无人机飞行训练装置的制作方法
1.本发明涉及无人机领域。更具体地说,本发明涉及一种无人机飞行训练装置。
背景技术:
2.在无人机领域,现有的飞行模拟器大致分为游戏类(虚拟飞行操控类游戏)和培训类(是一种提供给航模爱好者培训的模拟器)两类。但现有的飞行类模拟器(如凤凰模拟器)主要是提供给航模爱好者体验驾驶飞行的模拟器,与民用无人机培训要求相差较大。
3.无人机不同于航模飞机,其集成有飞行控制系统,导航系统,任务系统等子模块,可通过地面站进行航线任务规划,从而实现自主驾驶飞行并自主完成各种飞行任务。现有的各类航模飞行模拟器可以通过遥控手柄对飞行器进行舵面控制,从而实现飞行驾驶功能,这仅相当于无人机飞行控制模式中的手动模式,此外无人机还具备姿态稳定,自主悬停,自主导航驾驶及应急返航等功能,在对无人机驾驶员进行技能培训过程中,这些功能在普通的航模飞行模拟器上是无法实现的。所以大多数无人机驾驶技术的专业技能训方面,只能使用真机进行教学培训,对于初学者来说上手难度较高,对于培训机构而言,直接采用真机进行培训也存在诸多安全风险,培训成本较高。
技术实现要素:
4.本发明的一个目的是提供一种无人机飞行训练装置,以解决上述问题。
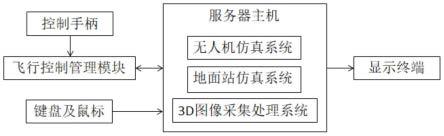
5.为了实现根据本发明的目的和其它优点,提供了一种无人机飞行训练装置,包括控制手柄、键盘及鼠标、飞行控制管理模块、服务器主机和显示终端;其中,所述服务器主机上搭载有无人机仿真系统、地面站仿真系统和3d图像采集处理系统,所述键盘及鼠标与所述地面站仿真系统连接,所述地面站仿真系统和所述控制手柄分别与所述飞行控制管理模块连接,所述飞行控制管理模块与所述无人机仿真系统连接,所述3d图像采集处理系统与所述显示终端连接。
6.优选的是,所述的无人机飞行训练装置,所述控制手柄上设有摇杆和/或开关按钮,所述摇杆和/或开关按钮与所述飞行控制管理模块通过无线信号连接。
7.优选的是,所述的无人机飞行训练装置,所述键盘及鼠标通过usb接口与所述服务器主机连接。
8.优选的是,所述的无人机飞行训练装置,所述地面站仿真系统通过usb虚拟串口与所述无人机飞行控制管理模块连接。
9.优选的是,所述的无人机飞行训练装置,所述飞行控制管理模块上集成有3轴角速率陀螺仪、3轴加速度计、气压高度传感器、gps卫星接收系统、pmu电源稳压模块和led状态指示灯。
10.优选的是,所述的无人机飞行训练装置,所述开关按钮包括手动飞行模式按钮、姿态飞行模式按钮和自主飞行模式按钮,所述飞行控制管理模块内置有手动飞行模式控制程序,姿态飞行模式控制程序和自主飞行模式控制程序,所述飞行控制管理模块根据接收到
的所述开关按钮的信号,激活对应的飞行模式控制程序。
11.优选的是,所述的无人机飞行训练装置,所述服务器主机采用英特尔i7 10代8核16线程处理器,具备32g运行内存和512g固态硬盘。
12.优选的是,所述的无人机飞行训练装置,所述3d图像采集处理系统至少具备8g的显示数据运行内存。
13.本发明至少包括以下有益效果:
14.本发明通过飞行控制管理模块,将控制手柄与无人机仿真系统和地面站仿真系统有机结合,在虚拟的3d场景中对真机的各种功能,以及地面站操控进行仿真模拟,从而实现无人机的各种关键控制技术的运用培训。相较于现有的飞行模拟器,该发明可以逼真还原无人机的各种飞行控制,包括手动驾驶、姿态稳定、自主飞行等,由于采用实物仿真进行模拟飞行训练,在对无人机驾驶员进行培训的过程中,可以有效降低飞行事故风险,在提高无人机驾驶员培训效率的同时也能为无人机驾驶员培训机构降低培训成本,促进无人机培训行业的健康持续发展。
15.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
16.图1是本发明一个实施例的无人机飞行训练装置的结构示意图。
具体实施方式
17.下面结合实施例和附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
18.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
19.如图1所示,本发明提供一种无人机飞行训练装置,包括控制手柄、键盘及鼠标、飞行控制管理模块、服务器主机和显示终端;其中,所述服务器主机上搭载有无人机仿真系统、地面站仿真系统和3d图像采集处理系统,所述键盘及鼠标与所述地面站仿真系统连接,所述地面站仿真系统和所述控制手柄分别与所述飞行控制管理模块连接,所述飞行控制管理模块与所述无人机仿真系统连接,所述3d图像采集处理系统与所述显示终端连接。具体的,所述控制手柄上设有摇杆和/或开关按钮,所述摇杆和/或开关按钮与所述飞行控制管理模块通过无线信号连接;所述键盘及鼠标通过usb接口与所述服务器主机连接;所述地面站仿真系统通过usb虚拟串口与所述无人机飞行控制管理模块连接。
