全电驱测井车控制系统及控制方法与流程
本发明属于油田机械,涉及一种全电驱测井车控制系统。
背景技术:
1、油田测井车在测井作业过程中,井下测井仪器对测井电缆的测井速度和张力变化大小有严格的要求。目前,油田所使用的液压测井车只能对整个测井作业进行开环手动控制,这就要求绞车操作人员在测井过程中时刻要关注各参数显示面板以及绞车状态。电缆差分张力异常时,更多凭操作人员的经验来判断井下状态并进行解阻、解卡操作,作业整体劳动强度大,工作效率低,造成测井过程中出现问题不能及时有效判断处理,影响油井数据质量。同时,测井数据目前只能本地存储,而不能实时传输进行分析,继而直接影响了测井作业的效率。
技术实现思路
1、本发明的目的是提供一种全电驱测井车控制系统,实现了测井过程的全自动化控制并进行遇阻遇卡识别,提高了测井效率和测井曲线的质量。
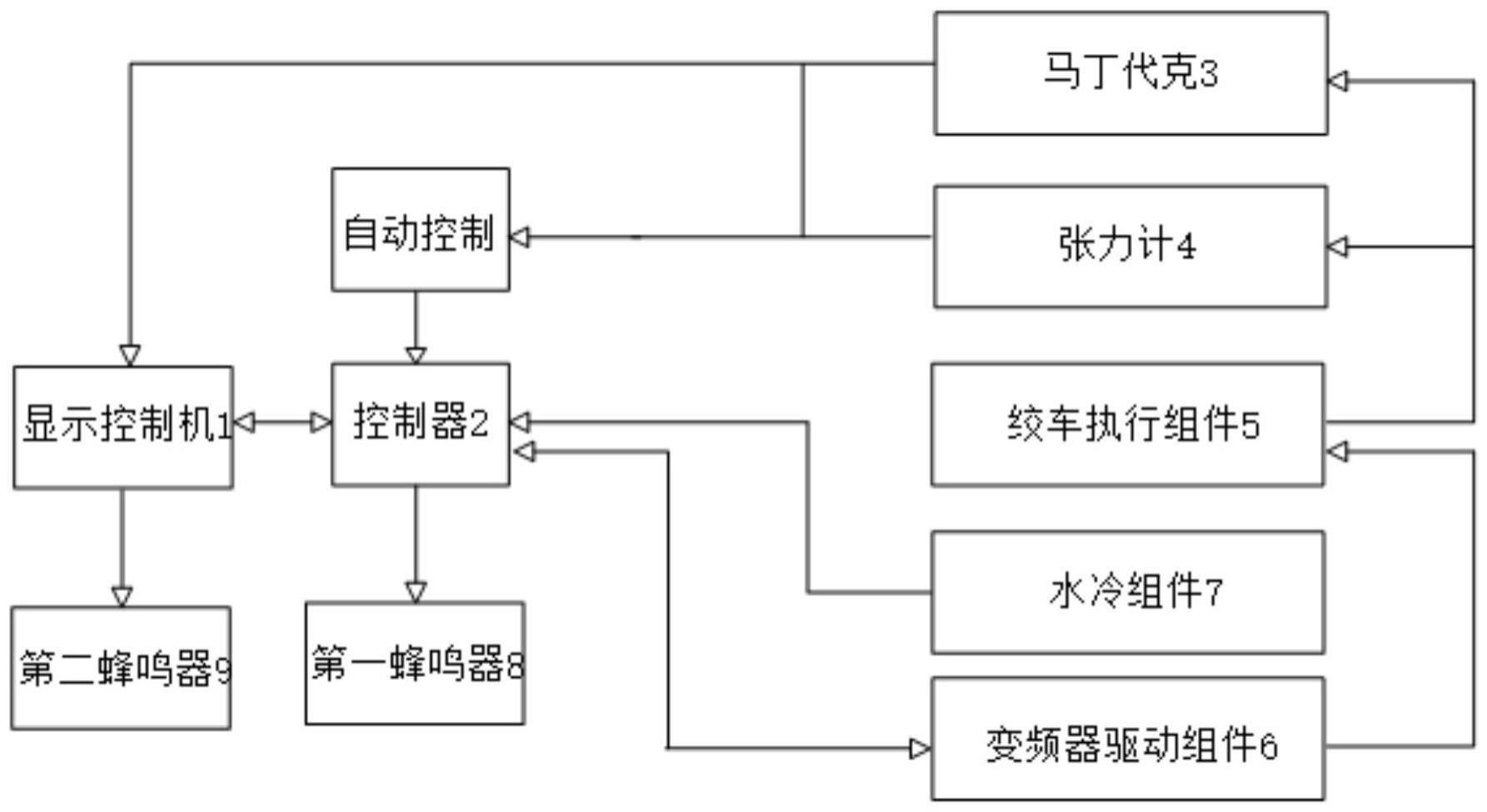
2、本发明所采用的技术方案是全电驱测井车控制系统,包括控制器,控制器连接显示控制机、马丁代克、张力计、绞车执行组件、变频器驱动组件、水冷组件;其中,变频器驱动组件连接绞车执行组件,绞车执行组件连接马丁代克和张力计,显示控制机连接马丁代克和张力计;
3、显示控制机用于实时显示控制器、马丁代克、张力计的信号,同时根据需求发送控制需求给控制器;
4、马丁代克用于测量作业时的深度信息,并将采集到的深度脉冲信号反馈给控制器;
5、张力计用于测量作业时的张力信息,并将采集到的张力信号反馈给控制器;
6、绞车执行组件用于控制电缆的收发,并将采集到的控制信号反馈给控制器;
7、变频器驱动组件通过控制器传递的信号控制输出调节滚筒动作,确保稳定的测井速度或电缆张力;
8、水冷组件用于控制流量的大小、水泵的启动、冷却液液位的变化,并将采集的水冷系统流量信号、水泵启动电流信号、冷却液液位信号传送至控制器。
9、本发明的特点还在于:
10、控制器将马丁代克和张力计反馈的信号通过can通讯传送给变频器驱动组件。
11、控制器上连接有第一报警蜂鸣器,第一报警蜂鸣器用于监测控制器传送的系统参数,通过将系统参数与设定值进行对比,若系统参数异常则发出警报提醒。
12、显示控制机上连接有第二报警蜂鸣器,第二报警蜂鸣器用于监测显示控制机传送的测井参数,通过将测井参数与设定值进行对比,若测井参数异常则发出警报提醒。
13、系统包括本地控制与远程控制两种通讯模式,数据传输方式为数据实时传输。
14、本地控制包括手动控制作业模式和手动控制作业切换本地自动控制作业模式,远程控制为自动控制作业模式切换远程自动控制的作业模式。
15、控制器型号为epec2024。
