一种基于无人机航拍的特色农产品生产全过程数据管理方法
1.本发明涉及一种基于无人机航拍的特色农产品生产全过程数据管理方法,属于农作物生产智能监控技术领域。
背景技术:
2.近年来,农业物联网、无线网络传输等技术的蓬勃发展,极大地推动了农业现代化进程,农业跨步迈入大数据时代。现代农业通过技术手段获取、收集、分析数据,有效地解决农业生产和市场销售等问题。互联网技术驱动农业生产、销售向智慧型转变,对于我国现代农业的转型升级具有重要意义。
3.国家高度重视农业大数据的应用。随着信息化和农业现代化深入推进,农业农村大数据正在与农业产业全面深度融合,日益成为智慧农业的神经系统和推进农业现代化的核心关键。在“互联网+”的大背景下,通过移动互联网、大数据、云计算、物联网等新一代信息技术与农产品管理跨界融合,创新基于互联网平台的现代农业新模式,对各类农产品在生产、加工、流通和消费等过程中的各阶段信息进行快速采集、信息管理。
4.另一方面,无人机,这一“酷炫”的前沿科技正在和农业联手,在农业生产过程中使用的无人机数量正在稳步增加。在种植环境分析、土壤分析、肥料农业的靶向施用、风暴追踪、安全监测、污染控制以及空气监测等领域,无人机均有用武之地。在我国,随着无人机技术的迅速提高,农业无人机也正在应用于农作物健康、水分应用、土壤分析等土地实时信息的收集,帮助农户更好地管理农作物,实现“精准农业”。未来,无人机在农业领域的应用潜力十分巨大。
5.如何基于互联网、计算机、物联网、大数据处理等技术,通过无人机对特色农产品的加工全过程数据采集管理及实时监控呈现加工过程,实现远程、透明的市场销售途径是当下农产品加工、销售现代化方向值得研究的问题。
技术实现要素:
6.本发明的目的是提供基于无人机航拍的特色农产品生产全过程数据管理与实时直播方法,该方法基于互联网、物联网、数据处理等技术,以无人机为信息采集手段,实现对农产品加工过程监控及信息采集并将实时加工状态远程呈现给市场,确保农产品加工安全、质量安全,助力农产品销售。
7.本发明的上述技术目的是通过以下技术方案得以实现的:
8.本发明提供了一种基于无人机航拍的特色农产品生产全过程数据管理方法,所述方法具体包括以下步骤:
9.1)建立三级网点;
10.对农产品生产加工基地用设定大小的立方体区域单元划分形成覆盖生产加工基地的一级区域立体网格,在一级区域立体网格的基础上,根据生产加工线所处位置,沿着生产加工线以设定距离为间隔点形成覆盖生产加工线的二级线网点,沿着二级线网点对生产
加工线重点工位进行取样标记作为特殊网点;
11.2)路径规划及悬停时间设置;
12.基于一级区域立体网格、二级线网点和特殊网点规划无人机巡航路径,并设置处于各级网点的悬停时间;
13.3)在工业计算机的数据库中建立生产环境对标数据模型、加工过程对标数据模型、农产品对标数据模型,用于判断农产品生产过程各指标是否符合预设要求;并在农产品生产加工基地布设传感器用于获取生产加工线设备参数、生产过程的节拍信号和农产品状态;传感器监测获取的信号直接传输给工业计算机;
14.4)无人机沿着巡航路径到达目标位置,通过获取网点信息并判断网点类型,作出悬停时间的选择后,进行生产加工线目标位置处的延时拍摄;同时,无人机实时拍摄的图像进行现场直播;
15.5)数据信号传送
16.无人机处理后的拍摄图像传送至工业计算机;传感器采集的数据反馈到工业计算机;
17.6)数据对标及决策
18.在工业计算机中将无人机拍摄图像处理后得出的数据、传感器反馈的数据和加工后农副产品的检测数据与步骤3)中对应的数据模型进行对标并判断是否合格;若合格则不需要对农产品生产加工基地及生产加工线进行调整,否则对不合格对象进行纠正。
