一种自动驾驶汽车控制系统与方法与流程
1.本发明涉及一种汽车控制系统与方法,具体涉及一种自动驾驶汽车控制系统与方法。
背景技术:
2.随着智能驾驶车辆自动化的提升,为提升智能驾驶安全性逐渐出现具有冗余功能的智驾控制架构及具有冗余执行器的车辆系统。
3.针对目前已有的冗余控制方法,现有技术如中国专利cn201911139913.0车辆传感器的信息同步给主控制器和冗余控制器对传感器通讯负载较大,主控的状态监测模块只检测控制器本身的故障情况,未考虑到执行器故障情况下的冗余控制方案等,在可靠性的原理上,具有实质性的缺陷,同时冗余部件过多,价格昂贵。
4.现有的汽车冗余控制系统,一般在控制系统与执行装置两个层面上进行冗余备份设置,但是设计的原则,都是一运行,一冗余备份,也就是二选一备份,在使用过程中,需要人参与决策,在一个装置坏掉的状况下,由人决定是否继续行驶还是等待救援,自动驾驶汽车,如果采用二选一备份模式,如果一个装置坏掉,在没有备份的状况,由自动驾驶装置来决策行驶方案,这样的风险特别的大,比如自动驾驶控制系统的自动驾驶控制模块,包括高性能cpu,还有复杂的软件系统,其软硬件故障率较高,如果采用二选一备份模式,在一个自动驾驶主控模块发生故障的情况下,备份自动驾驶控制模块就独立控制汽车行驶,如果在高速行驶状态,备份自动驾驶控制模块出现故障,那么发生恶劣交通事故的概率将非常的大,也就是现有的二选一备份模式不具备自动驾驶汽车的能力。
技术实现要素:
5.本发明是提高自动驾驶汽车控制系统的可靠性,自动驾驶控制系统自动驾驶控制单元采用三选一模式,每个自动驾驶控制单元可以选择控制执行层级的两个执行部件,控制执行部件的数量,控制了成本。
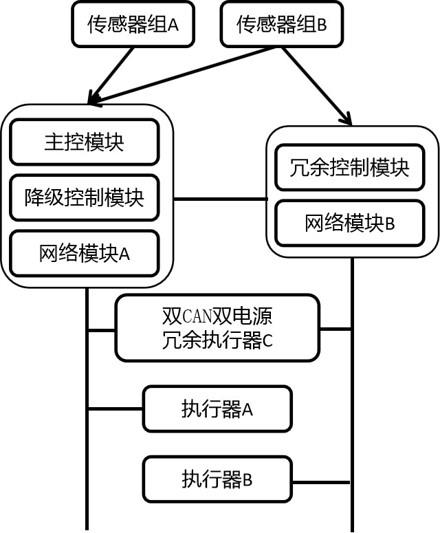
6.本技术解决上述技术问题的技术方案是:一种自动驾驶汽车控制系统,包括:自动驾驶控制单元a、自动驾驶控制单元b、网络a、网络b、执行器a、执行器b、传感器组a、传感器组b;自动驾驶控制单元a与自动驾驶控制单元b电信号连接;自动驾驶控制单元a包括自动驾驶主控模块、自动驾驶降级控制模块、网络模块a;自动驾驶控制单元b包括自动驾驶冗余控制模块、网络模块b;传感器组a与自动驾驶控制单元a电信号连接;网络模块a与网络a电信号连接,执行器a与网络a电信号连接;传感器组b与自动驾驶控制单元b电信号连接;网络模块b与网络b电信号连接,执行器b与网络b电信号连接;自动驾驶控制单元a通过自动驾驶控制单元b的电信号连接,可以控制执行器b;自动驾驶主控模块、自动驾驶降级控制模块可以控制执行器a控制汽车,或自动驾驶主控模块、自动驾驶降级控制模块通过自动驾驶控制单元b控制执行器b控制汽车;自动驾驶冗余控制模块可以控制执行器b控制汽车,或自动驾驶冗余控制模块通过自动驾驶控制单元a
控制执行器a控制汽车;自动驾驶主控模块与自动驾驶降级控制模块提供自动驾驶汽车所需的信息计算与控制处理;自动驾驶冗余控制模块提供自动驾驶汽车所需的信息计算与控制处理。
7.还可以是,传感器组b与自动驾驶控制单元a电信号连接;传感器组b的信号能够同时传递给自动驾驶控制单元a与自动驾驶控制单元b。
8.还可以是,网络a与网络b为两个独立的can网络;自动驾驶控制单元a还包括传感器控制模块a、冗余选择模块a,传感器控制模块a与传感器组a和传感器组b电信号连接,传感器控制模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接,冗余选择模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;自动驾驶控制单元b还包括传感器控制模块b、冗余选择模块b,传感器控制模块b与传感器组b电信号连接,传感器控制模块b与自动驾驶冗余控制模块电信号连接;冗余选择模块b与控制模块b电信号连接;冗余选择模块a与网络模块b电信号连接;冗余选择模块b与网络模块a电信号连接。
9.还可以是,自动驾驶控制单元a与自动驾驶控制单元b之间的电信号为串口信号。
