一种水利工程用的清淤控制系统的制作方法
1.本实用新型涉及水利工程技术领域,尤其涉及了一种水利工程用的清淤控制系统。
背景技术:
2.河道沟渠等水利工程在建设过程中需要清理淤泥和污水,因为其能见度低、作业地形复杂、淤泥平面定位误差大以及障碍物不易规避等问题,所以需要能够提高可操作性的清淤控制系统。如申请号cn201720080939.2所示的一种清淤机器人清淤深度控制系统,包括:淤泥层高度传感器,用以检测淤泥层的实际高度,并将淤泥层的实际高度数据发送给plc控制器;一体化工控机,发送人工设定的清淤深度数据给plc控制器;plc控制器,接受来自淤泥层高度传感器的数据和来自一体化工控机的数据,通过分析处理后,将清淤深度调节数据发送给驱动电机;驱动电机,接受来自plc控制器的数据,并为深度调节装置提供动力;深度调节装置,调整清淤机器人的清淤深度;所述淤泥层高度传感器与plc控制器相连,所述plc控制器与驱动电机相连,所述驱动电机与深度调节装置相连,所述plc控制器还与一体化工控机相连。上述专利能够帮助清淤机器人适应水下淤泥层高低不平的环境,精确控制清淤机器人的清淤深度,确保清理后的淤泥层上下高度一致,避免漏挖或多挖淤泥。但是上述专利功能较单一,工作效率不能满足需要,而本实用新型通过清淤控制系统高效、快速的对河道或沟渠内的淤泥进行清淤处理,采用反馈机制,提高了系统工作效率,提高了操作人员对设备控制的灵活性。
技术实现要素:
3.本实用新型针对现有技术中河道沟渠淤泥清理困难,效率低的缺点,提供了一种水利工程用的清淤控制系统。
4.为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
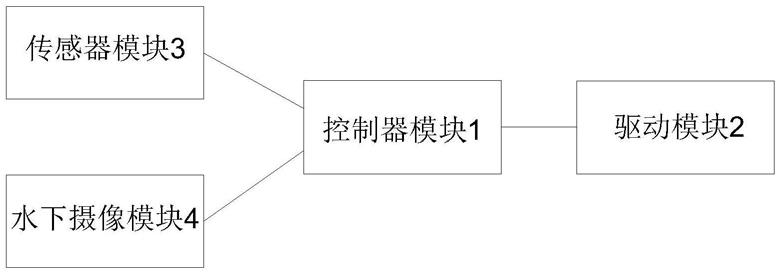
5.一种水利工程用的清淤控制系统,包括控制器模块、驱动模块、传感器模块和水下摄像模块,控制器模块为plc控制器,驱动模块包括淤泥泵、水泵、电动液压杆和转向轮,传感器模块包括位置传感器、水位传感器和红外传感器,水下摄像模块为水下摄像机,plc控制器的输入端与位置传感器、水位传感器、红外传感器和水下摄像机连接,plc控制器的输出端与淤泥泵、水泵、电动液压杆和转向轮连接。由于位置传感器、水位传感器、红外传感器使系统具备躲避障碍功能和检测水位、淤泥深度功能与水下摄像机配合,共同形成反馈机制。
6.作为优选,电动液压杆连接有驱动臂,驱动臂连接有升降筒,位置传感器、水位传感器、红外传感器和水下摄像机设在升降筒内。水位传感器对水下淤泥水的深度进行信号采集,红外传感器对水下淤泥中的障碍物进行信号采集,同时位置传感器对前进路径进行信号采集,将采集到的各个信号共同送入plc控制器进行处理,再将结果输出到驱动模块,进而驱动淤泥泵、电动液压杆和转向轮,水下摄像机采集水下画面传送给操作员。
7.作为优选,还包括箱体,箱体内设有储水箱和排污箱,水泵的进水口与储水箱连接,水泵的出水口连接有水管,水管端部连接有冲水枪,淤泥泵的出水口与排污箱连接,淤泥泵的进水口连接有吸污管,升降筒的下端设有吸污头,吸污管穿入升降筒内与吸污头连接。吸污头吸取淤泥污水进入排污箱,水泵、水管和冲水枪对驱动臂、升降筒和排污箱进行清洗。
8.作为优选,电动液压杆包括第一液压杆和第二液压杆,驱动臂包括前臂和后臂,前臂与箱体铰接,后臂与前臂铰接,第一液压杆的底座与箱体连接,第一液压杆的杆端与前臂连接,第二液压杆的底座与前臂连接,第二液压杆的杆端与后臂连接,后臂与升降筒连接。第一液压杆和第二液压杆驱动前臂和后臂使升降筒的活动范围更大,移动灵活。
9.作为优选,箱体内还设有设备箱,plc控制器设在设备箱内,转向轮设在箱体底部。使箱体可以移动,避开障碍物。
10.作为优选,排污箱包括储泥箱和集水箱,储泥箱和集水箱之间设有过滤网,储泥箱上设有取泥口,集水箱上设有排水口。淤泥进入储泥箱后,淤泥和泥水经过滤网过滤,淤泥留在储泥箱,泥水排入集水箱,最后经取泥口和排水口再处理。
