确定机器人拥堵点位置的方法、装置、机器人及存储介质与流程
本发明涉及机器人路径规划领域,特别是涉及一种确定机器人拥堵点位置的方法、装置、机器人及存储介质。
背景技术:
1、目前,随着机器人行业的快速发展,机器人的路径规划问题越来越值得重视,现有技术中,机器人获取了目标区域的障碍物图后,会基于障碍物图进行路径规划。但机器人在按照规划好的路径实际行进过程中,由于机器人自身宽度等原因的限制,导致机器人在路径途中会出现被卡住的现象。可见,现有技术的机器人只能规划出机器人的行进路径,并不能知道机器人可能会在哪个位置被卡住。
技术实现思路
1、本发明的目的是提供一种确定机器人拥堵点位置的方法、装置、机器人及存储介质,不仅可以规划出机器人的行进路线,也能知道机器人具体是被卡在哪里不能通行。
2、为解决上述技术问题,本发明提供了一种确定机器人拥堵点位置的方法,包括:
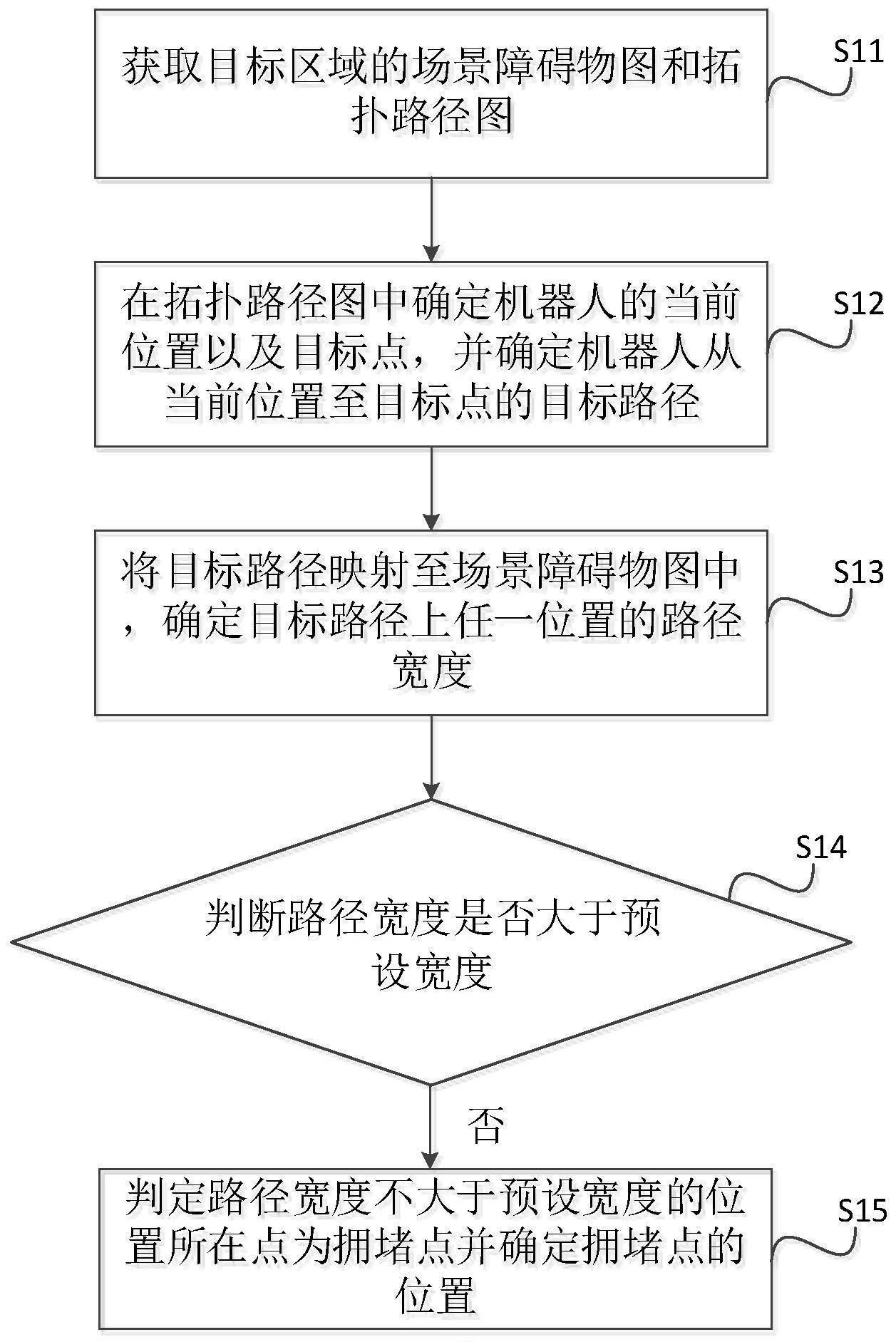
3、获取目标区域的场景障碍物图和拓扑路径图;
4、在所述拓扑路径图中确定机器人的当前位置以及目标点,并确定所述机器人从所述当前位置至所述目标点的目标路径;
5、将所述目标路径映射至所述场景障碍物图中,确定所述目标路径上任一位置的路径宽度;
6、判断所述路径宽度是否大于预设宽度,若否,则判定路径宽度不大于所述预设宽度的位置所在点为拥堵点并确定所述拥堵点的位置。
7、在一实施例中,所述确定所述目标路径上任一位置的路径宽度,包括:
8、确定位置,记录沿所述位置的路径切线的垂直方向上经过所述位置的不接触障碍物的最长直线距离,所述最长直线距离即为所述路径宽度。
9、在一实施例中,获取目标区域的场景障碍物图,包括:
10、通过距离传感器获取目标区域的点云信息;
11、将所述点云信息投影至机器人坐标系上以得到投影图像;
12、将所述投影图像按照比例尺进行像素化,得到所述目标区域的场景障碍物图。
13、在一实施例中,所述确定所述拥堵点的位置,包括:
14、将所述拥堵点的位置转换至世界坐标系中,确定所述拥堵点的坐标。
15、在一实施例中,还包括:
16、若所述路径宽度大于预设宽度,则判定所述目标路径上不存在拥堵点;
17、根据所述目标路径上不存在拥堵点的结果,将所述目标路径所在的区域标记为可通行区域。
18、在一实施例中,在判定所述路径宽度不大于所述预设宽度之后,还包括:
19、通过预设算法对所述机器人的当前位置到所述目标点之间的路径进行路径搜索,若能搜索到从所述机器人的当前位置至所述目标点的通行路径,则判定所述机器人可以到达所述目标点,否则,则判定所述机器人无法到达所述目标点。
20、在一实施例中,在所述获取目标区域的场景障碍物图和拓扑路径图之后,还包括:
21、确定所述机器人的朝向,在机器人坐标系中根据机器人的当前位置以及所述机器人的朝向确定兴趣矩形区域并确定所述兴趣矩形区域的四个顶点的坐标,所述机器人的当前位置位于所述兴趣矩形区域的中心位置;
22、将所述兴趣矩形区域映射至所述场景障碍地图和拓扑路径图中,得到拓扑路径图中的兴趣矩形区域和所述场景障碍物图中的兴趣矩形区域;
23、所述在所述拓扑路径图中确定所述机器人的当前位置以及目标点,包括:
24、在所述拓扑路径图中的兴趣矩形区域中确定所述机器人的当前位置,在所述兴趣区域中选取距离所述机器人的当前位置最远的一个坐标点作为所述目标点;
25、所述将所述目标路径映射至所述场景障碍物图中,包括:
26、将所述目标路径映射至所述场景障碍物图中的兴趣矩形区域。
