用于表征伺服控制机构的频率响应诊断的制作方法
本公开案的实施方式关于用于表征伺服控制机构的频率响应诊断。
背景技术:
0、现有技术的描述
1、伺服控制机构通常用在制造行业中,如用在用以自动化制造的机器人工具中。在一些情形下,此制造为半导体器件的多步骤处理,其中机器人工具包括附接至机器人连杆的马达,所述机器人连杆在脱气(或清洁)、沉积及蚀刻工艺中逐步移动半导体基板。机器人连杆(例如)可为用于在工厂接口及传送腔室或类似物内的基板传送的机器人的臂及终端受动器。机器人连杆也可包括一或多个滑轮皮带,所述滑轮皮带促进在马达与臂或其他机器人连杆之间的扭矩传递。
2、这些伺服控制机构中存在缺陷(或错误),无论在马达中、在马达所驱动的机器人连杆中,还是在使得马达与机器人连杆之间产生驱动力的滑轮皮带中皆如此。按惯例,当出现实际缺陷或检测到(例如,经由错误)可疑缺陷时,经训练的工程师需要直接连接并使用在放大器上运行的软件,所述放大器充当马达的致动器。举例而言,此直接连接通常经由计算器件经由通用串行总线(universal serial bus;usb)(或其他直接)连接的有线连接来进行。工程师可经由计算器件运行机器人工具(或其他伺服控制机构)的诊断以诊断缺陷或错误的来源。经由此方法,一次仅可测试单个马达。另外,按惯例经由滑轮皮带的直接物理测量来验证滑轮皮带的张力,需要拆卸马达堆叠及机器人连杆。
3、由于需要直接连接并使用放大器软件及滑轮皮带的直接物理测量,因此整个机器人工具(或机器人工具的一部分)被运送至机器人工具制造商以进行诊断,因为通常禁止进入客户制造设施来进行测试。这会导致大量停机时间及自动化制造(诸如,半导体处理)的中断。此种停机时间的结果包括生产成本及/或在诊断并修复有缺陷设备时可能使用的重复性设备的成本。
技术实现思路
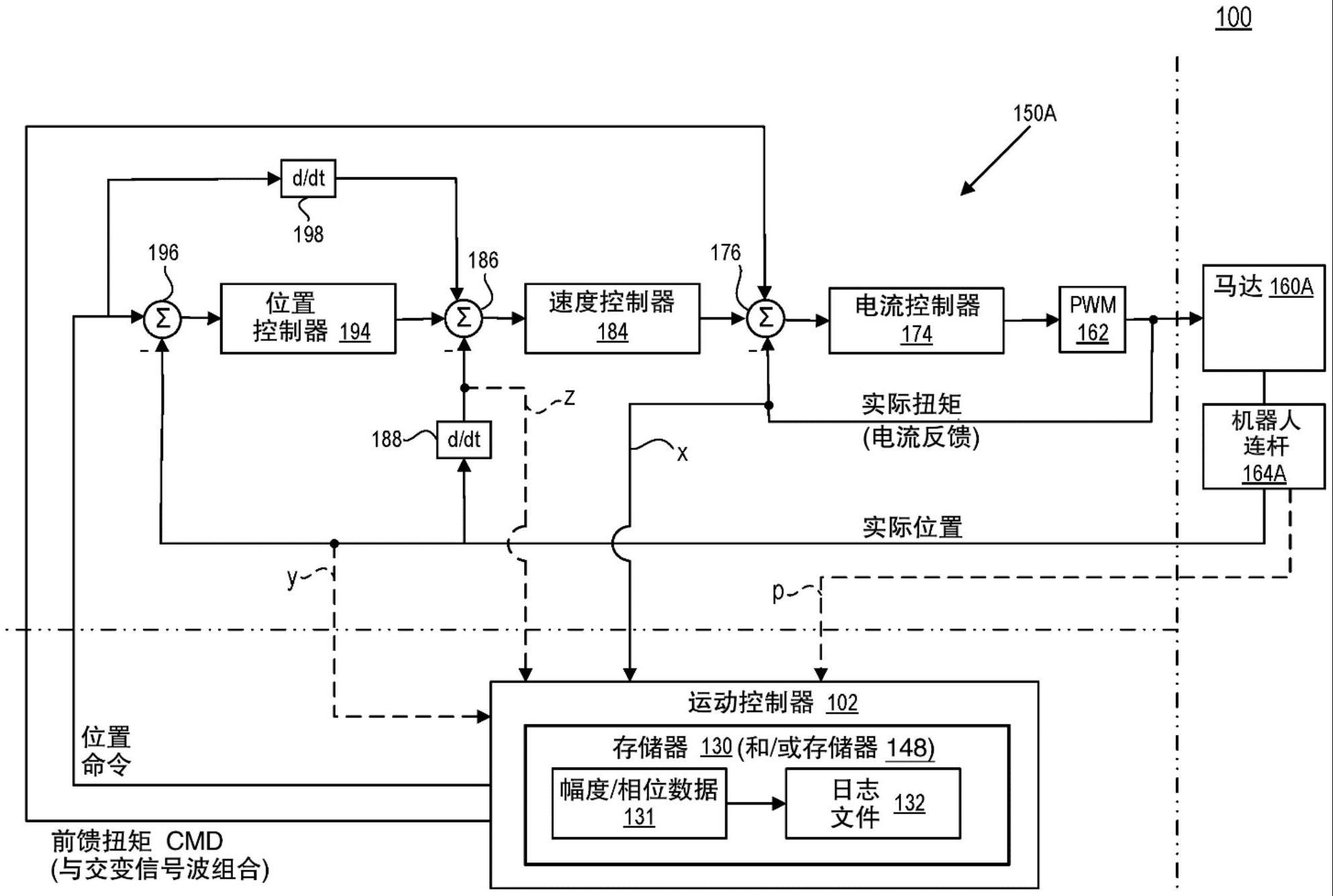
1、本文所述实施方式中的一些涵盖一种运动控制服务器,所述运动控制服务器包括存储器及耦接至存储器的处理器。所述处理器可经调适(例如,经由执行指令)以将扭矩命令供应至控制马达的放大器,其中所述马达驱动机器人连杆。所述处理器可进一步在所述扭矩命令中包括交变信号波,所述交变信号波用以测试马达及机器人连杆的频率响应。所述处理器可进一步根据采样率及在时间周期内以多个时间步长中的每一时间步长自放大器接收马达的瞬时扭矩值及机器人连杆的瞬时机械参数值。所述处理器可进一步在存储器中存储瞬时扭矩值的集合体及瞬时机械参数值的集合体。所述处理器可进一步针对交变信号波的第一频率,确定瞬时机械参数值的集合体与瞬时扭矩值的集合体之间的幅值及相位偏移。所述处理器可进一步使用针对交变信号波的多个频率的幅值及相位偏移数据的集合体产生波特图指纹,所述波特图指纹用于执行马达及机器人连杆的诊断。
