一种面向震后废墟环境起降的搜救无人机及其具有的系统
1.本发明涉及无人机设备技术领域,具体是指一种面向震后废墟环境起降的搜救无人机及其具有的系统。
背景技术:
2.从目前的搜救无人机设计来看,无人机主要通过携带高清摄像头、热成像摄像头进行被困人员的搜索,其对在建筑表层的被困人员搜救有较好的效果,但是结合仍然存在以下的问题:(1)、不能进入到建筑内部搜寻,无法获知建筑内是否有被救人员;(2)、不能接近被困人员,怕桨叶对其造成二次伤害,在被困人员昏迷的情况下无法判断其身体状况;(3)、无法对废墟中狭小空间进行搜索,无人机容易损毁;(4)、受到电量限制和扇叶噪音影响,搜救人员无法通过无人机与被困人员建立沟通,在不能快速实施救援的环境,如楼内、有高度差的废墟等场景,增加了救援的难度,盲目施救会增加搜救人员的危险系数。需要说明的是,对于受伤,昏迷,老年群体被困的情况,都需要救援人员进入废墟或建筑内进行搜救,大地震过后总伴随着余震,废墟和建筑都处于不稳定的结构状态下,极有可能受到二次或多次垮塌的影响,进入建筑内搜救,会增大救援队员的工作量和危险性。
3.还需要说明的是,由于震后救援环境的复杂性,其往往还伴随着频率较高的余震,在这种环境下,底面崎岖不平,严重影响了搜救的起降。更为具体的,对于震后图像数据采集及救援,一般利用多旋翼无人机采用平行飞行的方式,镜头垂直向下拍摄多张图像,且相邻两张照片的拍摄区域重合度在一定值以上(一般为80%)的飞行航拍方法,其拍摄的照片在经过专业软件的后续处理后,可生成无人机镜头拍摄的航拍照片覆盖全部区域的dem、dsm、dom、三维模型等产品,受限于无人机续航时间,每架无人机飞行覆盖面积一般不超过0.16平方千米,汶川地震发生后,曾有诸多学者采用这种方法,对北川县城进行数据采集。但是,上述采集到的图像信息缺少倾斜角度图像数据,虽然能够生成三维模型,。但其侧面纹理质量就较差,结构失真比较大,并且能够针对幸存者所在位置的障碍物尺寸信息的无人机系统尚未见报道。
技术实现要素:
4.本发明目的在于提供一种面向震后废墟环境起降的搜救无人机,用于解决现有的搜救无人机无法在震后废墟环境下稳定起降的问题;一种面向震后废墟环境起降的搜救无人机具有的系统,用于采集具有倾斜角度图像数据的图像,并建立带有幸存者所在位置障碍物尺寸信息的三维模型。
5.本发明通过下述技术方案实现:一种面向震后废墟环境起降的搜救无人机,包括防撞罩,还包括无人机本体与用于调节无人机本体飞行状态的调节罩,调节罩设置在防撞罩的内部,无人机本体设置在调节的中心且能够保持重心始终向下。现有技术中,虽然已经存在部分通过在无人机外部设置球形防撞罩结构来保护内部无人机的结构,但是其均存在着无法在震后废墟环境下稳定起降的问题,具体地,大地震过后总伴随余震,废墟和建筑都
处于不稳定结构状态下,可能造成二次或多次垮塌,而地震的发生均会对地面造成不可逆的破坏,即地面始终凹凸不平,现有技术中的无人机由于在此地面上重心不稳定,无法在这种环境进行平稳起降。鉴于上述情况,申请人提出了一种面向震后废墟环境起降的搜救无人机,具体通过在防撞罩与无人机本体之间设置调节罩,无人机本体设置在调节罩内,而调节罩与防撞罩的配合关系能够使得无人机本体的重心始终向下,即无论无人机翻滚任何角度后,在调节罩的作用下,无人机本体始终相对水平,能够保持一个相对良好的起飞条件,完全无视崎岖不平地面的影响。