11.本实用新型由于采用了以上技术方案,具有显著的技术效果:由于位置传感器、水位传感器、红外传感器使系统具备躲避障碍功能和检测水位、淤泥深度功能与水下摄像机配合,共同形成反馈机制,水位传感器对水面到升降筒的高度进行信号采集,红外传感器对水下淤泥中的障碍物进行信号采集,同时位置传感器对前进路径进行信号采集,将采集到的各个信号共同送入plc控制器进行处理,再将处理结果的信号输出到驱动模块,进而驱动淤泥泵、电动液压杆和转向轮,plc控制器基于水位传感器的信号控制电动液压杆工作,当plc控制器判断水位传感器的数据显示水面到升降筒有高度差时,plc控制器信号传输给淤泥泵,此时淤泥泵不工作,然后电动液压杆工作控制驱动臂使升降筒下降,吸污头进入淤泥水内,当plc控制器判断水位传感器的数据显示水面到升降筒没有高度差时,plc控制器信号传输给淤泥泵,淤泥泵开始工作;plc控制器基于红外传感器的信号控制转向轮工作,当plc控制器判断红外传感器的数据显示水下淤泥中有障碍物时,plc控制器发送信号给转向轮,躲避障碍物;水下摄像机采集水下画面传送给操作员,第一液压杆和第二液压杆驱动前臂和后臂使升降筒的活动范围更大,移动灵活,淤泥进入储泥箱后,淤泥和泥水经过滤网过滤,淤泥留在储泥箱,泥水排入集水箱,最后经取泥口和排水口再处理。本实用新型通过清淤控制系统高效、快速的对河道或沟渠内的淤泥进行清淤处理,采用反馈机制,提高了系统工作效率,提高了操作人员对设备控制的灵活性。
附图说明
12.图1是本实用新型的结构示意图。
13.图2是本实用新型的系统结构示意图。
14.图3是箱体、驱动臂、升降筒的结构示意图。
15.图4是图3中a的局部放大图。
16.以上附图中各数字标号所指代的部位名称如下:其中,1—控制器模块、2—驱动模块、3—传感器模块、4—水下摄像模块、5—plc控制器、6—淤泥泵、7—水泵、8—电动液压杆、9—转向轮、10—位置传感器、11—水位传感器、12—红外传感器、13—水下摄像机、14—
驱动臂、15—升降筒、16—箱体、17—储水箱、18—排污箱、19—水管、20—冲水枪、21—吸污管、22—吸污头、23—设备箱、24—储泥箱、25—集水箱、26—过滤网、27—取泥口、28—排水口、29—第一液压杆、30—第二液压杆、31—前臂、32—后臂。
具体实施方式
17.下面结合附图与实施例对本实用新型作进一步详细描述。
18.实施例1
19.一种水利工程用的清淤控制系统,如图1
‑
4所示,包括控制器模块1、驱动模块2、传感器模块3和水下摄像模块4,控制器模块1为plc控制器5,驱动模块2包括淤泥泵6、水泵7、电动液压杆8和转向轮9,传感器模块3包括位置传感器10、水位传感器11和红外传感器12,水下摄像模块4为水下摄像机13,plc控制器5的输入端与位置传感器10、水位传感器11、红外传感器12和水下摄像机13连接,plc控制器5的输出端与淤泥泵6、水泵7、电动液压杆8和转向轮9连接。由于位置传感器10、水位传感器11、红外传感器12使系统具备躲避障碍功能和检测水位、淤泥深度功能与水下摄像机13配合,共同形成反馈机制。
20.电动液压杆8连接有驱动臂14,驱动臂14连接有升降筒15,位置传感器10、水位传感器11、红外传感器12和水下摄像机13设在升降筒15内。水位传感器11对水面到升降筒15的高度进行信号采集,红外传感器12对水下淤泥中的障碍物进行信号采集,同时位置传感器10对前进路径进行信号采集,将采集到的各个信号共同送入plc控制器5进行处理,再将结果输出到驱动模块2,进而驱动淤泥泵6、电动液压杆8和转向轮9,水下摄像机13采集水下画面传送给操作员。
21.还包括箱体16,箱体16内设有储水箱17和排污箱18,水泵7的进水口与储水箱17连接,水泵7的出水口连接有水管19,水管19端部连接有冲水枪20,淤泥泵6的出水口与排污箱18连接,淤泥泵6的进水口连接有吸污管21,升降筒15的下端设有吸污头22,吸污管21穿入升降筒15内与吸污头22连接。吸污头22吸取淤泥污水进入排污箱18,水泵7、水管19和冲水枪20对驱动臂14、升降筒15和排污箱18进行清洗。
22.电动液压杆8包括第一液压杆29和第二液压杆30,驱动臂14包括前臂31和后臂32,前臂31与箱体16铰接,后臂32与前臂31铰接,第一液压杆29的底座与箱体16连接,第一液压杆29的杆端与前臂31连接,第二液压杆30的底座与前臂31连接,第二液压杆30的杆端与后臂32连接,后臂32与升降筒15连接。第一液压杆29和第二液压杆30驱动前臂31和后臂32使升降筒15的活动范围更大,移动灵活。
23.箱体16内还设有设备箱23,plc控制器5设在设备箱23内,转向轮9设在箱体16底部。使箱体16可以移动,避开障碍物。