16、本发明的另一目的是提供一种基于此全电驱测井车控制系统的控制方法,具体按照以下步骤实施:
17、步骤1:确认测井的作业模式;
18、步骤2:测井速度达到要求时开始作业。
19、本发明的特点还在于:
20、步骤1中的作业模式为本地自动控制或远程自动控制作业时,按照如下步骤实施:
21、步骤1.1:设定初始测井速度;
22、步骤1.2:;控制器通过马丁代克采集实时测井速度,并根据初始设定速度进行pid计算,将变频器控制信号输出至变频器驱动组件;
23、步骤1.3:变频器驱动组件根据控制信号输出调整滚筒动作,从而得到稳定的设定测井速度;
24、步骤1中的作业模式为本地手动控制时,通过绞车执行组件控制测井速度。
25、在恒速状态下控制测井速度的步骤如下:制动状态下,设定测井恒定速度值;根据设定速度,进行绞车加速;实时采集电缆速度信号,达到设定速度;根据设定速度,进行pid计算,输出变频器控制调节信号;设定新的测井速度,进行动态调速,最终得到稳定的测井速度。
26、在恒张力状态下控制测井张力区间的步骤如下:解除制动状态下,设定测井恒定张力值;根据设定张力,进行预拉,使电缆达到拉起状态;实时采集张力计张力信号,达到设定张力区间;根据设定张力,进行pid计算,输出变频器控制调节信号;设定新的恒定张力,进行动态调节,最终得到稳定的张力区间。
27、本发明的全电驱测井车控制系统通过设备通信和数据传输采用vpn虚拟专网网络技术实现测井过程的本地或远程自动化控制,可实现测井过程中遇阻遇卡的识别和自动解卡,减轻操作人员劳动强度,提高测井效率和测井曲线的质量,降低测井作业风险,提高设备可靠性。
技术特征:
1.全电驱测井车控制系统,其特征在于,包括控制器(2),所述控制器(2)连接显示控制机(1)、马丁代克(3)、张力计(4)、绞车执行组件(5)、变频器驱动组件(6)、水冷组件(7);其中,所述变频器驱动组件(6)连接绞车执行组件(5),所述绞车执行组件(5)连接马丁代克(3)和张力计(4),所述显示控制机(1)连接马丁代克(3)和张力计(4);
2.根据权利要求1所述的全电驱测井车控制系统,其特征在于,所述控制器(2)将马丁代克(3)和张力计(4)反馈的信号通过can通讯传送给变频器驱动组件(6)。
3.根据权利要求1所述的全电驱测井车控制系统,其特征在于,所述控制器(2)上连接有第一报警蜂鸣器(8),所述第一报警蜂鸣器(8)用于监测控制器(2)传送的系统参数,通过将系统参数与设定值进行对比,若系统参数异常则发出警报提醒。