27、为解决上述技术问题,本发明还提供了一种确定机器人的拥堵点位置的装置,包括:
28、获取模块,用于获取目标区域的场景障碍物图和拓扑路径图;
29、目标路径确定模块,用于在所述拓扑路径图中确定所述机器人的当前位置以及目标点,并确定所述机器人从所述当前位置至所述目标点的目标路径;
30、路径宽度确定模块,用于将所述目标路径映射至所述场景障碍物图中,确定所述目标路径上任一位置的路径宽度;
31、判断模块,用于判断所述路径宽度是否大于预设宽度,若否,则判定路径宽度不大于所述预设宽度的位置所在点为拥堵点并触发拥堵点位置获取模块;
32、所述拥堵点位置获取模块,用于确定所述拥堵点的位置
33、为解决上述技术问题,本发明还提供了一种机器人,包括:
34、存储器,用于存储计算机程序;
35、处理器,用于执行所述计算机程序以实现如上述所述的确定机器人拥堵点位置的方法的步骤。
36、为解决上述技术问题,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的方法。
37、本发明提供了一种确定机器人拥堵点位置的方法、装置、机器人及存储介质,先获取目标区域的场景障碍物图和拓扑路径图,在拓扑路径图中确定机器人的当前位置以及目标点,并确定机器人的当前位置至目标点的目标路径,将目标路径映射到场景障碍物图后,确定目标路径上任一位置的路径宽度,并判断路径宽度是否大于预设宽度,若否,则判定该位置所在点为拥堵点并获取该拥堵点的位置信息。可见本申请在确定出机器人的目标路径后,还可以确定机器人会被卡在哪里不能通行,提高了机器人的通行可靠性。
技术特征:
1.一种确定机器人拥堵点位置的方法,其特征在于,包括:
2.如权利要求1所述的确定机器人拥堵点位置的方法,其特征在于,所述确定所述目标路径上任一位置的路径宽度,包括:
3.如权利要求1所述的确定机器人拥堵点位置的方法,其特征在于,所述获取目标区域的场景障碍物图,包括:
4.如权利要求1所述的确定机器人拥堵点位置的方法,其特征在于,所述确定所述拥堵点的位置,包括:
5.如权利要求1所述的确定机器人拥堵点位置的方法,其特征在于,所述方法还包括:
6.如权利要求1所述的确定机器人拥堵点位置的方法,其特征在于,在判定所述路径宽度不大于所述预设宽度之后,所述方法还包括:
7.如权利要求1至6任一项所述的确定机器人拥堵点位置的方法,其特征在于,在所述获取目标区域的场景障碍物图和拓扑路径图之后,所述方法还包括:
8.一种确定机器人拥堵点位置的装置,其特征在于,包括:
9.一种机器人,其特征在于,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的方法。
技术总结
本发明涉及机器人路径规划领域,公开了一种确定机器人拥堵点位置的方法、装置、机器人及存储介质,获取目标区域的场景障碍物图和拓扑路径图,在拓扑路径图中确定机器人的当前位置以及目标点,并确定机器人的当前位置至目标点的目标路径,将目标路径映射到场景障碍物图后,确定目标路径上任一像素点所在位置的路径宽度,并判断路径宽度是否大于预设宽度,若否,则判定该像素点为拥堵点并获取该拥堵点的位置信息。可见,本申请在确定出机器人的目标路径后,还可以确定机器人会被卡在哪里不能通行,提高了机器人的通行可靠性。
技术研发人员:刘勇,吴翔,陈俊伟
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!