10.还可以是,自动驾驶控制单元a与自动驾驶控制单元b之间的电信号为can网络接口信号。
11.还可以是,还包括执行器c,执行器c包括网络a接口、网络b接口。
12.还可以是,执行器c为双can双电源冗余转向模块;执行器a为智能制动模块;执行器b为冗余制动模块。
13.还可以是,传感器组a包括激光雷达、周视摄像头和/或环视摄像头;传感器组b包括毫米波雷达和/或超声波雷达。
14.一种自动驾驶汽车,包括上述任意一项的汽车自动驾驶控制系统。
15.一种自动驾驶汽车控制方法,汽车包括自动驾驶控制单元a、自动驾驶控制单元b、传感器组a和传感器组b,包括:自动驾驶控制单元a与传感器组a和传感器组b电信号连接,自动驾驶控制单元b与传感器组b电信号连接;自动驾驶控制单元a检测到传感器组a失效,自动驾驶控制单元a获取传感器组b的信号控制汽车。
16.还可以是,自动驾驶控制单元a包括自动驾驶主控模块、自动驾驶降级控制模块、传感器控制a;传感器控制a与传感器组a和传感器组b电信号连接;传感器控制a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;自动驾驶主控模块与自动驾驶降级控制模块电信号连接;自动驾驶主控模块与自动驾驶降级控制模块相互监测工作状态,自动驾驶降级控制模块监测到自动驾驶主控模块异常或故障,自动驾驶降级控制模块替代自动驾驶主控模块控制汽车。
17.还可以是,自动驾驶控制单元a包括冗余选择模块a、网络模块a、执行器a,自动驾驶控制单元b包括冗余选择模块b、自动驾驶冗余控制模块、网络模块b、执行器b;冗余选择模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;冗余选择模块a与网络模块b电信号连接;网络模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;执行器a与网络模块a电信号连接;冗余选择模块b与自动驾驶冗余控制模块电信号连接;冗余选择模块b与网络模块a电信号连接;执行器b与网络模块b电信号连接;自动驾驶主控模块或自动驾驶降级控制模块监测到网络模块a故障,或自动驾驶主控模块或自动驾驶降级控制模块监测到执行器a故障,自动驾驶主控模块或自动驾驶降级控制模块通过冗余选择模
块a通过网络模块b控制执行器b控制汽车。
18.还可以是,自动驾驶冗余控制模块监测自动驾驶主控模块或自动驾驶降级控制模块故障,自动驾驶冗余控制模块通过网络模块b控制执行器b控制汽车。
19.还可以是,还包括执行器c,执行器c包括网络a接口、网络b接口,执行器c通过网络a接口连接网络模块a,执行器c通过网络b接口连接网络模块b;自动驾驶主控模块或自动驾驶降级控制模块监测到执行器a故障,自动驾驶主控模块或自动驾驶降级控制模块通过执行器c控制汽车,同时通过冗余选择模块a通过网络模块b获得执行器b控制权,保证两套执行器在线待命。
20.本技术中技术方案的有益效果是:3个基本环节任意一个环节故障了,备用系统能够替代故障的环节,成本低,结构简单,在备份系统启动后,还有一个冗余系统在热备份,大幅度提升了故障状态的行驶可靠性;其中传感器组b同时连接自动驾驶控制单元a与自动驾驶控制单元b,传感器组b在传感器组a失效后,能够降级使用;两套独立的can网络,可以相互备份,在做主备切换控制的时候,自动驾驶控制单元a与自动驾驶控制单元b要相互监督对方模块的状态,同时要交换控制数据,便于切换后,控制流程的流畅性;自动驾驶控制单元a与自动驾驶控制单元b之间可以用各种协议形式的通讯接口;即使控制单元内部的控制核心cpu失效,控制单元还能够相互访问对方的网络,接管对方直接连接的执行器;执行器c为双can网络,双电源系统的冗余转向模块,执行器c,同时可以接受自动驾驶控制单元a或自动驾驶控制单元b的控制,执行器c可以是较高价值的高性能控制器,通过双接入网络,可以降低执行器的成本。
附图说明