4.根据权利要求1所述的全电驱测井车控制系统,其特征在于,所述显示控制机(1)上连接有第二报警蜂鸣器(9),所述第二报警蜂鸣器(9)用于监测显示控制机(1)传送的测井参数,通过将测井参数与设定值进行对比,若测井参数异常则发出警报提醒。
5.根据权利要求1所述的全电驱测井车控制系统,其特征在于,所述系统包括本地控制与远程控制两种通讯模式,数据传输方式为数据实时传输本地控制包括手动控制作业模式和手动控制作业切换本地自动控制作业模式,远程控制为自动控制作业模式切换远程自动控制的作业模式。
6.根据权利要求1所述的全电驱测井车控制系统,其特征在于,所述控制器(2)型号为epec2024。
7.根据权利要求1-6所述的全电驱测井车控制系统的控制方法,其特征在于,所述具体按照以下步骤实施:
8.根据权利要求7所述的全电驱测井车控制系统的控制方法,其特征在于,所述步骤1中的作业模式为本地自动控制或远程自动控制作业时,按照如下步骤实施:
9.根据权利要求8所述的全电驱测井车控制系统的控制方法,其特征在于,在恒速状态下控制测井速度的步骤如下:制动状态下,设定测井恒定速度值;根据设定速度,进行绞车加速;实时采集电缆速度信号,达到设定速度;根据设定速度,进行pid计算,输出变频器控制调节信号;设定新的测井速度,进行动态调速,最终得到稳定的测井速度。
10.根据权利要求7所述的全电驱测井车控制系统的控制方法,其特征在于,在恒张力状态下控制测井张力区间的步骤如下:解除制动状态下,设定测井恒定张力值;根据设定张力,进行预拉,使电缆达到拉起状态;实时采集张力计张力信号,达到设定张力区间;根据设定张力,进行pid计算,输出变频器控制调节信号;设定新的恒定张力,进行动态调节,最终得到稳定的张力区间。
技术总结
本发明公开了全电驱测井车控制系统,包括控制器,控制器连接显示控制机、马丁代克、张力计、绞车执行组件、变频器驱动组件、水冷组件;其中,变频器驱动组件连接绞车执行组件,绞车执行组件连接马丁代克和张力计,显示控制机连接马丁代克和张力计;同时,还公开了一种全电驱测井车控制方法。其具有三种控制模式,分别为手动控制作业模式、本地自动控制作业模式、远程自动控制,三种控制作业模式互为备份,提高了设备操作可靠性。通过CAN通讯技术实现绞车自动控制及远程监控,运用传感器反馈数据实现设备运转的闭环控制,利用大数据系统实现测井数据实时上传,提高了绞车自我诊断能力以及测井效率和质量,减少了绞车人员数量需求和技术水平要求。
技术研发人员:南建武,姚伟锋,鲁璐宇,王来智,杨鹏,刘金龙,张涛,马国梁,张杨根,李志伟
受保护的技术使用者:宝鸡宝石特种车辆有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!