具有一个稳定平衡点混沌系统分布式延迟反馈控制器的建立方法
1.本发明涉及控制技术领域,具体涉及一种具有一个稳定平衡点混 沌系统分布式延迟反馈控制器的建立方法。
背景技术:
2.混沌运动是非线性动力系统中的重要研究对象,混沌运动在自然 界和人类社会生活、生产中的广泛应用,让它在近几十年来已成为研 究热点,特别在一些前沿科技领域,工程技术上也有相当大的研究价 值和应用前景,而对具有隐藏吸引子的混沌系统的研究则是现在非线 性系统研究中一个新的热点。隐藏型混沌系统可以分为:混沌系统的 吸引子为面平衡点、没有平衡点、曲线平衡点、直线平衡点、仅有一 个稳定的平衡点,特别是隐藏混沌吸引子具有线性平衡点的情况, shilnikov定理判据不再适用,这也是隐藏型混沌吸引子难以发现的原 因;近年来已有大量的隐藏混沌吸引子的研究,但大多数研究没有考 虑时间的优化,忽略了时间有限性。
3.由于混沌控制系统满足局部lipschitz条件,连续时间控制系统 的全局稳定性不易获得,因此研究混沌隐藏吸引子的受控混沌具有重 要意义。
技术实现要素:
4.为了克服上述现有技术存在的缺陷,本发明的目的在于提供了一 种具有一个稳定平衡点混沌系统分布式延迟反馈控制器的建立方法, 通过在原始系统中加入了分布式延迟反馈控制项,使被控系统具有更 加丰富的动态特性;同时,分布式延迟反馈控制器实现了对分岔的控 制,在稳定平衡下,被控系统能够分岔周期解,系统成为一个可控系 统,不会表现出混沌动力学;分布式延迟反馈控制器广泛地应用于各 类工程系统以及实际网络中,可以使在待机状态下的一段时间处于非 动作状态,维持信号的同步,以达到降低功耗的效果;本发明在实现 同步目标的同时,可以快速达到同步。
5.为了达到上述目的,本发明采用的技术方案为:
6.一种具有一个稳定平衡点混沌系统分布式延迟反馈控制器的建 立方法,包括以下步骤:
7.步骤1、基于分布式延迟反馈建立一种具有一个稳定平衡点的混 沌系统;
8.步骤2、对步骤1所建立的具有一个稳定平衡点混沌系统进行动 力学及稳定性分析;
9.步骤3、对步骤1所述的具有一个稳定平衡点混沌系统设置延迟 反馈控制器。
10.所述步骤1的具体方法为:
11.基于分布式延迟反馈建立一种具有一个稳定平衡点混沌系统:
[0012][0013]
系统(1)中,a,b,c为实数且a≠0;
[0014]
所述步骤2的具体方法为:
[0015]
对步骤1所建立的系统(1)进行动力学及稳定性分析
[0016]
系统(1)描述了a,b,c参数的耗散性、平衡的稳定性、最大 lyapunov指数、庞加莱截面,结论如下:
[0017]
1)系统(1)在条件c>0下是耗散的;
[0018]
2)系统(1)当c>0,a>0和bc-a>0,具有一个稳定结点或稳定结 点焦点o(0,0,0),当c>0,a>0,有一鞍焦点;
[0019]
3)当参数a=3.4,b=1,c=4时,系统(1)是混沌的,lyapunov指数 为λ1=0.062,λ2=0,λ3=-4.059,lyapunov维数d
λ
=2.015。
[0020]
所述步骤3的具体方法为:
[0021]
对步骤1所述的系统(1)设置延迟反馈控制器
[0022]
首先,对步骤1所述的系统(1)加入了一个分布式延迟反馈项u(t), 设置一个分布式延迟反馈控制系统u(t)
[0023][0024]
根据routh-hurwitz可得系统(8)当
[0025][0026]
平衡点o是渐近稳定,根据hopf分岔理论,设λ=wi,带入得
[0027][0028]
利用中心流形定理分析系统(8)在γ=γ0时的hopf分岔方向和分 岔周期解的稳定性,让cm[-r,0]表示区间上的实三维向量值函数空间 [-r,0]所有的分量都有m个连续导数;当m=0时,上标被省略;系统(8) 可以写成一个泛函微分方程:
[0029][0030]
当u(t)=(x(t),y(t),z(t))
t
,μ∈r1,l
μ
是一个单参数连续线性算子族, l
μ
:c[-1,0]
→
r3,算子f(μ,u(s)):r
×
c[-1,0]
→
r3包含非线性项,且
[0031][0032][0033]
基于riesz表示定理,接下来定义
[0034][0035][0036]