21.图1:一种自动驾驶汽车控制系统实施例框图;图2:一种自动驾驶汽车控制系统实施例框图;图3:一种自动驾驶汽车控制系统实施例框图;图4:一种自动驾驶控制单元a与自动驾驶控制单元b通过网络连接示意图;图5:一种自动驾驶汽车控制系统正常工作模式示意图;图6:一种自动驾驶汽车控制系统切换降级模块控制示意图;图7:一种自动驾驶汽车控制系统切换网络b示意图;图8:一种自动驾驶汽车控制系统切换冗余控制示意图;图9:一种自动驾驶汽车控制系统同时冗余控制示意图。
具体实施方式
22.以下本发明较佳实施例的说明是本发明实施时的较佳方式,并不对本发明构成任何限制。本发明较佳实施例的说明只是作为本发明一般原理的说明。
23.如图1,一种自动驾驶汽车控制系统,用于自动驾驶控制单元a110、自动驾驶控制单元b120、网络a111、网络b121、执行器a、执行器b、传感器组a、传感器组b;自动驾驶控制单元a与自动驾驶控制单元b电信号连接;自动驾驶控制单元a包括自动驾驶主控模块、自动驾驶降级控制模块、网络模块a;自动驾驶控制单元b包括自动驾驶冗余控制模块、网络模块b;传感器组a与自动驾驶控制单元a电信号连接;网络模块a与网络a电信号连接,执行器a与网
络a电信号连接;传感器组b与自动驾驶控制单元b电信号连接;网络模块b与网络b电信号连接,执行器b与网络b电信号连接;自动驾驶控制单元a通过自动驾驶控制单元b的电信号连接,可以控制执行器b;自动驾驶主控模块、自动驾驶降级控制模块可以控制执行器a控制汽车,或自动驾驶主控模块、自动驾驶降级控制模块通过自动驾驶控制单元b控制执行器b控制汽车;自动驾驶冗余控制模块可以控制执行器b控制汽车,或自动驾驶冗余控制模块通过自动驾驶控制单元a控制执行器a控制汽车;自动驾驶主控模块与自动驾驶降级控制模块提供自动驾驶汽车所需的信息计算与控制处理;自动驾驶冗余控制模块提供自动驾驶汽车所需的信息计算与控制处理。
24.汽车在运行过程中,各个部件都有出现故障的概率,特别是制动机构、转向机构,各个部件希望有备份机构可以使用,比如刹车系统,轿车一般具备前轮左右刹车系统,后轮左右刹车系统,能够做到前后轮备份,左右备份。自动驾驶主控模块与自动驾驶降级控制模块还有自动驾驶冗余控制模块都是高新能的cpu,不断的运行复杂的自动驾驶程序,这些程序因为软件规模巨大,会有一定的软件故障率,如果驾驶过程中一旦发生故障,必须要有备份系统替代工作,如果一个模块发生了硬件故障,不能够恢复,另外两个模块还可以工作在一个运行,一个备份的模式,同时为了避免相同模块发生相同硬件故障的模式,各个模块可以采用不同的硬件架构与不同的软件版本,能够避免各个模块同时发生相同的硬件故障的情况。
25.当科技发展到自动驾驶阶段,汽车内部的控制系统开始复杂化,控制闭环一般包括传感器、控制模块、执行器、连接网络,这4个关键的环节,都有可能发生故障。
26.冗余机构设计的时候,需要考虑4个基本环节任意一个环节故障了,备用系统能够替代故障的环节,同时要控制成本,不能将冗余机构设计的太臃肿,太复杂。
27.自动驾驶控制单元a与自动驾驶控制单元b直接有信号连接,不但能够传递监测信号,也能够相互使用对方控制单元连接的传感器、执行器和网络,实现了分段备份,也就是两套控制系统可以整套系统备份,也可以4个基本环节之间备份和冗余。
28.如图2,传感器组b与自动驾驶控制单元a电信号连接;传感器组b的信号能够同时传递给自动驾驶控制单元a与自动驾驶控制单元b。
29.如图2,通过设置两组传感器,其中传感器组b同时连接自动驾驶控制单元a与自动驾驶控制单元b,传感器组b在传感器组a失效后,能够降级使用。设置传感器组b同时连接自动驾驶控制单元a与自动驾驶控制单元b,放置网络连接出现故障,自动驾驶控制单元a不能获取自动驾驶控制单元b的信息,却可以直接获得传感器组b的信息。
30.如图4,网络a与网络b为两个独立的can网络;自动驾驶控制单元a还包括传感器控制模块a、冗余选择模块a,传感器控制模块a与传感器组a和传感器组b电信号连接,传感器控制模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接,冗余选择模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;自动驾驶控制单元b还包括传感器控制模块b、冗余选择模块b,传感器控制模块b与传感器组b电信号连接,传感器控制模块b与自动驾驶冗余控制模块电信号连接;冗余选择模块b与控制模块b电信号连接;冗余选择模块a与网络模块b电信号连接;冗余选择模块b与网络模块a电信号连接。