2、在相关实施方式中,本文描述一种用于诊断伺服控制机构的方法。所述方法可包括通过运动控制器将扭矩命令供应至控制马达的三环放大器,其中所述马达驱动机器人连杆。所述方法可进一步包括通过运动控制器向所述扭矩命令添加(使所述扭矩命令包括)交变信号波,所述交变信号波用以测试马达及机器人连杆的频率响应。所述方法可进一步包括通过运动控制器根据采样率及在时间周期内以多个时间步长中的每一时间步长自三环放大器接收马达的瞬时扭矩值及机器人连杆的瞬时速度值。所述方法可进一步通过所述运动控制器在存储器中存储瞬时扭矩值的集合体及瞬时速度值的集合体。所述方法可进一步包括通过运动控制器针对交变信号波的第一频率,确定瞬时速度值的集合体与瞬时扭矩值的集合体之间的幅值及相位偏移。所述方法可进一步包括通过运动控制器针对交变信号波的多个频率的幅值及相位偏移数据的集合体产生波特图指纹,所述波特图指纹用于执行马达及机器人连杆的诊断。
3、在另一实施方式中,提供一种存储指令的非暂时性计算机可读存储媒体,当由运动控制器的处理器件执行时,所述指令使处理器件执行多个操作。所述多个操作可包括将扭矩命令供应至控制马达的放大器,其中所述马达驱动机器人连杆。所述多个操作可进一步包括向扭矩命令添加(使所述扭矩命令包括)交变信号波,所述交变信号波用以测试马达及机器人连杆的频率响应。所述多个操作可进一步根据采样率及在时间周期内以多个时间步长中的每一时间步长自放大器接收马达的瞬时扭矩值及机器人连杆的瞬时位置值。所述多个操作可进一步包括在存储器中存储瞬时扭矩值的集合体及瞬时位置值的集合体。所述多个操作可进一步包括基于在所述时间周期内的所述瞬时位置值计算机器人连杆的速度值的集合体。所述多个操作可进一步包括针对交变信号波的第一频率,确定速度值的集合体与瞬时扭矩值的集合体之间的幅值及相位偏移。所述多个操作可进一步包括通过运动控制器针对交变信号波的多个频率的幅值及相位偏移数据的集合体产生波特图指纹,所述波特图指纹用于执行马达及机器人连杆的诊断。
4、根据本公开案的这些及其他实施方式提供了诸多其他特征。本公开案的其他特征及实施方式将从以下详细描述、权利要求书及附图变得更加显而易见。
技术特征:
1.一种运动控制服务器,包括:
2.如权利要求1所述的运动控制服务器,其中所述存储器进一步存储指令,当由所述处理器执行时,所述指令使所述运动控制服务器作为主设备在通讯网络上与作为从设备的所述放大器通讯,其中所述通讯网络包括小于100微秒的数据更新时间及小于1微秒的通讯抖动。
