用于低轨卫星的动中通相控阵天线的制作方法
1.本实用新型涉及一种相控阵天线,尤其涉及一种用于低轨卫星的动中通相控阵天线。
背景技术:
2.现有船载动动中通天线产品用于高轨静止卫星通信,一般采用三轴伺服转台和反射面天线组合的形式,三轴转动用于隔离船舶俯仰、横滚、航向运动,从而使反射面天线稳定指向静止卫星。
3.而低轨卫星通常是数百颗及以上通信卫星组成的通信卫星星座,从地面来看卫星,高轨静止卫星是静止不动的,而低轨卫星是快速运动的,当前船载动动中通天线跟踪的卫星离开天空视野后,需要重新指向另一颗在天空视野的卫星,由于伺服转台转速限制,指向新的卫星需要一定时间,通常需要秒至十米秒级的时间,这时通信将中断。
4.相控阵天线在调整指向时采用电控扫描的方式,在微秒至毫秒级就可以完成重新指向,可有效防止通信中断的发生。但相控阵天线指向扫描范围通常为法向
±
60
°
以内,由于作为载体的船舶晃动,将使相控阵指向范围进一步收缩。不适用于进行低轨卫星大范围的移动的跟踪。因此,现有技术有待改进。
技术实现要素:
5.本实用新型要解决的技术问题是提供一种用于低轨卫星的动中通相控阵天线,采用机械转向执行机构,根据卫星移动方向进行角度补偿以及进行姿态校正隔离载体的晃动,扩大相控阵的指向扫描范围,使其满足船载和低轨使用需求。
6.本实用新型为解决上述技术问题而采用的技术方案是提供一种用于低轨卫星的动中通相控阵天线,包括天线主体、机械转向补偿机构和控制器,所述机械转向补偿机构包括天线安装平台、转向执行单元和底座,所述底座固定安装在运动载体上,所述天线主体固定在天线安装平台上,所述天线安装平台通过转向执行单元连接到底座,所述转向执行单元带动天线安装平台和天线主体在底座上转动;所述天线安装平台上设置有方位传感单元和运动传感单元,所述天线主体、转向执行单元、方位传感单元和运动传感单元与控制器电连接。
7.进一步地,所述天线主体发射和接收对卫星通信的电磁波,所述方位传感单元和运动传感单元获取天线主体的方位和姿态信息并发送到控制器;所述转向执行单元带动天线安装平台和天线主体相对于底座进行俯仰运动和滚转运动;所述控制器通过天线主体接收的电磁能量信息控制天线主体调整电扫描角度并控制转向执行单元调整天线主体的姿态和方位;所述天线主体的电扫描角度的调整范围为法向
±
60
°
。
8.进一步地,所述方位传感单元包括gnss双天线测向模块和/或陀螺罗经,所述方位传感单元实时检测天线主体的方位;所述运动传感单元包括三轴加速度计和三轴陀螺仪,所述运动传感单元实时检测天线主体的姿态。
9.进一步地,所述转向执行单元包括至少三个电动推杆,所述电动推杆的通过运动副连接到底座和天线安装平台,调节所述电动推杆的长度实现天线安装平台的姿态调整。
10.进一步地,所述转向执行单元包括外部运动框架和内部运动框架,所述外部运动框架与底座连接并由外框电机带动相对底座进行俯仰运动;所述内部运动框架设置在外部运动框架中随外部运动框架进行俯仰运动,所述外部运动框架上设置有内框电机,所述内框电机与外框电机在外部运动框架所在平面内垂直正交,所述内框电机带动内部运动框架进行转动构成垂直于俯仰运动的滚转运动,所述天线安装平台固定在内部运动框架中。
11.本实用新型对比现有技术有如下的有益效果:本实用新型提供的用于低轨卫星的动中通相控阵天线,通过机械转向执行机构,根据卫星移动方向在天线主体扫描前进行角度补偿;在天线主体扫描前进行姿态校正隔离载体的晃动;扩大相控阵的指向扫描范围的同时降低天线主体实时扫描难度,补偿和校正在扫描之前完成,不需要占用扫描跟随时间,跟踪速度更快,满足船载和低轨使用需求。
附图说明
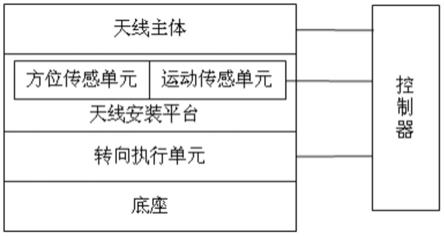
12.图1为本实用新型实施例的用于低轨卫星的动中通相控阵天线结构示意图;
13.图2为本实用新型实施例的一种机械转向补偿机构示意图;
14.图3为本实用新型实施例的另一种机械转向补偿机构示意图;
15.图4为本实用新型实施例的用于低轨卫星的动中通相控阵天线工作流程图。
16.图中:
17.1、底座;2、天线安装平台;3、电动推杆;4、外部运动框架;5、外框电机;6、内部运动框架;7、内框电机。
具体实施方式