31.如图3,图4,一般汽车内部总线为can网络协议,设置两套独立的can网络,可以相互备份,在做主备切换控制的时候,自动驾驶控制单元a与自动驾驶控制单元b要相互监督
对方模块的状态,同时要交换控制数据,便于切换后,控制流程的流畅性。自动驾驶控制单元a与自动驾驶控制单元b之间可以用各种协议形式的通讯接口。
32.一些实施方式中,自动驾驶控制单元a与自动驾驶控制单元b之间的电信号为串口信号。
33.如图3,为了快速交换控制数据,自动驾驶控制单元a与自动驾驶控制单元b之间可以通过串口直接连通,自动驾驶控制单元a与自动驾驶控制单元b之间可以快速交流控制数据,串口可以直接连接控制单元内部的cpu,交流快捷简单。
34.一些实施方式中,自动驾驶控制单元a与自动驾驶控制单元b之间的电信号为can网络接口信号。
35.如图4,自动驾驶控制单元a与自动驾驶控制单元b之间可以通过can接口连通,can网络,一般有专用的网络接口芯片,自动驾驶控制单元a与自动驾驶控制单元b相互连接到对方的can网络控制模块,即使控制单元内部的控制核心cpu失效,控制单元还能够相互访问对方的网络,接管对方直接连接的执行器。
36.一些实施方式中,还包括执行器c,执行器c包括网络a接口、网络b接口。
37.如图4,执行器c为双can网络,双电源系统的冗余转向模块,执行器c,同时可以接受自动驾驶控制单元a或自动驾驶控制单元b的控制,执行器c可以是较高价值的高性能控制器,通过双接入网络,可以降低执行器的成本,不用安装两个高性能的执行器作为备份,同时降低了设备复杂度。
38.一些实施方式中,执行器c为双can双电源冗余转向模块;执行器a为智能制动模块;执行器b为冗余制动模块。
39.如图4,执行器a,执行器b分别独立挂载在自动驾驶控制单元a或自动驾驶控制单元b,执行器a,执行器b的价值相对较低,在自动驾驶控制单元a与自动驾驶控制单元b之间的电信号故障,各个控制单元有各自的控制器可以操控。
40.一些实施方式中,传感器组a包括激光雷达、周视摄像头和/或环视摄像头;传感器组b包括毫米波雷达和/或超声波雷达。
41.如图3,图4,传感器一般价格昂贵,如果两套系统都做顶级配置,价格高昂,采用两组系统配制不同的传感器,可以同时工作使用,在故障模式下,只要有一套传感器还正常,汽车可以做降级使用,比如自动驾驶的汽车,在一组传感器故障后,可以降低车速,紧急停车,或者要求人工干预,降级使用。
42.一种自动驾驶汽车,包括上述的自动驾驶汽车控制系统。
43.一种自动驾驶汽车控制方法,汽车包括自动驾驶控制单元a、自动驾驶控制单元b、传感器组a和传感器组b,包括:自动驾驶控制单元a与传感器组a和传感器组b电信号连接,自动驾驶控制单元b与传感器组b电信号连接;自动驾驶控制单元a检测到传感器组a失效,自动驾驶控制单元a获取传感器组b的信号控制汽车。
44.如图2,通过设置两组传感器,其中传感器组b同时连接自动驾驶控制单元a与自动驾驶控制单元b,传感器组b在传感器组a失效后,能够降级使用。设置传感器组b同时连接自动驾驶控制单元a与自动驾驶控制单元b,放置网络连接出现故障,自动驾驶控制单元a不能获取自动驾驶控制单元b的信息,却可以直接获得传感器组b的信息。
45.自动驾驶控制单元a有较高的计算性能,通过分析汽车的运动传感器,可以判定汽
车在运动,然后分析传感器的图像,如果图像无变化,可以判断各种故障模式,比如摄像头被覆盖等等极端性故障。
46.自动驾驶控制单元a连接两组传感器,能够有效地避免一组传感器因为车辆碰撞等模式情况下全组失效的状况。