3.如权利要求1所述的运动控制服务器,其中所述瞬时机械参数值包括所述机器人连杆的至少一个部件的力、应变、压缩、摩擦、共振、位置或速度中的一个。
4.如权利要求1所述的运动控制服务器,其中所述处理器将与所述交变信号波组合的所述扭矩命令供应至所述放大器的电流控制器,所述处理器进一步用以:
5.如权利要求1所述的运动控制服务器,其中所述指纹为波特图指纹,且其中所述处理器进一步用以:
6.如权利要求5所述的运动控制服务器,其中所述处理器进一步用以:
7.如权利要求5所述的运动控制服务器,其中所述处理器进一步用以:
8.如权利要求5所述的运动控制服务器,其中处理器进一步用以:
9.如权利要求1所述的运动控制服务器,其中所述指纹为波特图指纹,且其中所述处理器进一步用以:
10.一种方法,包括:
11.如权利要求10所述的方法,其中所述供应及所述包括包括:将所述扭矩命令及所述交变信号波供应至所述三环放大器的电流控制器,所述方法进一步包括:
12.如权利要求10所述的方法,其中所述指纹为波特图指纹,所述方法进一步包括:
13.如权利要求12所述的方法,其中所述确定包括:
14.如权利要求12所述的方法,其中所述确定包括:
15.如权利要求12所述的方法,其中所述确定的步骤包括以下步骤:
16.如权利要求10所述的方法,其中所述指纹为波特图指纹,所述方法进一步包括:
17.一种存储指令的非暂时性计算机可读存储媒体,当由运动控制器的处理器件执行时,所述指令使所述处理器件执行多个操作,包括:
18.如权利要求17所述的非暂时性计算机可读存储媒体,其中所述指纹为波特图指纹,且其中所述多个操作进一步包括:
19.如权利要求18所述的非暂时性计算机可读存储媒体,其中所述多个操作进一步包括:
20.如权利要求18所述的非暂时性计算机可读存储媒体,其中所述多个操作进一步包括:
技术总结
一种服务器包括处理器,所述处理器用以将扭矩命令供应至控制马达的放大器,所述马达驱动连杆;在所述扭矩命令中包括交变信号波,所述交变信号波用以测试马达及连杆的频率响应;根据采样率及在时间周期内以每一时间步长自放大器接收马达的瞬时扭矩值及连杆的瞬时机械参数值;存储此两种值的集合体;对于交变信号波的第一频率,确定瞬时机械参数值的集合体与瞬时扭矩值的集合体之间的幅值及相位偏移;及使用针对交变信号波的多个频率的幅值及相位偏移数据的集合体产生将用于执行马达及连杆的诊断的指纹。
技术研发人员:亚当·克里斯托弗·克莱默
受保护的技术使用者:应用材料公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!