19.作为本发明的优选方案,步骤1)中,所述设定大小的立方体区域单元的尺寸为2m*2m*2m;二级线网点的设定间距为0.5m。
20.作为本发明的优选方案,2m*2m*2m的一级区域立体网格以地面为水平面设置标杆,建立xyz空间直角坐标系,按照xiyjzk标记所有网点,起始点为(x0,y0,z0),其中i,j,k按照网点相对起始点的距离取值,i,j,k=2n,其中n∈n*,在一级区域立体网格上对每个xiyjzk网点安置定位发射器和蓝牙标签;在一级区域立体网格内,确定生产加工线的高度h,沿着生产加工线以0.5米为间隔点做不同色标杆并标记(xi,yb,h),其中i,b取值为:i=2n,n∈n*,b=0.5m,m∈n*,h为加工生产线最高点离地面的距离,同样安置定位发射器和蓝牙标签,以此覆盖所有生产加工线的二级线网点;在二级线网点上,取生产加工线上的重点工位做不同色标杆并标记(xi,s
p
,h)安置定位发射器和蓝牙标签,其中p取值离所在加工生产线垂直x轴的距离,sp表示离x轴的距离;以此方法标记所有生产加工线,建立特殊网点。
21.作为本发明的优选方案,步骤2)中的巡航路径规划以一级区域立体网格初始点x0y0z0为起点,以生产加工线所在的水平位置为方向,采用s型走向,沿着一级区域立体网格作为无人机巡航路径。
22.作为本发明的优选方案,所述悬停时间按照三级网点设置,一级区域立体网格点(xi,yj,zk)设置悬停时间2s,二级线网点(xi,yb,h)设置悬停时间3s,特殊网点(xi,s
p
,h)设置悬停时间5s。
23.作为本发明的优选方案,所述生产环境对标数据模型预设有初建农产品生产加工基地环境要求,初建农产品生产加工基地环境要求包括基地布局和卫生要求、加工人员着装要求、空气质量要求;生产环境对标数据模型将无人机和传感器获取的数据与预设要求做比较,判断生产环境是否符合要求,其中基地布局和卫生、加工人员着装通过无人机拍摄
并将图像信号处理后发送到工业计算机作为生产环境对标数据寄存;空气质量要求根据农产品场地环境要求进行设置,空气质量数据由传感器采集并反馈给工业计算机。
24.作为本发明的优选方案,所述加工过程对标数据模型预设有农产品生产加工完整过程的预期要求;无人机通过图像拍摄记录农产品加工工序并将图像信号处理后发送至工业计算机作为加工过程对标数据寄存,由加工过程对标数据模型判断所获取的数据是否符合预取要求。
25.作为本发明的优选方案,所述农产品对标数据模型预设有农产品加工后农副产品的要求,农产品加工后农副产品的要求包括形状规则要求、产品重量稳定要求、颜色一致性要求、氨基氮与微生物数量要求,农产品对标数据模型将取样检测获取的加工后农副产品的上述要求对应的检测数据输入工业计算机寄存,并与预设要求做比较,判断农产品是否符合要求。
26.作为本发明的优选方案,所述步骤4)具体如下:
27.①
将无人机与工业计算机无线通信连接,无人机按照一级区域立体网格点形成的巡航路径从初始点(x0,y0,z0)待命,接到工业计算机无线通信发出的定位点指令后,无人机以设定速度沿着一级区域立体网格点连线的路径出发,在此过程中,无人机对接收到的定位点信号进行分析,辨别网点数据长度,确定悬停时间;
28.②
若工业计算机无其他指令发出,无人机在达到指定地点后,会在此前的定位点信号的基础上,对初始指令(x0,y0,z0)进行赋值相加,按照一级区域立体网格点形成的巡航路径巡航,其赋值方法如下:
29.i=0
30.j=j+2;
31.if j≥生产加工基地长度
32.j=0;
33.i=i+2;
34.k=2;
35.ifi>生产加工基地宽度