对于有
[0037][0038]
所以方程组(8)可以写成一个操作方程
[0039][0040]
对于φ∈c1[0,1],定义
[0041][0042]
双线性内积为
[0043][0044]
显然,一个a
*
(0)和a(0)是伴随算子,即如果a(0)q(θ)=iω0q(θ),那 么存在一个非零向量q
*
(ν)使a
*
(0)q
*
(ν)=-i
ν0q*
(ν);设θ∈(-∞,0),则
[0045][0046]
因此可以得到
[0047]
[0048]
最后对获得分歧解的周期进行稳定性分析,计算出描述中心流形 c0的坐标;对于u(t)在μ=0处的(11)解,定义z(t)=《q
*
(0),u(t)》, 设定在流形c0上, 实际上, z和是c中c0在q
*
(0)和方向上的局部坐标,得到
[0049][0050]
让
[0051][0052]
若θ=0,有
[0053][0054]
让
[0055][0056][0057][0058]
则
[0059][0060]
同理,我们可以得到
[0061][0062][0063][0064]
其中其中根据分岔理论我们可以得到
[0065][0066]
最终可以得到
[0067]
1)μ=0为系统(8)的hopf分岔值;
[0068]
2)hopf分岔方向由的μ2符号决定,如果μ2>0,hopf分岔是超 临界的,如果μ2<0,hopf分岔是次临界的;
[0069]
3)分岔周期解的稳定性由β2决定,如果β2<0,周期解是稳定的, 如果β2>0,则是不稳定的;
[0070]
4)分岔周期解的周期由t2确定,如果t2>0,则周期增大,当t2<0 时,周期减小;
[0071]
5)系统(1)可由分布式延迟反馈控制。
[0072]
本发明与现有技术相比,其显著优点是:本发明由于分布式延迟 反馈项的加入,在实现同步目标的同时,可以快速达到同步;且由于 在原始系统中加入了分布式延迟反馈项,因此被控系统将带来更加丰 富的动态特性。分布式延迟反馈控制器实现了对分支的控制;由于混 沌平衡的存在性,当被控系统能够分岔周期解,则系统成为可控系统, 而不会表现出混沌动力学。同时,分布式延迟反馈项在系统中起着消 除余差的作用,这种意义上的分岔控制有助于控制混沌。最后,根据 设计的分布式延迟反馈控制器我们得到了亚临界hopf分岔及超临界 hopf分岔,通过计算机系统数值仿真验证了分布式延迟反馈控制策 略的正确性和有效性,保证了所提方法的有效性。本发明可广泛地应 用于各类工程系统以及
实际网络中,比如:无线通信、传感器网络、 复杂网络、电力系统、液压系统、混沌电路等,可以使在待机状态下 的一段时间处于非动作状态,能够维持信号的同步,以达到降低功耗 的效果。
附图说明
[0073]
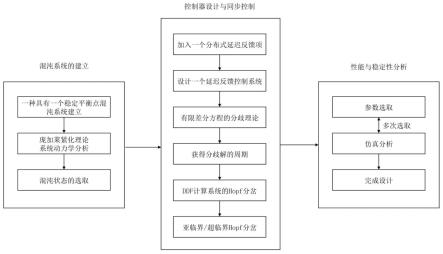
图1为本发明的程序框图。
[0074]
图2为本发明系统(1)的不同投影,其中图2(a)为系统(1)在x-y 平面投影,图2(b)为系统(1)在x-z平面投影,图2(c)为系统(1) 在y-z平面投影。
[0075]
图3为本发明系统(8)的局部稳定零解。
具体实施方式
[0076]
下面结合附图对本发明进一步详细说明。
[0077]
一种具有一个稳定平衡点混沌系统的分布式延迟反馈控制器的 建立方法,包括以下步骤:
[0078]
步骤1、基于分布式延迟反馈建立一种具有一个稳定平衡点混沌 系统:
[0079][0080]
系统(1)中,a,b,c为实数且a≠0;
[0081]
步骤2、对步骤1所建立的系统(1)进行动力学及稳定性分析
[0082]
系统(1)描述了a,b,c参数的耗散性、平衡的稳定性、最大 lyapunov指数、庞加莱截面,结论如下:
[0083]
1)系统(1)在条件c>0下是耗散的;
[0084]
2)系统(1)当c>0,a>0和bc-a>0,具有一个稳定结点或稳定结 点焦点o(0,0,0),当c>0,a>0,有一鞍焦点;
[0085]
3)当参数a=3.4,b=1,c=4时,系统(1)是混沌的,lyapunov指数 为λ1=0.062,λ2=0,λ3=-4.059,lyapunov维数d
λ
=2.015。
[0086]
