无线紫外光协作蜂群无人机多目标跟踪方法
1.本发明属于无人机跟踪方法技术领域,涉及无线紫外光协作蜂群无人机多目标跟踪方法。
背景技术:
2.近几年来,无人作战系统在战争中的地位愈发突显。无人作战系统的研究已经逐渐从理论走向了战场,近几年来部分国家之间的战争冲突,证明了无人作战系统在战场上发挥的作用不可小视。而作为无人作战的高级形式——无人蜂群作战,必然会有更大的战争破坏力。现有的无人机跟踪方法跟踪准确性较低,无法保证追捕效率。
技术实现要素:
3.本发明的目的是提供一种无线紫外光协作蜂群无人机多目标跟踪方法,解决了现有技术中存在的跟踪准确性较低的问题。
4.本发明所采用的技术方案是,无线紫外光协作蜂群无人机多目标跟踪方法,包括以下步骤:
5.步骤1、通过每个追捕无人机搭载的紫外光收发装置获取相邻追捕无人机与本机的相对位置、速度;
6.步骤2、获取目标无人机当前位置,并对其轨迹进行预测;
7.步骤3、将追捕无人机分割成与目标无人机数量相同的联盟块;
8.步骤4、在目标无人机的预测轨迹满足追捕无人机成功追捕的约束条件下,对目标无人机进行围捕,在围捕过程中,追捕无人机根据相邻追捕无人机与本机的相对位置、速度实时调整速度。
9.本发明的特点还在于:
10.步骤2包括以下步骤:
11.步骤2.1、通过每个追捕无人机搭载的3d目标检测模块获取目标无人机的边界框,假设追捕无人机在t时刻检测出n个目标无人机每个目标无人机用(x,y,z,l,w,h,θ,s)表示,其中,(x,y,z)表示目标无人机在空间中的位置,(l,w,h)表示边界框的尺寸,s表示置信度;
12.步骤2.2、对目标无人机进行轨迹预测,第i个无人机的t时刻轨迹表示为:
[0013][0014]
其中,v
x
,vy,vz表示目标无人机在3个维度方向上的速度,
[0015]
x
est
=x+v
x
;
[0016]yest
=y+vy;
[0017]zest
=z+vz;
[0018]
步骤2.3、将每个目标无人机与轨迹进行匹配,得到每个目标无人机的对应
轨迹;
[0019]
步骤2.4、对匹配成功的目标无人机的轨迹进行更新,得到t时刻更新后的所有轨迹再根据bayes规则,得到更新后的每个目标无人机轨迹:
[0020]
t
tk
=(x',y',z',θ',l',w',h',s',v
x
',vy',vz'),k∈{1,2,...,w
t
}。
[0021]
步骤3包括以下步骤:
[0022]
步骤3.1、根据追捕无人机与目标无人机的构成偶图,将偶图中权重最小的边移除;
[0023]
步骤3.2、检查是否有节点没有任何连接,若无则回到步骤3.1,否则将本循环中移除的边连接的追捕者标记为联盟领导者;
[0024]
步骤3.3、重复步骤3.1-3.2,直到每个目标无人机分配到追捕无人机联盟块。
[0025]
步骤4中约束条件包括:
[0026]
条件一、目标无人机的预测轨迹t
tk
经过任意追捕无人机所在的阿波罗尼奥斯圆内;
[0027]
条件二、目标无人机的预测轨迹t
tk
落在追捕无人机联盟块构成的凸多边形内部,且目标无人机和追捕无人机构成的相邻追-逃阿波罗尼奥斯圆满足两两相交。
[0028]
紫外光收发装置为半球形mimo通信系统。
[0029]
本发明的有益效果是:本发明无线紫外光协作蜂群无人机多目标跟踪方法,每架无人机均搭载紫外光收发装置,利用无线紫外光led收发装置使得各无人机机间信息进行实时交互,提高了多无人机间通信的稳定性和可靠性,保证追捕过程的顺利进行;采用3d多目标跟踪方法对目标无人机集群进行跟踪,在满足可围捕条件后对目标无人机实施围捕,保证目标无人机轨迹的准确性,提高跟踪效率;将追捕无人机群分割成与目标无人机数量相同的联盟块,保证追捕效率。
附图说明
[0030]
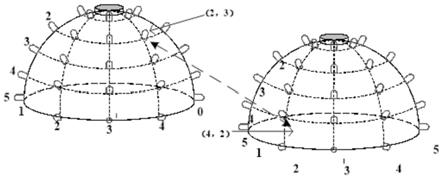
图1是本发明无线紫外光协作蜂群无人机多目标跟踪方法中紫外光收发装置的结构示意图;
[0031]
图2是本发明无线紫外光协作蜂群无人机多目标跟踪方法中追捕无人机与目标无人机构成的偶图;
[0032]
图3是本发明无线紫外光协作蜂群无人机多目标跟踪方法中多无人机追捕单无人机的示意图;
[0033]
图4是本发明无线紫外光协作蜂群无人机多目标跟踪方法中多无人机追捕单无人机的另一种示意图。
具体实施方式
[0034]
下面结合附图和具体实施方式对本发明进行详细说明。
[0035]
无线紫外光协作蜂群无人机多目标跟踪方法,包括以下步骤:
[0036]
步骤1、通过每个追捕无人机搭载的紫外光收发装置获取相邻追捕无人机与本机的相对位置、速度;
[0037]
如图1所示,紫外光收发装置为半球形mimo通信系统,在多无人机围捕敌机过程