36.i=0,j=0,k=2;
37.loop
38.若接收到工业计算机给出的指令,则对该指令进行数据类型判断,若属于二级线网点(xi,yb,h)类型,比较b<j满足,则无人机优先执行二级线网点定位指令,并同样以0.2m/s的速度巡航,在二级线网点处悬停时间为3s,此后若无其他指令发出,则无人机会重新寻址未执行的赋值相加后的一级区域立体网格点指令,重新回到一级区域立体网格点形成的巡航路径巡航;若b>j,则先继续执行一级区域立体网格点,最后在执行该二级线网点指令;二级线网点赋值方法如下:
39.i=0;
40.h=加工生产线最高点离地面的距离;
41.b=0.5t;
42.t=2;
43.t=t++;
44.if t≥加工生产线长度
45.t=2;
46.i=i+2;
47.t=t++;
48.若在发出二级线网点(xi,yb,h)类型的指令后,随即发出特殊网点(xi,s
p
,h)的指令,则无人机在接收指令后通过判断网点数据类型和对比离开初始点的距离来选择执行指令,若b<p,则先执行二级线网点指令;若b>p,则选择优先级更高的(xi,s
p
,h)指令作为当前的执行命令,执行完毕则返回上一优先级指令;
49.③
在无人机巡航时,对所拍摄的图像进行数据同步进行远程直播;无人机将图像数据信息传送到工业计算机。
50.本发明具有以下有益效果:基于互联网、物联网、数据处理等技术,以无人机和设备传感器为信息采集手段,通过设置三级网格点和优先级的分配,有主次的对管理对象实施不同持续时间的监控和采集,尤其是对重点工位的监控,并且由工业计算机进行信息评判作出反馈使农产品生产加工基地的环境、设备参数、生产节奏得到及时调整。该发明不仅实现对农产品加工过程监控及信息采集的智能管理,而且能将实时的加工状态远程呈现给市场,既确保农产品加工安全、质量安全,又能使加工过程透明化,取得消费者的信赖,助力农产品销售。
附图说明
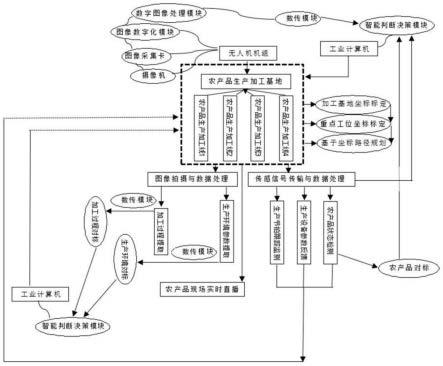
51.图1是一种基于无人机航拍的特色农产品生产全过程数据管理系统示意图;
52.图2是三级网格点执行的优先级逻辑图;
53.图3是农产品生产加工基地xyz空间直角坐标系示意图。
具体实施方式
54.以下结合附图对本发明作进一步详细说明。
55.如图1、2所示,一种基于无人机航拍的特色农产品生产全过程数据管理系统,包括对农产品生产加工基地坐标标定,农产品生产加工线重点工位标定,基于坐标标定规划无人机巡航路径,无人机机组沿巡航路径拍摄与图像处理,对特色农产品生产全过程实时监测,同时进行无人机机组视频远程传送;其次,通过农产品生产加工线上设备传感器检测与信号传输,对特色农产品的状态、生产节拍和生产设备参数进行监测;最终,实现无人机机组与工业计算机、生产加工设备传感器与工业计算机之间的通信并进行智能决策。
56.方法具体包括以下步骤:
57.(1)建立三级网点。对农产品生产加工基地以2m*2m*2m为立方体区域单元形成覆盖生产加工基地的一级区域立体网格,在一级区域立体网格的基础上,根据生产加工线所处位置,沿着生产加工线以0.5m为间隔点形成覆盖生产加工线的二级线网点,沿着二级线网点对生产加工线重点工位进行取样标记作为特殊网点。
58.(2)路径规划及悬停时间设置。基于一级区域立体网格、二级线网点和特殊网点规划无人机巡航路径,采用s型走向作为无人机巡航路径,并设置处于各级网点的悬停时间。
59.(3)在工业计算机的数据库中建立生产环境对标数据模型、加工过程对标数据+模
型、农产品对标数据模型,用于判断农产品生产过程各指标是否符合预设要求。
