一种多轴机器人温度控制系统及其控制方法与流程
1.本发明涉及温度控制技术领域,特别是涉及一种多轴机器人温度控制系统及其控制方法。
背景技术:
2.多轴机器人涉及单轴机械手,工业机械臂等,是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。
3.多轴机器人的电机由于长久运转,会产生巨大的热量,这些热量如果不及时散发出去会使得多轴机器人的内部环境的温度较高,较高的温度会对多轴机器人内部的电路元件尤其是电机产生损害,严重时,会导致电路板烧毁,影响多轴机器人的使用寿命。
技术实现要素:
4.为解决上述技术问题,本发明的目的在于:提供一种多轴机器人温度控制系统及其控制方法。
5.一方面,本发明提供了一种多轴机器人温度控制系统,应用于多轴机器人,所述温度控制系统包括温度检测模块、控制模块、降温模块;
6.所述降温模块设置于所述多轴机器人内部;所述温度检测模块设置与所述多轴机器人内部;
7.所述温度检测模块与所述控制模块连接,所述控制模块还与所述降温模块连接。
8.进一步,所述温度控制系统还包括显示模块,所述显示模块与所述控制模块连接。
9.进一步,所述降温模块包括半导体制冷片。
10.进一步,所述降温模块还包括散热风扇。
11.进一步,所述降温模块还包括信号调理电路,所述信号调理电路的输入端与所述温度检测模块连接,所述信号调理电路的输出端与所述控制模块连接。
12.进一步,所述温度温度检测模块包括第一电阻、热敏电阻和电压比较器;
13.所述第一电阻和热敏电阻串联得到第一节点,第一节点与所述电压比较器的同相输入端连接,所述电压比较器的反相输入端接入比较电压。
14.进一步,所述温度控制系统还包括指示灯模块,所述指示灯模块包括第一指示灯;
15.所述第一指示灯的正极与电源电压连接,所述第一指示灯的负极与所述电压比较器的输出端连接。
16.另一方面,本发明还提供了一种控制方法,应用于如前面所述的一种多轴机器人温度控制系统,所述控制方法包括以下步骤:
17.获取多轴机器人内部的温度数据;
18.根据温度数据以及负反馈调节机制对所述多轴机器人内部的电机进行温度调节。
19.进一步,所述根据温度数据以及负反馈调节机制对所述多轴机器人内部的温度进行调节这一步骤,包括以下步骤:
20.确定温度阈值;
21.根据所述温度数据和所述温度阈值确定所述多轴机器人内部的电机处于高温运行模式,控制降温模块对所述多轴机器人内部的电机进行降温;
22.根据所述温度数据和所述温度阈值确定所述多轴机器人内部的电机处于正常运行模式,控制所述降温模块停止工作。
23.本发明的有益效果是:通过温度检测模块实时获取机器人内部的温度信息,控制模块根据该温度信息判断机器人内部的温度较高,便控制降温模块工作,从而降低机器人内部的温度,起到为多轴机器人内部的电机散热的目的,降低了多轴机器人内部的电路板烧毁的风险,延长了多轴机器人的使用寿命。
附图说明
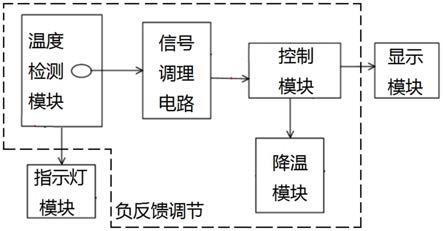
24.图1为本发明的一种多轴机器人温度控制系统的模块框图;
25.图2为本发明的温度检测模块的电路原理图;
26.图3为本发明的指示灯模块的电路原理图
27.图4为本发明的控制方法的步骤流程图。
具体实施方式
28.一种多轴机器人温度控制系统,应用于多轴机器人,参照图1,该温度控制系统包括温度检测模块、控制模块、降温模块;
29.降温模块设置于多轴机器人内部;温度检测模块设置与多轴机器人内部;
30.温度检测模块与控制模块连接,控制模块还与降温模块连接。
31.具体地,温度检测模块,用于检测多轴机器人内部的温度数据,多轴机器人中的电机工作强度高、产热量大,因此,可将温度检测模块设置在多轴机器人内部的电机的附近。同样的道理,降温模块主要是对产热量大的电机进行散热,因此,可将降温模块设置在电机的附近。
32.控制模块,起到数据处理和控制的作用。可采用现有技术中的单片机、微控制器等,在一个实施例中,控制模块包括型号为stm32系列的单片机,如stm32f103c8t6。
33.降温模块,用于根据控制模块发送的控制信号制冷,从而为多轴机器人散热。
