,则从n个烟花中任意选择两个烟花,对选中的两个烟花进行差分进化运算生成差分进化火花,其中,ξ∈[0,1],预设阈值属于(0,1);
16、选择模块,用于从由na个烟花、爆炸火花、高斯变异火花、以及差分进化火花组成的候选集合中选择n-1个个体,将选中的n-1个个体和保存的最优烟花作为下一次迭代的烟花;
17、判断模块,用于令t=t+1,判断t是否大于最大迭代次数,若不大于,则指令计算模块、保存模块、生成模块、选择模块执行下一次的迭代操作,若大于,则将最终的最优烟花作为对应智能体的全局最优路径。
18、在本申请的技术方案中,对多智能体协同路径规划问题进行了深入分析,采用烟花算法对多智能体进行全局路径规划,并且对传统烟花算法进行了优化改进,建立了多智能体协同路径规划性能指标,在传统烟花算法的基础上增加了差分进化火花,对多智能体协同路径进行最优化求解,以解决基于演化算法的多智能体协同路径规划问题求解。该方法有效提高了多智能体路径规划的全局收敛鲁棒性和路径搜索能力,并且提高了每次迭代的种群多样性和算法多样性,防止算法陷入局部最优解,提高了多智能体路径规划的性能。
技术特征:
1.一种基于优化烟花算法的多智能体路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,路径p={ps,p1,p2,...,pi,...,pd,pt},ps和pt分别表示路径p的起始点和目标点的坐标,pi表示路径p在维度i上的点坐标,i=1,2,...,d,路径中相邻两个点组成一个路径段,路径p上包含d+1个路径段,则路径碰撞程度cv的计算公式如下:
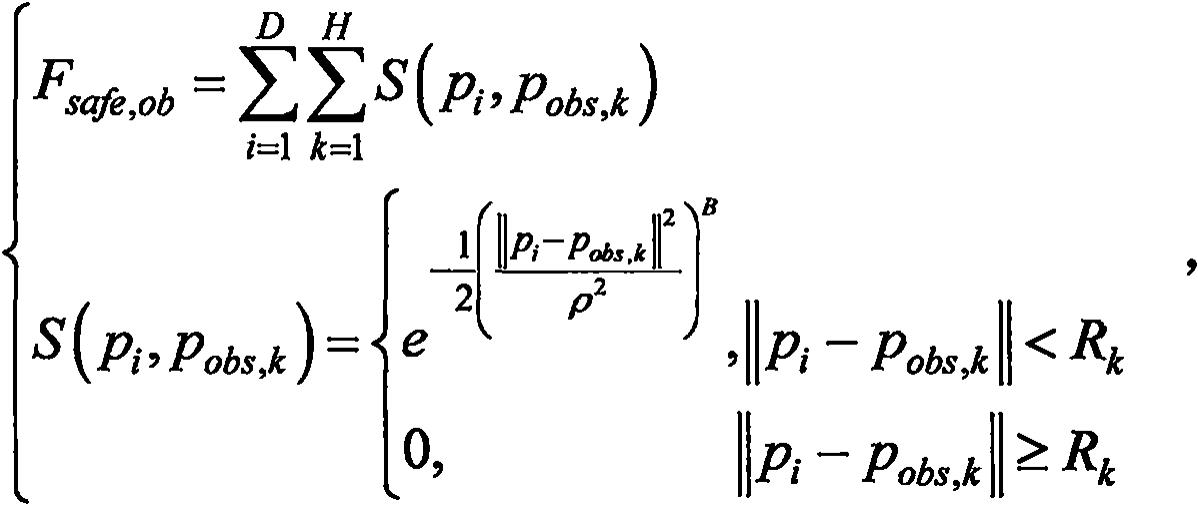
3.根据权利要求2所述的方法,其特征在于,按照以下公式计算适应度f:
4.根据权利要求1所述的方法,其特征在于,
5.根据权利要求1至4中任一项所述的方法,其特征在于,对na个烟花进行爆炸生成爆炸火花,具体包括:
6.根据权利要求1至4中任一项所述的方法,其特征在于,对所述na个烟花进行高斯变异生成高斯变异火花,具体包括:
7.根据权利要求1所述的方法,其特征在于,按照以下公式对选中的两个烟花进行差分进化运算生成差分进化火花:
8.一种基于优化烟花算法的多智能体路径规划装置,其特征在于,所述装置包括:
9.根据权利要求8所述的装置,其特征在于,路径p={ps,p1,p2,...,pi,...,pd,pt},ps和pt分别表示路径p的起始点和目标点的坐标,pi表示路径p在维度i上的点坐标,i=1,2,...,d,路径中相邻两个点组成一个路径段,路径p上包含d+1个路径段,则路径碰撞程度cv的计算公式如下:
10.根据权利要求9所述的装置,其特征在于,按照以下公式计算适应度f:
技术总结
本申请公开了一种基于优化烟花算法的多智能体路径规划方法及装置。该方法包括:针对每一个智能体初始化N个烟花,计算每一个烟花的适应度,适应度与路径长度、路径碰撞风险度、智能体间碰撞风险度、路径平滑度相关;保存N个烟花中适应度最小的一个烟花作为最优烟花;计算每一个烟花的路径碰撞程度,选择路径碰撞程度为0且适应度最小的Na个烟花;生成爆炸火花、高斯变异火花以及差分进化火花,计算每个火花的适应度;从Na个烟花、爆炸火花、高斯变异火花、以及差分进化火花中选择N‑1个个体,将这N‑1个个体和最优烟花作为下一次迭代的烟花;不断执行上述迭代操作直至达到最大迭代次数,将最终的最优烟花作为对应智能体的全局最优路径。
技术研发人员:吴亚非,臧义华,梁佳,孟晓燕,马兴民
受保护的技术使用者:中国电子科技集团公司第十五研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!