60.(4)无人机拍摄图像及图像处理。无人机沿着巡航路径到达目标位置,通过获取网点信息并判断网点类型,作出悬停时间的选择后,进行生产加工线目标位置处的延时拍摄,同时,无人机实时拍摄的图像进行现场直播。
61.(5)数据信号传送。一方面将无人机拍摄图像处理后得出的数据(包括加工过程、生产环境参数)传送至工业计算机;另一方面,传感器采集的数据(包括生产加工线设备参数、生产节拍信号和农产品状态)直接反馈到工业计算机;
62.(6)数据对标及决策。在工业计算机中将无人机拍摄图像处理后得出的数据、传感器采集的数据和加工后农副产品的检测数据与对应的数据模型进行对标并判断是否合格。若合格则不需要对农产品生产加工基地及生产加工线进行调整,否则对不合格对象进行现场纠正。
63.进一步的,2米*2米*2米一级区域立体网格以地面为水平面设置标杆,建立xyz空间直角坐标系,各网点取其立方形的顶点,按照顶点坐标xiyjzk标记所有网点,起始点为(x0,y0,z0),其中i,j,k按照网点相对起始点的距离取值(i,j,k=2n,其中n∈n*),如在起始点的体对角上的点记为(x2,y2,z2),在一级区域立体网格上对每个xiyjzk网点安置定位发射器和蓝牙标签;在一级区域立体网格内,确定生产加工线的高度h,沿着生产加工线以0.5米为间隔点做不同色标杆并标记(xi,yb,h),其中i,b取值为(i=2n,n∈n*,b=0.5t,t∈n*),h为加工生产线最高点离地面的距离,同样安置定位发射器和蓝牙标签,以此覆盖所有生产加工线的二级线网点;在二级线网点上,取生产加工线上的重点工位做不同色标杆并标记(xi,s
p
,h),安置定位发射器和蓝牙标签,其中p取值离所在加工生产线垂直x轴的距离,sp赋值为p的数值,表示离x轴的距离;以此方法标记所有生产加工线,建立特殊网点。
64.进一步的,路径规划以一级区域立体网格初始点x0y0z0为起点,以生产加工线所在的水平位置为方向,采用s型走向,沿着一级区域立体网格点与点连线作为无人机巡航路径。
65.进一步的,悬停时间按照三级网点设置,一级区域立体网格点(xi,yj,zk)设置悬停时间2s,二级线网点(xi,yb,h)设置悬停时间3s,特殊网点(xi,s
p
,h)设置悬停时间5s。其中,三级网点的横坐标相同。例如假设设有3条平行且间隔相等的生产线,每一条生产线的工位x轴坐标都一样。
66.进一步的,生产环境对标数据模型取自初建农产品生产加工基地环境,包括基地布局和卫生要求、加工人员着装要求、空气质量要求,其中基地布局和卫生、加工人员着装通过无人机拍摄并将图像信号处理后发送到工业计算机作为生产环境对标数据寄存;空气质量数据根据农产品场地环境要求进行设置。
67.进一步的,加工过程对标数据模型取自农产品生产加工完整过程的无人机图像拍摄,记录农产品完整加工工序并将图像信号处理后发送至工业计算机作为加工过程对标数据寄存。
68.进一步的,农产品对标数据模型取自农产品加工后农副产品的要求,设置范围包括形状规则、产品重量稳定、颜色一致性、氨基氮与微生物数量,并在工业计算机寄存。
69.进一步的,无人机拍摄图像及图像处理过程具体如下:
70.①
将无人机与工业计算机无线通信连接,无人机按照一级区域立体网格点形成的
巡航路径从初始点(x0,y0,z0)待命,接到工业计算机无线通信发出的定位点指令后,无人机以0.2m/s的速度沿着一级区域立体网格点连线的路径出发,在此过程中,无人机对接收到的定位点信号进行分析,辨别网点数据长度,确定悬停时间。
71.②
若工业计算机无其他指令发出,无人机在达到指定地点后,会在此前的定位点信号的基础上,对初始指令(x0,y0,z0)进行赋值相加,按照一级区域立体网格点形成的巡航路径巡航,其赋值方法如下:
72.i=0
73.j=j+2;
74.if j≥生产加工基地长度
75.j=0;
76.i=i+2;
77.k=2;
78.if i>生产加工基地宽度
79.i=0,j=0,k=2;
80.loop
81.若接收到工业计算机给出的指令,则对该指令进行数据类型判断,若属于二级线网点(xi,yb,h)类型,比较b<j满足,则无人机优先执行二级线网点定位指令,并同样以0.2m/s的速度巡航,在二级线网点处悬停时间为3s,此后若无其他指令发出,则无人机会重新寻址未执行的赋值相加后的一级区域立体网格点指令,重新回到一级区域立体网格点形成的巡航路径巡航;若b>j,则先继续执行一级区域立体网格点,最后在执行该二级线网点指令。二级线网点赋值方法如下:
82.i=u;
83.h=加工生产线最高点离地面的距离;
84.b=0.5t;
85.t=2;
86.t=t++;
87.if t≥加工生产线长度
88.t=2;
89.i=i+2;
90.t=t++;
91.若在发出二级线网点(xi,yb,h)类型的指令后,随即发出特殊网点(xi,s
p
,h)的指令,则无人机在接收指令后通过判断网点数据类型和对比离开初始点的距离来选择执行指令,若b<p,则先执行二级线网点指令;若b>p,则选择优先级更高的(xi,s
p
,h)指令作为当前的执行命令,执行完毕则返回上一优先级指令。
92.③
在无人机巡航时,对所拍摄的图像进行数据处理并同步将图像进行远程直播。无人机通过摄像机、图像采集卡、图像数字化模块、数字图像处理模块等过程后,由数传模块将取样处理后的数据信息传送到工业计算机;另外,生产加工线设备参数、传感器采集的生产节拍信号和农产品状态等信息通过生产加工线设备、传感器与工业计算机的直接串行口通信将信息反馈到工业计算机。
93.④
反馈到工业计算机的数据信息由工业计算机的智能判断决策模块进行评判,并将结果由工业计算机反馈到农产品生产加工基地,决定是否整改生产加工基地和调整设备参数。
94.在本发明的一个具体实施例中,所述生产环境对标数据模型预设有初建农产品生产加工基地环境要求,初建农产品生产加工基地环境要求包括基地布局和卫生要求、加工人员着装要求、空气质量要求;生产环境对标数据模型将无人机和传感器获取的数据与预设要求做比较,判断生产环境是否符合要求,其中基地布局和卫生、加工人员着装通过无人机拍摄并将图像信号处理后发送到工业计算机作为生产环境对标数据寄存;空气质量要求根据农产品场地环境要求进行设置,空气质量数据由传感器采集并反馈给工业计算机。
95.在本发明的一个具体实施例中,所述加工过程对标数据模型预设有农产品生产加工完整过程的预期要求;无人机通过图像拍摄记录农产品加工工序并将图像信号处理后发送至工业计算机作为加工过程对标数据寄存,由加工过程对标数据模型判断所获取的数据是否符合预取要求。
96.在本发明的一个具体实施例中,所述农产品对标数据模型预设有农产品加工后农副产品的要求,农产品加工后农副产品的要求包括形状规则要求、产品重量稳定要求、颜色一致性要求、氨基氮与微生物数量要求,农产品对标数据模型将取样检测获取的加工后农副产品的上述要求对应的检测数据输入工业计算机寄存,并与预设要求做比较,判断农产品是否符合要求。
97.该发明不仅实现对农产品加工过程监控及信息采集的智能管理,而且能将实时的加工状态远程呈现给市场,既确保农产品加工安全、质量安全,又能使加工过程透明化,取得消费者的信赖,助力农产品销售。
98.具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1