拆楼机防倾翻控制装置的制作方法
1.本实用新型涉及拆楼机安全技术领域,具体为一种拆楼机防倾翻控制装置。
背景技术:
2.拆楼机与普通挖掘机的最大区别在于前端工作装置的不同,也就是工作用途不同:普通挖掘机的大小臂一般为两段式,前端是挖斗,其主要作用是进行挖掘、装载作业;拆楼机的大小臂一般为三段式(俗称拆楼加长臂),前端是液压剪或破碎锤,其主要作用是进行楼房等建筑物的拆除作业,“拆楼机”的名称由此而来。
3.拆楼机的回转平台在底盘上旋转,三段式大小臂底部铰接在回转平台上,由于拆楼机的三段式大小臂完全伸直后长度较长,如果三段式大小臂的重心偏移距离超过安全范围,就会造成拆楼机倾翻的危险。
技术实现要素:
4.本实用新型的目的在于提供一种对拆除机工作状态进行监测,在危险工况时,可以及时控制电磁阀,切断工作装置往重心偏移方向运动,防止拆除机倾翻的拆楼机防倾翻控制装置。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种拆楼机防倾翻控制装置,包括拆楼机,所述的拆楼机设有底盘、回转平台、油缸驱动的动臂、中臂、斗杆,还包括控制器,所述的回转平台可旋转连接在底盘上,所述的动臂一端与回转平台可旋转连接,所述的中臂两端分别与动臂另一端、斗杆一端可旋转连接;所述的动臂设有控制油缸缩方向的电磁阀a,所述的中臂设有控制油缸缩方向的电磁阀b、控制油缸伸方向的电磁阀c,所述的斗杆设有控制油缸缩方向的电磁阀d、控制油缸伸方向的电磁阀e;所述的回转平台上设有双轴倾角传感器;所述的动臂与回转平台连接处设有第一角度传感器,所述的中臂与动臂连接处设有第二角度传感器,所述的中臂与斗杆连接处设有第三角度传感器;所述的电磁阀a、电磁阀b、电磁阀c、电磁阀d、电磁阀e、双轴倾角传感器、第一角度传感器、第二角度传感器、第三角度传感器均与控制器电连接。
7.作为本实用新型优选的方案,所述的控制器设有开关量输入调理电路、模拟量输入调理电路、can隔离驱动电路、电源变换电路、cpu中央处理单元、输出驱动电路,所述的开关量输入调理电路、模拟量输入调理电路、can隔离驱动电路、电源变换电路、输出驱动电路分别与cpu中央处理单元电连接;所述的模拟量输入调理电路分别与双轴倾角传感器、第一角度传感器、第二角度传感器、第三角度传感器电连接;所述的输出驱动电路分别与电磁阀a、电磁阀b、电磁阀c、电磁阀d、电磁阀e电连接;所述的电源变换电路与电源连接。
8.作为本实用新型优选的方案,所述的开关量输入调理电路连接急停按钮。
9.作为本实用新型优选的方案,所述的can隔离驱动电路连接设定显示仪表。
10.作为本实用新型优选的方案,所述的输出驱动电路还连接报警喇叭、报警灯。
11.作为本实用新型优选的方案,所述的cpu中央处理单元包括输入输出处理模块、显
示与设置参数协议处理模块、通讯模块、拆除机运动学算法模块和危险工况判定模块。
12.作为本实用新型优选的方案,所述的动臂与回转平台连接处、中臂与动臂连接处、中臂与斗杆连接处分别设有回转轴,所述的回转轴一端设有弹性联轴器,所述的第一角度传感器、第二角度传感器、第三角度传感器分别与弹性联轴器连接,所述的第一角度传感器、第二角度传感器、第三角度传感器分别通过固定件固定在回转平台或动臂或中臂或斗杆上。
13.本方案中,通过对第一角度传感器、第二角度传感器、第三角度传感器3个传感器测量的角度,运用运动学计算公式,实时计算拆除机工作装置的水平方向投影长度;1个双轴倾角传感器安装在拆除机回转平台上,用于测量回转平台的2个轴向倾角,并根据不同的倾角,确定安全的工作装置水平投影长度;5个电液开关阀分别为控制动臂油缸缩方向电磁阀a、控制中臂油缸缩方向电磁阀b、控制中臂油缸伸方向电磁阀c、控制斗杆油缸缩方向电磁阀d、控制斗杆油缸伸方向电磁阀e,以上电磁阀均为通电工作,只有电磁阀工作时,操作人员才能操作相应的工作装置油缸运动;