6.进一步地,调节罩包括由外至内依次设置的第一圆环、第二圆环、第三圆环以及活动轴,第一圆环与第二圆环、第二圆环与第三圆环之间通过活动轴连接,无人机本体与第三圆环连接,防撞罩与第一圆环连接。更为具体的,调节罩具体包括由外至内依次设置的第一圆环、第二圆环、第三圆环以及活动轴,第二圆环通过活动轴设置在第一圆环上,且能够相对转动;第三圆环通过活动轴设置在第二圆环上,且能够相对转动,基于上述结构,无人机本体在空间结构上具有多个自由度,能够始终保持无人机本体的重心向下。需要说明的是,现有技术中的部分带有防撞罩的无人机在进行翻滚时,其内部的无人机调整的响应速度较慢,在一个翻滚动作未结束时就即将具有下一翻滚动作的运动趋势,这种状态不利于内部无人机的保护。而对于本技术而言,在进行连续翻滚作用时,可以略过中间步骤的翻滚动作,即其响应速度极快,在翻滚过程中完成自我调节过程。
7.进一步地,活动轴包括:活动座、活动杆、球面滚珠以及轴套,活动座的底部与第一圆环或第二圆环连接,活动座的开口端设置有密封盖,轴套设置在活动座的内部,活动杆的一端通过球面滚珠设置在轴套的内部,活动杆的另一端活动贯穿密封盖与第二圆环或第三圆环连接。由于活动轴需要实现第二圆环与第三圆环的自转动,其静摩擦力需要尽可能地小,现有技术中的转动轴承在震后环境等特殊条件下存在着静摩擦力较大的情况,即当无人机整体在翻滚的情况下,第二圆环与第三圆环无法自转动,即相对第一圆环静止,此时,无人机本体无法保持重心始终向下的状态。鉴于这一情况,申请人通过在活动杆与轴套之间设置球面滚珠来降低静摩擦力,更为具体的,活动座内采用油封。
8.进一步地,无人机本体包括:红外热成像相机、标定相机以及高清相机,红外热成像相机、标定相机以及高清相机均设置在无人机本体的底部,标定相机与高清相机形成标定云台。通过红外热成像相机检测幸存者的具体位置,标定相机能够建立标定坐标系并将位置信息标定为坐标信号,高清相机能够采集幸存者位置范围内的图像信息并建立三维模型。
9.一种面向震后废墟环境起降的搜救无人机具有的系统,包括:信号增益单元、视觉测量单元以及处理器单元,视觉测量单元与信号增益单元信号连接,信号增益单元与处理器单元信号连接,视觉测量单元用于检测幸存者位置信息并标定产生位置信号,信号增益单元与处理器单元信号连接,信号增益单元用于增益幸存者位置信号。现有技术中,对于震后图像数据采集及救援,一般利用多旋翼无人机采用平行飞行的方式,镜头垂直向下拍摄多张图像,且相邻两张照片的拍摄区域重合度在一定值以上(一般为80%)的飞行航拍方法,其拍摄的照片在经过专业软件的后续处理后,可生成无人机镜头拍摄的航拍照片覆盖全部区域的dem、dsm、dom、三维模型等产品。但是,上述采集到的图像信息缺少倾斜角度图像数据,虽然能够生成三维模型,。但其侧面纹理质量就较差,结构失真比较大。并且现有技
术中构建的三维模型还缺少对应的障碍物具体尺寸,仅能提供幸存者的基础位置坐标,对于其详细的附近地形无法模拟,不利于搜救人员的救援,甚至可能增大救援人员的工作量和危险性。例如,对于受伤、昏迷、老年群体被困的情况,都需要救援人员进入废墟或建筑内搜救,对于搜救人员而言,不熟悉的地形盲目救援可能导致对幸存者的二次伤害,甚至使得自身置于危险处境,因此,亟待采集幸存者具体地形模拟数据显得尤为重要。
10.鉴于上述情况,申请人提出了一种面向震后废墟环境起降的搜救无人机具有的搜救系统,具体通过视觉测量单元监测特定区域范围内的幸存者位置信息,并通过采集附近图像信息构建三维模型,需要说明的是,区别于现有技术中的三维模型,本技术构建的三维模型中具有倾斜角度图像数据,并且还具有障碍物的尺寸数据,为救援人员的救援规划提供了理论基础;通过信号增益单元的调制增益将图像信号增强,避免震后环境的高强电磁干扰;再最终通过处理器单元将所有幸存者的位置信号统计汇总并将该区域范围内的地形模拟,规划出合理的救援路线,提高救援效率。