47.一些实施方式中,自动驾驶控制单元a包括自动驾驶主控模块、自动驾驶降级控制模块、传感器控制a;传感器控制a与传感器组a和传感器组b电信号连接;传感器控制a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;自动驾驶主控模块与自动驾驶降级控制模块电信号连接;自动驾驶主控模块与自动驾驶降级控制模块相互监测工作状态,自动驾驶降级控制模块监测到自动驾驶主控模块异常或故障,自动驾驶降级控制模块替代自动驾驶主控模块控制汽车。
48.如图5,如图6,当前,智能设备内部电路复杂,软件也非常的复杂,一个智能部件发生硬件故障、软件故障的概率都比较高。通过设置自动驾驶主控模块与自动驾驶降级控制模块两套模块,可以有效避免智能部件同时失效的状况出现,在一个自动驾驶控制单元a内部,自动驾驶主控模块、自动驾驶降级控制模块就在一个机柜中,相互之间可以通过串口,甚至i/o端口,相互连接,两个模块运行过程中,相互报告运行状态,可以相互监控对方的工作状态与备份对方的控制数据,可以做到在故障模式下,无缝切换控制过程。考虑到cpu系统的昂贵性,自动驾驶降级控制模块可以采用低级别的cpu,做基本的控制操作,也就是自动驾驶降级控制模块与自动驾驶主控模块在硬件与软件都是不同的系统,能够避免同时发生相同硬件故障与相同软件故障的概率。
49.一些实施方式中,自动驾驶控制单元a包括冗余选择模块a、网络模块a、执行器a,自动驾驶控制单元b包括冗余选择模块b、自动驾驶冗余控制模块、网络模块b、执行器b;冗余选择模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;冗余选择模块a与网络模块b电信号连接;网络模块a与自动驾驶主控模块和自动驾驶降级控制模块电信号连接;执行器a与网络模块a电信号连接;冗余选择模块b与自动驾驶冗余控制模块电信号连接;冗余选择模块b与网络模块a电信号连接;执行器b与网络模块b电信号连接;自动驾驶主控模块或自动驾驶降级控制模块监测到网络模块a故障,或自动驾驶主控模块或自动驾驶降级控制模块监测到执行器a故障,自动驾驶主控模块或自动驾驶降级控制模块通过冗余选择模块a通过网络模块b控制执行器b控制汽车。
50.如图7,当网络a出现故障,自动驾驶主控模块或自动驾驶降级控制模块通过网络模块a联系不到执行器,自动驾驶主控模块或自动驾驶降级控制模块可以通过冗余选择模块a连接到网络模块b,可以控制执行器b或执行器c,自动驾驶主控模块的cpu配置最高,这样只是切换了控制器,对自动驾驶汽车的控制行为影响较小。
51.一些实施方式中,自动驾驶冗余控制模块监测自动驾驶主控模块或自动驾驶降级控制模块故障,自动驾驶冗余控制模块通过网络模块b控制执行器b控制汽车。
52.如图8,当自动驾驶控制单元a出现故障,自动驾驶主控模块或自动驾驶降级控制模块都失去功能,自动驾驶冗余控制模块可以通过冗余选择监控自动驾驶控制单元a的运行状态,当监测到自动驾驶控制单元a不工作了,自动驾驶冗余控制模块通过网络模块b控制执行器b控制汽车,或者控制执行器c控制汽车。
53.一些实施方式中,还包括执行器c,执行器c包括网络a接口、网络b接口,执行器c通
过网络a接口连接网络模块a,执行器c通过网络b接口连接网络模块b;自动驾驶主控模块或自动驾驶降级控制模块监测到执行器a故障,自动驾驶主控模块或自动驾驶降级控制模块通过执行器c控制汽车,同时通过冗余选择模块a通过网络模块b获得执行器b控制权,保证两套执行器在线待命。
54.如图9,当执行器a智能制动模块故障时,自动驾驶主控模块或自动驾驶降级控制模块可以通过两个网络,分别控制执行器c与执行器b控制汽车,确保两套执行器同时在线工作,保证汽车行驶安全。
55.当然还有很多种故障模式,比如自动驾驶主控模块或自动驾驶降级控制模块故障,网络b故障,这种模式自动驾驶冗余控制模块可以通过冗余选择b连接网络模块a,控制执行器a或执行器c。
56.本发明虽然根据优选实施例和若干备选方案进行说明和描述,但发明不会被在本说明书中的特定描述所限制。其它另外的替代或等同组件也可以用于实践本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1