中,利用机载半球形mimo结构的led阵列发出的不同波长的紫外光,通过信号的发送和接收无使得各无人机机间信息进行实时交互,保障了无人机间信息传递的有效性,提高了多无人机间通信的稳定性和可靠性。每个半球形led阵列表面都被划分为m个纬线方向和n个经线方向,在经纬交点处安装led,顶部全向接收。将图1中的两个半球型led阵列装置分别搭载在两架无人机上,每个紫外光装置上都有对应的信号发送端和信号接收端,无人机通过接收相邻无人机所发送的信号从而确定环航过程中与本机的相对位置、速度等。每个led都有自身的编码,由纬向编码和经向编码组成,该编码反映led发射光束相对于节点自身的方向;每个led可独立控制,均能独立发送信息,完成信息的收发任务。
[0038]
步骤2、采用3d多目标跟踪方法对目标无人机进行跟踪预测,获取目标无人机当前位置,并对其轨迹进行预测;
[0039]
步骤2.1、通过每个追捕无人机搭载的3d目标检测模块获取目标无人机的边界框,假设追捕无人机在t时刻检测出n个目标无人机每个目标无人机用(x,y,z,l,w,h,θ,s)表示,其中,(x,y,z)表示目标无人机在空间中的位置,(l,w,h)表示边界框的尺寸,s表示置信度;
[0040]
步骤2.2、使用定速的卡尔曼滤波器来对检测到的目标无人机进行轨迹预测,第i个无人机的t时刻轨迹表示为:
[0041][0042]
其中,v
x
,vy,vz表示目标无人机在3个维度方向上的速度,
[0043]
x
est
=x+v
x
;
[0044]yest
=y+vy;
[0045]zest
=z+vz;
[0046]
步骤2.3、使用匈牙利算法将每个目标无人机与轨迹计算3d iou(交并比),并进行匹配,得到每个目标无人机的对应轨迹;数据关联后可得到四个集合:
[0047][0048][0049][0050][0051]
其中,t
match
和d
match
分别表示正确匹配的轨迹和检测结果,t
umatch
和d
umatch
分别表示未匹配的轨迹和检测结果,t
match
和t
umatch
是t
est
的互补子集,d
match
和d
umatch
是d
t
的互补子集。
[0052]
步骤2.4、对匹配成功的目标无人机的轨迹进行更新,得到t时刻更新后的所有轨迹再根据bayes规则,得到更新后的每个目标无人机轨迹:
[0053]
t
tk
=(x',y',z',θ',l',w',h',s',v
x
',vy',vz'),k∈{1,2,...,w
t
},t
tk
是和的加权平均数。
[0054]
步骤3、将追捕无人机分割成与目标无人机数量相同的联盟块;假设存在k个目标无人机,n个追捕无人机,所以n个追捕无人机将被分成k个追捕联盟,n个追捕无人机对k个
目标无人机实现一对一追捕;
[0055]
步骤3.1、根据追捕无人机与目标无人机构成的偶图,如图2所示,将偶图中权重(偶图中边连接的追捕无人机对目标无人机的收益)最小的边移除;
[0056]
步骤3.2、检查偶图中是否有节点没有任何连接,若无则回到步骤3.1,否则将本循环中移除的边连接的追捕者标记为联盟领导者;
[0057]
步骤3.3、重复步骤3.1-3.2,直到每个目标无人机分配到追捕无人机联盟块。
[0058]
步骤4、在目标无人机的预测轨迹满足追捕无人机成功追捕的两个约束条件下,对目标无人机进行围捕,在围捕过程中,追捕无人机根据相邻追捕无人机与本机的相对位置、速度实时调整速度。
[0059]
如图3所示,e表示目标无人机e的位置,p1,p2…
,pn分别表示n个追捕无人机p1,p2,
…
pn的位置,圆o1,o2,
…
,on分别表示p1,p2,
…
pn与e构成的追捕阿波罗尼奥斯圆圆心。要实现目标无人机无成功逃脱路径,则必须实现圆o1,o2,
…
,on中相邻圆两两相切或相交。所以约束条件包括:
[0060]
条件一、目标无人机的预测轨迹t
tk
经过任意追捕无人机所在的阿波罗尼奥斯圆内;
[0061]
条件二、如图4所示,其中e表示目标无人机e的位置,p1、p2、p3、p4分别表示4个追捕无人机p1、p2、p3、p4的位置。目标无人机的预测轨迹t
tk
落在追捕无人机联盟块(4个追捕无人机)构成的凸多边形内部,且目标无人机和追捕无人机构成的相邻追-逃阿波罗尼奥斯圆满足两两相交或者相切。
[0062]
通过以上方式,本发明无线紫外光协作蜂群无人机多目标跟踪方法,每架无人机均搭载紫外光收发装置,利用无线紫外光led收发装置使得各无人机机间信息进行实时交互,提高了多无人机间通信的稳定性和可靠性,保证追捕过程的顺利进行;采用3d多目标跟踪方法对目标无人机集群进行跟踪,在满足可围捕条件后对目标无人机实施围捕,保证目标无人机轨迹的准确性,提高跟踪效率;将追捕无人机群分割成与目标无人机数量相同的联盟块,保证追捕效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1