14.控制器是整个系统的核心,主要由开关量输入调理电路、模拟量输入调理电路、can隔离驱动电路、电源变换电路、cpu中央处理单元、输出驱动电路组成,各部分功能如下:电源变换电路将工程机械供电系统12的12v或24v供电电压转化为系统内部的3.3v、5v和12v电源,给各系统供电;
15.其中,开关输入调理电路检测急停按钮信号,用于紧急切断各驱动电磁阀;can隔离驱动电路与设定显示仪表进行通讯,用于拆除机各状态显示、拆除机工作参数和尺寸参数设置,以及用示波器形式或数字方式显示并记录拆除机各关节角度、平台倾角、运动轨迹等实时参数;输出驱动电路组成用于驱动报警喇叭、报警灯和5个电液开关阀,确保拆除机达到危险工况时切断往危险方向运动的油缸回路,不受操作手柄控制,同时声光报警提示;
16.cpu中央处理及存储单元实时采集各角度传感器和倾角传感器数据,通过标准的拆除机运动学算法,完成拆除机工作装置水平投影长度,并根据回转平台倾角,确定工作装置水平方向安全投影范围,当有超出时,及时切断相关的电液开关阀,防止工作装置继续往危险方向运动。
17.cpu中央处理及存储单元系统结构主要由输入输出处理模块、显示与设置参数协议处理模块、通讯模块、拆除机运动学算法模块和危险工况判定模块等模块组成;
18.其中,输入输出处理模块采集各铰点处角度、回转平台倾角、急停开关状态,并进行滤波抗干扰处理;显示与设置参数协议处理模块对采集的传感器数据、急停开关状态、工作装置水平投影长度和电液开关阀的工作状态等数据进行协议打包成一定格式的数据帧,用于设定显示仪表的显示,同理对设定显示仪表传送来的设置数据帧进行协议解包,并将设置数据存入eeprom存储器中,用于其它模块的调用;拆除机运动学算法模块根据拆除机回转平台和各工作装置的尺寸、各铰点处角度,通过dh坐标转换,计算当前工作装置在水平方向的投影长度。
19.与现有技术相比,本实用新型的有益效果是:可对拆除机工作状态进行实时监测,在危险工况时,可以及时控制电磁阀,切断工作装置往重心偏移方向运动,防止拆除机倾翻。
附图说明
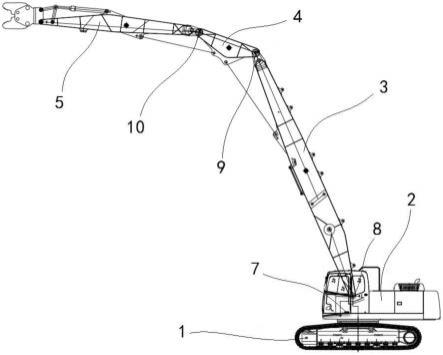
20.图1为本实用新型拆楼机的整体结构示意图;
21.图2为本实用新型控制器的结构示意图;
22.图3为本实用新型控制器的电路结构示意图;
23.图4为本实用新型控制器的控制原理示意图;
24.图5为本实用新型角度传感器的安装结构示意图。
25.图中:1、底盘
ꢀꢀꢀ
2、回转平台
ꢀꢀꢀ
3、动臂
ꢀꢀꢀ
4、中臂
26.5、斗杆
ꢀꢀꢀ
6、控制器
ꢀꢀꢀ
7、倾角传感器
ꢀꢀꢀ
8、第一角度传感器
27.9、第二角度传感器
ꢀꢀꢀ
10、第三角度传感器
ꢀꢀꢀ
11、回转轴
28.12、弹性联轴器
ꢀꢀꢀ
13、固定件
ꢀꢀꢀ
14、报警喇叭
ꢀꢀꢀ
15、报警灯
29.16、显示仪表
ꢀꢀꢀ
17、急停按钮。
具体实施方式
30.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。给出了本实用新型的若干实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容更加透彻全面。
31.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
32.请参阅图1-5,本实用新型提供一种技术方案:
33.拆楼机防倾翻控制装置,包括拆楼机,拆楼机设有底盘1、回转平台2、油缸驱动的动臂3、中臂4、斗杆5,还包括控制器6,回转平台2可旋转连接在底盘1上,动臂3一端与回转平台2可旋转连接,中臂4两端分别与动臂3另一端、斗杆5一端可旋转连接;动臂3设有控制油缸缩方向的电磁阀a,中臂4设有控制油缸缩方向的电磁阀b、控制油缸伸方向的电磁阀c,斗杆5设有控制油缸缩方向的电磁阀d、控制油缸伸方向的电磁阀e;回转平台2上设有双轴倾角传感器7;动臂3与回转平台2连接处设有第一角度传感器8,中臂4与动臂3连接处设有第二角度传感器9,中臂4与斗杆5连接处设有第三角度传感器10;电磁阀a、电磁阀b、电磁阀c、电磁阀d、电磁阀e、双轴倾角传感器7、第一角度传感器8、第二角度传感器9、第三角度传感器10均与控制器6电连接。
34.控制器6设有开关量输入调理电路、模拟量输入调理电路、can隔离驱动电路、电源变换电路、cpu中央处理单元、输出驱动电路,开关量输入调理电路、模拟量输入调理电路、can隔离驱动电路、电源变换电路、输出驱动电路分别与cpu中央处理单元电连接;模拟量输入调理电路分别与双轴倾角传感器、第一角度传感器、第二角度传感器、第三角度传感器电连接;输出驱动电路分别与电磁阀a、电磁阀b、电磁阀c、电磁阀d、电磁阀e电连接;电源变换电路与电源连接。
35.开关量输入调理电路连接急停按钮17。
36.can隔离驱动电路连接设定显示仪表16。
37.输出驱动电路还连接报警喇叭14、报警灯15。
38.cpu中央处理单元包括输入输出处理模块、显示与设置参数协议处理模块、通讯模块、拆除机运动学算法模块和危险工况判定模块。
39.动臂3与回转平台2连接处、中臂4与动臂3连接处、中臂4与斗杆5连接处分别设有回转轴11,回转轴11一端设有弹性联轴器12,第一角度传感器、第二角度传感器、第三角度传感器分别与弹性联轴器12连接,第一角度传感器、第二角度传感器、第三角度传感器分别通过固定件13固定在回转平台或动臂或中臂或斗杆上。
40.具体使用过程是:使用时,用危险工况判定模块对计算得到的工作装置在水平方向的投影长度、回转平台倾角和急停开关状态等数据根据一定的规则进行危险工况判定,在常见的拆楼机规格下,采用如下限制:
41.1、工作装置,包括动臂3、中臂4、斗杆5三个部分,在任何状态下的水平投影长度不得超过12300mm;
42.2、工作装置水平投影长度达到11300mm时控制器发出警报,通过外接蜂鸣器实现,投影长度越接近12300mm时警报声越急促;
43.3、当工作装置水平投影长度达到12300mm时,控制器锁死能造成工作装置映射长度增加的油缸运动方向的控制电磁阀,只允许油缸往投影长度减小的方向运动;垂直映射长度小于12300mm时对电磁阀解锁;
44.4、油缸全部处在最小行程时,设定为角度零点;
45.5、控制器刚通电限位程序开始执行时,首先判断动臂上抬角度是否超过50
°
,动臂角度<50
°
,锁死斗杆和中臂,只允许动臂动作;动臂≥50
°
不作限制;当动臂角度第一次达到50
°
后限位程序不再执行该过程;
46.6、在作业中当测得第二角度传感器、第三角度传感器的角度同时在0-5
°
范围内,第一角度传感器的角度<50
°
时锁死中臂、斗杆油缸,第一角度传感器的角度≥50
°
时不作限制;
47.7、当转台上安装的双轴倾角传感器测得角度≥
°
10时,蜂鸣器报警(报警声音要和工作装置限位报警有区别)。
48.上述作为限制的数据,可以根据实际的机型,通过设定显示仪表进行重新设置。
49.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1