18.下面结合附图和实施例对本实用新型作进一步的描述。
19.图1为本实用新型实施例的用于低轨卫星的动中通相控阵天线结构示意图。
20.请参见图1,本实用新型实施例的用于低轨卫星的动中通相控阵天线,包括天线主体、机械转向补偿机构和控制器,所述机械转向补偿机构包括天线安装平台、转向执行单元和底座;所述天线主体固定在天线安装平台上,所述天线安装平台通过转向执行单元连接到底座,所述底座固定安装在运动载体上,所述转向执行单元带动天线安装平台和天线主体在底座上转动;所述天线安装平台上设置有方位传感单元和运动传感单元,所述天线主体、转向执行单元、方位传感单元和运动传感单元与控制器电连接。
21.具体地,天线主体发射和接收对卫星通信的电磁波,所述方位传感单元和运动传感单元获取天线主体的方位和姿态信息并发送到控制器;所述转向执行单元带动天线安装平台和天线主体相对于底座进行俯仰运动和滚转运动;所述控制器通过天线主体接收的电磁能量信息控制天线主体调整电扫描角度并控制转向执行单元调整天线主体的姿态和方位;所述天线主体的电扫描角度的调整范围为法向
±
60
°
。
22.具体地,方位传感单元包括gnss双天线测向模块和/或陀螺罗经,所述方位传感单元实时检测天线主体的方位;所述运动传感单元包括三轴加速度计和三轴陀螺仪,所述运动传感单元实时检测天线主体的姿态。
23.gnss(global navigation satellite system)是指全球导航卫星系统,gnss双天线测向模块携带有北斗天线和gps天线,测量精度高,定位定向准确。
24.请同时参见图2,在一实施例中,转向执行单元包括至少三个电动推杆3,所述电动推杆3的通过运动副连接到底座1和天线安装平台2,调节所述电动推杆3的长度实现天线安装平台2的姿态调整。受限于电动推杆3的机械限制,转向执行单元各方向的调整角度在
±
90
°
之内。
25.运动副是两构件直接接触并能产生相对运动的活动联接。两个构件上参与接触而构成运动副的点、线、面等元素被称为运动副元素。运动副包含球铰链,虎克铰链,铰链等。运动副通常包括3自由度运动副和6自由度运动副。三自由度运动副连接三个电动推杆3,电动推杆3与底座1通过铰链连接,与天线安装平台2通过球铰,虎克铰链等万向结构连接:六自由度运动副连接六个电动推杆3,电动推杆3与底座1通过虎克铰连接,与天线安装平台2通过球铰或虎克铰链连接。
26.请同时参见图3,在另一实施例中,转向执行单元包括外部运动框架4和内部运动框架6,外部运动框架4与底座1连接并由外框电机5带动相对底座1进行俯仰运动;外部运动框架4上设置有内框电机7,所述内框电机7与外框电机5在外部运动框架4所在平面内垂直正交,所述内框电机7带动内部运动框架6进行转动,构成垂直于俯仰运动的滚转运动,天线安装平台固定在内部运动框架6中。内部运动框架6和外部运动框架4的转动范围为0
°‑
360
°
27.请参见图4,本实用新型实施例的用于低轨卫星的动中通相控阵天线的工作过程如下:
28.s1:控制器读取方位传感单元和运动传感单元数据,获取天线主体当前方位和姿态信息;
29.s2:控制器控制转向执行单元进行天线主体的姿态校正和/或姿态补偿;
30.s3:控制器根据天线主体的方位信息、姿态信息和卫星星历信息,计算得到天线本体坐标系下的卫星的方位角和俯仰角,并控制天线主体的无线电波束指向卫星;
31.s4:天线主体收到卫星信号后,控制器控制天线主体在卫星周围进行电扫描寻找电磁能量最强信号方位,并控制天线主体的无线电波束始终指向电磁能量最强信号方位,实现卫星信号持续跟踪;
32.s5:重复步骤s1、s2和s4,使得天线主体与卫星持续通信。
33.具体地,步骤s2中天线主体的姿态校正包括:所述转向执行单元调整天线主体姿态使得天线主体的姿态向俯仰角和滚转角减小的方向运动,直到运动传感单元检测的天线主体的俯仰角和滚转角为零,从而在运动载体姿态不断变化的情况下动态的控制天线主体进行姿态校正,使得天线主体始终处于水平状态。隔离了船舶的晃动影响。
34.具体地,步骤s2天线主体的姿态补偿包括:控制器根据卫星星历信息预判当前卫星移动方向,结合当前船舶晃动情况,在卫星到达相控阵扫描边界之前,预设天线主体的姿态补偿角度x,所述转向执行单元调整天线主体姿态使得天线主体的姿态角度增加x,完成天线主体的姿态补偿。由于天线主体的电扫描角度的调整范围为法向