20.上述实施方案中,通过控制手柄、键盘及鼠标和显示终端与服务器主机进行人机交互。控制手柄可以通过摇杆控制给出线性pwm信号,也可以通过开关按钮控制给出非线性pwm信号,通过2.4g高频无线传输将控制信号输入到无人机飞行控制管理模块,经过飞行控制管理模块对控制信号进行分析计算,给出对应的摇杆舵面控制指令,并将指令输入到无人机仿真系统进行计算,从而实现无人机俯仰角,滚转角,航向角,垂直速率的变化控制。键盘及鼠标主要用于地面站仿真系统的界面操作设置,地面站仿真系统与真实的无人机地面站具有相似的操作界面和操作功能,主要功能包括任务规划,航线规划,自动悬停,应急返
航控制等,地面站仿真系统根据键盘及鼠标的操作结果生成控制指令,并通过usb virtual com虚拟串口技术与无人机飞行控制管理模块进行指令通信,无人机飞行控制管理模块接收到控制指令后,对指令进行解算处理,将控制指令转变为无人机模型的三维空间姿态飞行控制数据信息并输入到无人机仿真系统进行计算,通过仿真系统的仿真程序输出无人机模型飞行运动仿真图像数据,3d图像采集处理系统对无人机仿真系统输出的无人机模型飞行运动仿真图像数据进行处理,并将无人机的模拟飞行训练图像通过显示终端显示出来,从而实现无人机的地面站仿真飞行控制。
21.本发明通过飞行控制管理模块,基于matlab/simulink图形化建模技术,将控制手柄与无人机仿真系统和地面站仿真系统有机结合,在虚拟的3d场景中对真机的各种功能,以及地面站操控进行仿真模拟,从而实现无人机的各种关键控制技术的运用培训,有效提高了无人机驾驶员的培训效率,降低了培训成本。
22.进一步的,为实现无人机的姿态控制及仿真飞行功能,所采用的无人机飞行控制管理模块包含真实的无人机硬件模块功能的集成,主要硬件模块包括3轴角速率陀螺仪,3轴加速度计,气压高度传感器,gps卫星接收系统,pmu电源稳压模块和led状态指示灯等。其中,3轴角速率陀螺仪,3轴加速度计,气压高度传感器,gps卫星接收系统,pmu电源稳压模块为真实的硬件系统,通过在飞行控制管理模块的飞控程序中加入模型代码,无人机飞行控制管理模块生成的虚假传感器数据及状态信息,经过无人机仿真系统的仿真程序对模型的运动控制参数进行融合计算,实现无人机各项功能的仿真模拟控制,包括俯仰角度,滚转角度,水平移动速度以及垂直移动速度的控制,从而实现无人机的俯仰运动,滚转运动,水平移动,垂直移动,自主定位悬停等空间三维运动控制。led状态指示灯提供飞行控制管理模块的链接及工作状态显示。
23.进一步的,所述开关按钮包括手动飞行模式按钮、姿态飞行模式按钮和自主飞行模式按钮,所述飞行控制管理模块内置有手动飞行模式控制程序,姿态飞行模式控制程序和自主飞行模式控制程序,所述飞行控制管理模块支持3中飞行模式的切换,根据接收到的所述开关按钮的信号,激活对应的飞行模式控制程序。具体的,飞行控制管理模块根据接收到的开关按钮的pwm信号激活对应的飞行模式控制程序,当控制手柄的开关按钮给出960uspwm控制信号时,可激活无人机的手动飞行模式,在该模式下飞行控制管理模块的飞控程序仅参与角速率控制,不参与角度以及水平位置控制。当控制手柄的开关按钮给出1500uspwm控制信号时,可激活无人机的姿态飞行模式,在该模式下飞行控制管理模块的飞控程序仅参与角速率及角度增稳控制,不参与位置控制。当控制手柄的开关按钮给出1920uspwm控制信号时,可激活无人机的自主飞行模式,在该模式下飞行控制管理模块的飞控程序参与角速率及角度增稳控制,以及水平位置控制,在无人工干预的情况下,自动控制无人机的三维空间位置,并保持相对位置不变,即自主悬停。
24.进一步的,为满足无人机仿真系统、地面站仿真系统和3d图像采集处理系统的正常工作,服务器主机需要具备高性能数据及图像处理能力,硬件平台采用英特尔i7 10代8核16线程处理器,搭载32g运行内存,采用512g固态硬盘用于数据存储。服务器主机集成xplane模拟飞行运行环境,以及无人机地面站仿真控制软件,3d图像采集处理系统至少具备8g的显示数据运行内存,确保仿真飞行图像画面的流畅运行。
25.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列
运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1