24.排污箱18包括储泥箱24和集水箱25,储泥箱24和集水箱25之间设有过滤网26,储泥箱24上设有取泥口27,集水箱25上设有排水口28。淤泥进入储泥箱24后,淤泥和泥水经过滤网26过滤,淤泥留在储泥箱24,泥水排入集水箱25,最后经取泥口27和排水口28再处理。
25.工作原理:由于位置传感器10、水位传感器11、红外传感器12使系统具备躲避障碍功能和检测水位、淤泥深度功能与水下摄像机13配合,共同形成反馈机制,水位传感器11对水面到升降筒15的高度进行信号采集,红外传感器12对水下淤泥中的障碍物进行信号采集,同时位置传感器10对前进路径进行信号采集,将采集到的各个信号共同送入plc控制器
5进行处理,再将处理结果的信号输出到驱动模块2,进而驱动淤泥泵6、电动液压杆8和转向轮9,plc控制器5基于水位传感器11的信号控制电动液压杆8工作,当plc控制器5判断水位传感器11的数据显示水面到升降筒15有高度差时,plc控制器5信号传输给淤泥泵6,此时淤泥泵6不工作,然后电动液压杆8工作控制驱动臂14使升降筒15下降,吸污头22进入淤泥水内,当plc控制器5判断水位传感器11的数据显示水面到升降筒15没有高度差时,plc控制器5信号传输给淤泥泵6,淤泥泵6开始工作;plc控制器5基于红外传感器12的信号控制转向轮9工作,当plc控制器5判断红外传感器12的数据显示水下淤泥中有障碍物时,plc控制器5发送信号给转向轮9,躲避障碍物;水下摄像机13采集水下画面传送给操作员,第一液压杆29和第二液压杆30驱动前臂31和后臂32使升降筒15的活动范围更大,移动灵活,淤泥进入储泥箱24后,淤泥和泥水经过滤网26过滤,淤泥留在储泥箱24,泥水排入集水箱25,最后经取泥口27和排水口28再处理。本实用新型通过清淤控制系统高效、快速的对河道或沟渠内的淤泥进行清淤处理,采用反馈机制,提高了系统工作效率,提高了操作人员对设备控制的灵活性。
26.实施例2
27.一种水利工程用的清淤控制系统,如图1
‑
2所示,包括控制器模块1、驱动模块2、传感器模块3和水下摄像模块4,控制器模块1为plc控制器5,驱动模块2包括淤泥泵6、水泵7、电动液压杆8和转向轮9,传感器模块3包括位置传感器10、水位传感器11和红外传感器12,水下摄像模块4为水下摄像机13,plc控制器5的输入端与位置传感器10、水位传感器11、红外传感器12和水下摄像机13连接,plc控制器5的输出端与淤泥泵6、水泵7、电动液压杆8和转向轮9连接。由于位置传感器10、水位传感器11、红外传感器12使系统具备躲避障碍功能和检测水位、淤泥深度功能与水下摄像机13配合,共同形成反馈机制。
28.实施例3
29.一种水利工程用的清淤控制系统,如图1
‑
3所示,包括控制器模块1、驱动模块2、传感器模块3和水下摄像模块4,控制器模块1为plc控制器5,驱动模块2包括淤泥泵6、水泵7、电动液压杆8和转向轮9,传感器模块3包括位置传感器10、水位传感器11和红外传感器12,水下摄像模块4为水下摄像机13,plc控制器5的输入端与位置传感器10、水位传感器11、红外传感器12和水下摄像机13连接,plc控制器5的输出端与淤泥泵6、水泵7、电动液压杆8和转向轮9连接。由于位置传感器10、水位传感器11、红外传感器12使系统具备躲避障碍功能和检测水位、淤泥深度功能与水下摄像机13配合,共同形成反馈机制。
30.电动液压杆8连接有驱动臂14,驱动臂14连接有升降筒15,位置传感器10、水位传感器11、红外传感器12和水下摄像机13设在升降筒15内。水位传感器11对水下淤泥的深度进行信号采集,红外传感器12对水下淤泥中的障碍物进行信号采集,同时位置传感器10对前进路径进行信号采集,将采集到的各个信号共同送入plc控制器5进行处理,再将结果输出到驱动模块2,进而驱动淤泥泵6、电动液压杆8和转向轮9,水下摄像机13采集水下画面传送给操作员。
31.还包括箱体16,箱体16内设有储水箱17和排污箱18,水泵7的进水口与储水箱17连接,水泵7的出水口连接有水管19,水管19端部连接有冲水枪20,淤泥泵6的出水口与排污箱18连接,淤泥泵6的进水口连接有吸污管21,升降筒15的下端设有吸污头22,吸污管21穿入升降筒15内与吸污头22连接。吸污头22吸取淤泥污水进入排污箱18,水泵7、水管19和冲水
枪20对驱动臂14、升降筒15和排污箱18进行清洗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1