±
60
°
,相控阵扫描边界即为天线主体法向
±
60
°
。
35.具体地,步骤s2中天线主体的姿态校正和姿态补偿包括;控制器根据卫星星历信息预判当前卫星移动方向,结合当前船舶晃动情况,在卫星到达相控阵扫描边界之前,预设
天线主体的姿态补偿角度x,当船体晃动角度为y时,即天线主体姿态为x+y从而偏离了补偿角度x时,所述转向执行单元调整天线主体姿态使得天线主体的姿态向接近姿态补偿角度x的方向运动,直到方位传感单元和运动传感单元检测的天线主体的姿态角度为姿态补偿角度x,从而隔离船舶晃动角度y,从而在运动载体姿态不断变化的情况下动态的控制天线主体进行姿态补偿和姿态校正,使得天线主体的姿态角度始终为姿态补偿角度x。
36.具体地,步骤s3包括:
37.s31:根据天线主体的方位信息和卫星星历信息,运用sgp4算法计算当前时刻卫星相对于天线的方位角和俯仰角;
38.通过gps获取天线主体的位置信息,即经纬度信息,获取卫星两行星历,运用sgp4算法计算当前时刻卫星相对于天线的方位角和俯仰角
39.s32:根据步骤s21中计算所得卫星相对于天线的方位角及俯仰角,计算大地坐标系下卫星的坐标;
40.s33:根据天线主体的姿态信息,通过坐标系变换,得到天线坐标系中卫星的坐标;
41.s34:根据步骤s23中得到的卫星坐标,计算得到天线坐标系下的卫星的方位角和俯仰角。
42.在一具体实施例中,天线主体在俯仰轴的扫描范围为法向
±
60
°
即俯仰角度为30
°‑
150
°
,载体为船舶,当船舶在俯仰角度进行
±
10
°
的长周期(船舶运动周期通常为数秒)运动时,天线主体扫描范围叠加船舶晃动,天线主体最终输出的俯仰角的一个边界为40
°‑
160
°
,另一个边界为20
°‑
140
°
。如果通信卫星仰角在35
°
,天线主体将无法与卫星保持连续通信。
43.进行天线主体的姿态校正,控制转向执行单元向调整天线主体姿态向俯仰角为零的方向移动,隔离船舶晃动影响,天线主体最终输出的俯仰角为30
°‑
150
°
,此时天线主体与35
°
仰角的卫星可保持连续通信。
44.进行天线主体的姿态补偿,控制器根据卫星星历信息,预判当前卫星移动方向,预设天线主体的姿态补偿角度为俯仰角
‑
20
°
,天线主体俯仰角度为30
°‑
150
°
,控制转向执行单元叠加姿态补偿角度后,天线主体俯仰角度为10
°‑
130
°
,叠加船舶俯仰运动俯仰角度
±
10
°
,最终俯仰角的一个边界为20
°‑
140
°
,另一个边界为0
°‑
120
°
,此时天线主体与35
°
仰角的卫星可保持连续通信。
45.进行天线主体的姿态补偿和姿态校正,控制器根据卫星星历信息,预判当前卫星移动方向,预设天线主体的姿态补偿角度为俯仰角
‑
20
°
,天线主体俯仰角度为30
°‑
150
°
,控制转向执行单元叠加姿态补偿角度后,天线主体俯仰角度为10
°‑
130
°
,控制转向执行单元向调整天线主体姿态向俯仰角为
‑
20
°
的方向移动,隔离船舶晃动影响,天线主体最终输出的俯仰角为10
°‑
130
°
,此时天线主体与35
°
仰角的卫星可保持连续通信。
46.当前跟踪的卫星离开天空视野后,跟踪新的卫星时,转向执行单元根据星历进行预判,提前输出新的姿态补偿角度,然后进一步后续通信。
47.综上所述,本实用新型实施例的用于低轨卫星的动中通相控阵天线,通过机械转向执行机构,根据卫星移动方向在天线主体扫描前进行角度补偿;在天线主体扫描前进行姿态校正隔离载体的晃动;扩大相控阵的指向扫描范围的同时降低天线主体实时扫描难度,补偿和校正在扫描之前完成,不需要占用扫描跟随时间,跟踪速度更快,满足船载和低
轨使用需求。
48.虽然本实用新型已以较佳实施例揭示如上,然其并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型的精神和范围内,当可作些许的修改和完善,因此本实用新型的保护范围当以权利要求书所界定的为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1