34.从上述内容可以看出,本技术将降温模块设置在多轴机器人内部的电机处,在多轴机器人的电机在长时间或过载工作时,会散发大量的热量,利用温度检测模块实时获取机器人内部的温度信息,控制模块获取该温度信息,当判断机器人内部的电机的温度较高,表示机器人工作产生的热量较高,需要降温,那么,控制模块便触发控制信号控制降温模块工作,制冷模块开始降低机械人内部的电机的温度,起到为多轴机器人内部的电机散热的目的,降低了多轴机器人内部的电路板烧毁的风险,延长了多轴机器人的使用寿命。
35.进一步作为可选的实施方式,温度控制系统还包括显示模块,显示模块与控制模块连接。
36.具体地,本技术的温度控制模块还包括了显示模块,利用该显示模块来实时显示多轴机器人内部的温度,从而方便工作人员了解多轴机器人的工作状态,例如,当工作人员透过温度显示模块发现多轴机器人内部的温度较高时且此时制冷模块不工作时,可及时关
断多轴机器人的电源,防止多轴机器人烧毁。其中,显示模块显示的温度,是控制模块根据获取的温度信息计算得到的。
37.进一步作为可选的实施方式,降温模块包括半导体制冷片。
38.具体地,本技术提供了降温模块的一个具体的实施例,降温模块可包括半导体制冷片,半导体制冷片可靠性高,制冷效率高,可应用在空间受限的场合,可对多轴机器人内部的电机进行快速散热。
39.进一步作为可选的实施方式,降温模块还包括散热风扇。
40.具体地,降温模块还包括散热风扇,散热风扇同样具备散热的功能。散热风扇和半导体制冷片可以同时工作,也可以分开工作。同时工作时,散热风扇可以将半导体制冷片产生的冷气迅速吹散到机器人内部的各个空间内,实现快速散热的目的。
41.进一步作为可选的实施方式,降温模块还包括信号调理电路,信号调理电路的输入端与温度检测模块连接,信号调理电路的输出端与控制模块连接。
42.具体地,信号调理电路,用于将温度检测模块检测到的模拟形式的温度数据转化为数字形式的温度数据,便于控制模块接收和处理。本技术的信号调理电路可采用现有技术中的限号调理电路。
43.进一步作为可选的实施方式,参照图2,温度温度检测模块包括第一电阻r1、热敏电阻n1和电压比较器u1;
44.第一电阻r1和热敏电阻n1串联得到第一节点m,第一节点m与电压比较器u1的同相输入端连接,电压比较器u1的反相输入端接入比较电压。
45.在一个实施例中,温度检测模块可包括热敏电阻n1和型号为lm393的电压比较器u1。
46.参照图2,第一电阻r1和热敏电阻n1串联得到第一节点m,第一节点m与电压比较器u1的同相输入端连接,电压比较器u1的反相输入端接入一比较电压,当多轴机器人内部的温度升高时,热敏电阻n1的阻值升高,根据串联分压的原理可知,电压比较器u1同相输入端的电压变高,并且当同相输入端的输入电压大于反相输入端的比较电压时,电压比较器u1输出高电平信号;当多轴机器人内部的温度正常或降低,热敏电阻n1的阻值降低,那么,电压比较器u1的同相输入端的输入电压降低,当该输入电压小于反相输入端的比较电压时,电压比较器u1输出低电平信号。
47.因此,通过设置合适的反相输入端的比较电压,可以实现控制温度阈值的目的。
48.进一步作为可选的实施方式,温度控制系统还包括指示灯模块,参照3,指示灯模块包括第一指示灯d1;
49.第一指示灯d1的正极与电源电压连接,第一指示灯d1的负极与电压比较器u1的输出端连接。
50.具体地,指示灯模块,用于指示多轴机器人内部的温度状况。在一个实施例中,参照图2,指示灯模块包第一指示灯d1,第一指示灯可选择绿色的指示灯。第一指示灯d1的负极与电压比较器u1的输出端连接,第一指示灯d1的正极与电源电压连接。电压比较器u1的输出端输出高电平信号或者低电平信号,当电压比较器u1输出高电平信号时(多轴机器人内部的电机的温度较高),第一指示灯d1的两端由于都接入高电平信号,所以第一指示灯d1不亮,当电压比较器u1输出低电平信号时(多轴机器人内部的电机的温度较低或正常),第
一指示灯d1的正极接高电平信号,负极接低电平信号,第一指示灯d1亮起。此外,第二指示灯d2用于指示电源的工作情况,当电源工作不正常时,第一指示灯d1熄灭。