图2为系统(1)在x-y平面、x-z平面、y-z平面上的不同投影。
[0087]
步骤3、设计一个延迟反馈控制系统
[0088]
对步骤1所述的系统(1)设置一个延迟反馈控制器
[0089]
首先,对步骤1所述的系统(1)加入了一个分布式延迟反馈项u(t), 设置一个分布式延迟反馈控制系统u(t)
[0090]
[0091]
根据routh-hurwitz可得系统(8)当
[0092][0093]
平衡点o是渐近稳定,根据hopf分岔理论,设λ=wi,带入得
[0094][0095]
利用中心流形定理分析系统(8)在γ=γ0时的hopf分岔方向和分 岔周期解的稳定性,让cm[-r,0]表示区间上的实三维向量值函数空间 [-r,0]所有的分量都有m个连续导数;当m=0时,上标将被省略;系 统(8)可以写成一个泛函微分方程:
[0096][0097]
当u(t)=(x(t),y(t),z(t))
t
,μ∈r1,l
μ
是一个单参数连续线性算子族, l
μ
:c[-1,0]
→
r3,算子f(μ,u(s)):r
×
c[-1,0]
→
r3包含非线性项,且
[0098][0099][0100]
基于riesz表示定理,接下来定义
[0101][0102][0103]
对于有
[0104][0105]
所以方程组(8)可以写成一个操作方程
[0106][0107]
对于φ∈c1[0,1],定义
[0108][0109]
双线性内积为
[0110][0111]
显然,一个a
*
(0)和a(0)是伴随算子,即如果a(0)q(θ)=iω0q(θ)那么 存在一个非零向量q
*
(ν)使a
*
(0)q
*
(ν)=-i
ν0q*
(ν);设θ∈(-∞,0),则
[0112][0113]
因此可以得到
[0114][0115]
最后对获得分歧解的周期进行稳定性分析,计算出描述中心流形 c0的坐标;对于u(t)在μ=0处的(11)解,定义z(t)=《q
*
(0),u(t)》, 设定在流形c0上, 实际上, z和是c中c0在q
*
(0)和方向上的局部坐标,得到
[0116][0117]
让
[0118][0119]
若θ=0,有
[0120][0121]
让
[0122][0123][0124][0125]
则
[0126][0127]
同理,我们可以得到
[0128][0129][0130][0131]
其中其中根据分岔理论我们可以得到
[0132][0133]
可以得到
[0134]
1)μ=0为系统(8)的hopf分岔值;
[0135]
2)hopf分岔方向由的μ2符号决定,如果μ2>0,hopf分岔是超 临界的,如果μ2<0,hopf分岔是次临界的;
[0136]
3)分岔周期解的稳定性由β2决定,如果β2<0,周期解是稳定的, 如果β2>0,则是不稳定的;
[0137]
4)分岔周期解的周期由t2确定,如果t2>0,则周期增大,当t2<0 时,周期减小;
[0138]
5)系统(1)可由分布式延迟反馈控制。
[0139]
对步骤3中延迟反馈控制系统(8)进行计算机数值仿真验证
[0140]
当γ=0,k=0且a=3.4,b=1,c=4时,系统处于混沌状态,p=4+4.67, q=1+21k-5.67k2,r=3.4-5.67k,其状态图如图2所示。
[0141]
考虑当k=1,延迟反馈控制系统为
[0142][0143]
可以计算出p=8.67,q=16.33,r=-2.267,h=z3+8.67z2+16.33z-2.267, 并且根据定理有假设 γ0=0.130,那么如果我们选择γ=2>γ0,零解是局部稳定的;如果我 们选择τ=0.005<γ0,零解是局部不稳定的;根据定理知道分岔点是超 临界的,分岔周期解是不稳定的。
[0144]
系统(8)的混沌图和局部稳定图如图3所示。
[0145]
以上具体实施方式仅用以说明本发明的技术方案,而非对其限制, 本领域的普通技术人员也应当理解,其依然可以对前述各实施例所记 载的技术方案进行修改,或者对其中部分技术特征进行等同替换,而 这些修改或者替换,并不使相应技术方案的本质脱离本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1