51.因此,可通过指示灯模块来指示当前多轴机器人内部的电机的温度情况,当机器人散热不正常或者产生的热量较高时,第一指示灯d1熄灭,工作人员可根据第一指示灯d1的点亮或熄灭情况,判断多轴机器人内部的电机的温度状况。
52.为了更加清楚地说明本技术的温度控制系统的实现原理,本技术还提供了另外一个实施例,在该实施例中,温度控制系统的温度调控的工作过程是一个负反馈的工作过程。
53.系统上电后,温度检测模块实时检测多轴机器人的温度情况,当多轴机器人内部的电机工作没有产生大量的热量时,此时,指示灯模块的第一指示灯d1亮起,当多轴机器人内部的电机工作产生大量的热量时,第一指示灯d1熄灭,控制模块获取温度检测模块检测到的温度数据,并根据温度数据大于温度阈值时,判断当前多轴机器人需要进行散热时,控制模块触发控制信号控制降温模块中的半导体制冷片和散热风扇中的至少一个部件工作,从而为多轴机器人散热;当控制模块根据实时获取的温度数据判断多轴机器人内部的温度降低到了温度阈值以下时,便控制降温模块停止工作,如此,通过负反馈调节,最终达到了控制多轴机器人内部的电机始终工作在较适合的温度的目的。
54.此外,控制模块实时接收温度检测模块获取的温度数据,并将该温度数据对应的温度显示在显示模块上,方便工作人员实时了解多轴机器人的内部温度情况。
55.第二方面,本技术还提供一种控制方法,应用于如前一方面所述的一种多轴机器人温度控制系统,参照图4,所述控制方法包括以下步骤:
56.s1、获取多轴机器人内部的温度数据;
57.s2、根据温度数据以及负反馈调节机制对所述多轴机器人内部的电机进行温度调节。
58.在多轴机器人内部的电机在长时间或过载工作时,会散发大量的热量,因此,可利用温度检测模块实时获取机器人内部的温度信息,根据获取到的温度信息可以判断多轴机器人内部的电机是否需要散热,在多轴机器人内部的电机需要散热的情况下,利用负反馈调节机制,来调整多轴机器人内部的温度,该负反馈调节机制是指,根据温度信息判断多轴机器人的电机工作时散热量较大、温度较高,则控制相应的降温装置对多轴机器人内部的电机进行降温,当判断多轴机器人内部的电机的工作温度达到一个稳定的阈值后,又控制相应的降温装置停止工作,当判断多轴机器人内部的温度又开始升高,则又接着控制相应的降温装置工作,如此反复调节控制的过程,即为负反馈调节机制。
59.由此可知,本发明的控制方法通过实时获取多轴机器人内部的该温度数据,并利用温度数据和负反馈调节机制,来调整多轴机器人内部的环境温度,使得多轴机器人内部的电机始终工作在一个合适的温度下,实现为多轴机器人内部的电机散热的目的,降低了多轴机器人内部的电路板烧毁的风险,延长了多轴机器人的使用寿命。
60.进一步作为可选的实施方式,步骤s2包括以下步骤s21-s23:
61.s21、确定温度阈值;
62.s22、根据所述温度数据和所述温度阈值确定所述多轴机器人内部的电机处于高温运行模式,控制降温模块对所述多轴机器人内部的电机进行降温;
63.s23、根据所述温度数据和所述温度阈值确定所述多轴机器人内部的电机处于正
常运行模式,控制所述降温模块停止工作。
64.具体地,本技术提供了负反馈调节机制的具体实现过程。
65.首先,确定温度阈值,该温度阈值可参考多轴机器人内部的电机的工作温度进行灵活设置。
66.当根据实时获取的温度数据确定多轴机器人内部的温度大于温度阈值时,则可以判断,多轴机器人内部的电机工作时的温度较高,该电机运行在高温运行模式,因此,控制温度控制系统中的降温模块工作,从而为多轴机器人内部的电机进行散热降温。
67.当根据实时获取的温度数据判定多轴机器人内部的温度小于或等于温度阈值时,则可以判定多轴机器人内部的电机的工作温度正常,即是电机运行在正常模式,那么,控制降温模块停止工作。
68.即,本技术的控制方法在判断电机运行在高温运行模式时,则控制降温模块工作,从而为电机降温,当判断电机运行在正常模式时,则控制降温模块停止工作,通过这样的负反馈调节机制,始终保证多轴机器人内部的电机工作在合适的温度下。
69.以上是对本发明的较佳实施进行了具体说明,但本发明并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1