11.进一步地,视觉测量单元包括:图像采集模块以及图像处理模块,图像采集模块与红外热成像相机、标定相机以及高清相机信号连接,红外热成像相机用于检测幸存者位置,标定相机用于建立标定坐标系并将位置信息标定为坐标信号,高清相机用于采集幸存者位置范围内500m的图像信息并建立三维模型;图像处理模块与图像采集模块信号连接,用于确定幸存者位置在标定坐标系内的倾斜轴与倾斜角,并调整坐标图像的绝对畸变度,再计算障碍物的图像角点,将图像角点映射到标定坐标系中确定幸存者位置信息范围内的障碍物具体尺寸信息,最终将尺寸信息转换为图像模拟信号。需要说明的是,现有技术的无人机航拍图像的倾斜方向和倾斜角度不尽相同,整体图像有较大程度的扭曲,构建出的三维模型与实际地形存在较大差异,不利于救援,在此技术上,通过视觉测量单元求解出相关的倾斜角度图像数据,能够增加三维模型的准确度。
12.进一步地,信号增益单元包括:信号分析模块、信号处理模块以及信号调制模块,信号分析模块与图像处理模块信号连接,用于接收图像模拟信号,并对图像模拟信号进行分析比对;信号处理模块与信号分析模块信号连接,用于根据信号分析模块的分析比对结果进行处理;信号调制模块与信号处理模块信号连接,用于对处理后的图像模拟信号进行调制增益。需要说明的是,由于震后地电场与地磁场的复杂性,对无人机的信号传输能够造成极大干扰,严重影响到图像信息的传输,在此技术上,申请人通过在无人机救援系统内设置信号增益单元来增强图像信号,从而减少地电场、地磁场的复杂变化引起的电磁干扰。
13.进一步地,处理器单元与信号调制模块信号连接,用于统计区域内的所有幸存者图像模拟信号,并将所有幸存者图像模拟信号进行归纳整理,建立带有幸存者图像模拟信号的三维模型并规划飞行路线。需要说明的是,本技术还能将特定区域范围内的所有幸存者信息进行汇总统计,构建出该区域范围内带有幸存者位置信息、障碍物尺寸信息的三维模型,并且还能规划出合理的飞行救援路线,为救援提供数据理论支持。
14.本发明与现有技术相比,具有如下的优点和有益效果:
15.1、本发明的调节罩设置在防撞罩的内部,能够避免震后复杂环境对无人机造成的损害,且无人机本体的重心始终向下解决了现有的搜救无人机无法在震后废墟环境下稳定起降的问题;
16.2、本发明的视觉测量单元提供了相关的倾斜角度图像数据,采集了具有倾斜角度
图像数据的图像,并建立带有幸存者所在位置障碍物尺寸信息的三维模型;
17.3、本发明的信号增益单元能够减少震后复杂电磁环境的干扰,从而有利于图像信息的传输。
附图说明
18.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
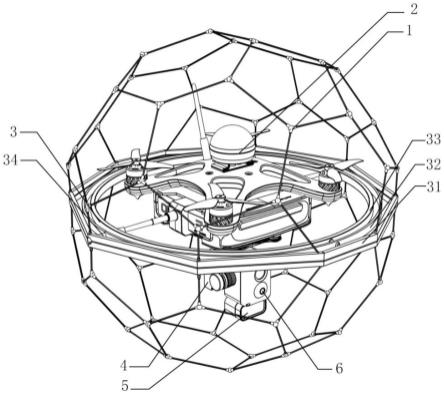
19.图1为本发明的结构示意图;
20.图2为活动轴的结构示意图;
21.图3为活动轴的内部结构示意图;
22.图4为本发明的系统框架图。
23.附图中标记及对应的零部件名称:
24.1-防撞罩,2-无人机本体,3-调节罩,31-第一圆环,32-第二圆环,33-第三圆环,34-活动轴,341-活动座,342-活动杆,343-球面滚珠,344-轴套,345-密封盖,4-红外热成像相机,5-标定相机,6-高清相机。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。需要说明的是,本发明已经处于实际研发使用阶段。
26.实施例1:
27.请一并参考附图1~图4,如图所示,一种面向震后废墟环境起降的搜救无人机,包括防撞罩1,还包括无人机本体2与用于调节无人机本体2飞行状态的调节罩3,调节罩3设置在防撞罩1的内部,无人机本体2设置在调节的中心且能够保持重心始终向下。现有技术中,虽然已经存在部分通过在无人机外部设置球形防撞罩1结构来保护内部无人机的结构,但是其均存在着无法在震后废墟环境下稳定起降的问题,具体地,大地震过后总伴随余震,废墟和建筑都处于不稳定结构状态下,可能造成二次或多次垮塌,而地震的发生均会对地面造成不可逆的破坏,即地面始终凹凸不平,现有技术中的无人机由于在此地面上重心不稳定,无法在这种环境进行平稳起降。鉴于上述情况,申请人提出了一种面向震后废墟环境起降的搜救无人机,具体通过在防撞罩1与无人机本体2之间设置调节罩3,无人机本体2设置在调节罩3内,而调节罩3与防撞罩1的配合关系能够使得无人机本体2的重心始终向下,即无论无人机翻滚任何角度后,在调节罩3的作用下,无人机本体2始终相对水平,能够保持一个相对良好的起飞条件,完全无视崎岖不平地面的影响。更为具体地,由于无人机在第三圆环33的中心且重心始终向下,第一圆环31、第二圆环32以及第三圆环33能够相对转动,当无人机发生滚动时,无人机本体2会随着防撞罩1的运动而自我调节平衡,始终保持无人机本体2垂直朝上的状态,以满足起飞条件,防撞罩1的富勒烯结构有利于在废墟上停靠,满足了接近幸存者的情景需求。
28.需要说明的是,调节罩3包括由外至内依次设置的第一圆环31、第二圆环32、第三圆环33以及活动轴34,第一圆环31与第二圆环32、第二圆环32与第三圆环33之间通过活动
轴34连接,无人机本体2与第三圆环33连接,防撞罩1与第一圆环31连接。还需要说明的是,调节罩3具体包括由外至内依次设置的第一圆环31、第二圆环32、第三圆环33以及活动轴34,第二圆环32通过活动轴34设置在第一圆环31上,且能够相对转动;第三圆环33通过活动轴34设置在第二圆环32上,且能够相对转动,基于上述结构,无人机本体2在空间结构上具有多个自由度,能够始终保持无人机本体2的重心向下。再需要说明的是,现有技术中的部分带有防撞罩1的无人机在进行翻滚时,其内部的无人机调整的响应速度较慢,在一个翻滚动作未结束时就即将具有下一翻滚动作的运动趋势,这种状态不利于内部无人机的保护。而对于本技术而言,在进行连续翻滚作用时,可以略过中间步骤的翻滚动作,即其响应速度极快,在翻滚过程中完成自我调节过程。
29.需要说明的是,活动轴34包括:活动座341、活动杆342、球面滚珠343以及轴套344,活动座341的底部与第一圆环31或第二圆环32连接,活动座341的开口端设置有密封盖345,轴套344设置在活动座341的内部,活动杆342的一端通过球面滚珠343设置在轴套344的内部,活动杆342的另一端活动贯穿密封盖345与第二圆环32或第三圆环33连接。由于活动轴34需要实现第二圆环32与第三圆环33的自转动,其静摩擦力需要尽可能地小,现有技术中的转动轴承在震后环境等特殊条件下存在着静摩擦力较大的情况,即当无人机整体在翻滚的情况下,第二圆环32与第三圆环33无法自转动,即相对第一圆环31静止,此时,无人机本体2无法保持重心始终向下的状态。鉴于这一情况,申请人通过在活动杆342与轴套344之间设置球面滚珠343来降低静摩擦力,优选的,活动座341内采用油封。
30.需要说明的是,无人机本体2包括:红外热成像相机4、标定相机5以及高清相机6,红外热成像相机4、标定相机5以及高清相机6均设置在无人机本体2的底部,标定相机5与高清相机6形成标定云台。通过红外热成像相机4检测幸存者的具体位置,标定相机5能够建立标定坐标系并将位置信息标定为坐标信号,高清相机6能够采集幸存者位置范围内的图像信息并建立三维模型。具体地,标定相机5为开源函数标定相机5,红外热成像相机4与高清相机6均为现有技术标配型号。
31.一种面向震后废墟环境起降的搜救无人机具有的系统,包括:信号增益单元、视觉测量单元以及处理器单元,视觉测量单元与信号增益单元信号连接,信号增益单元与处理器单元信号连接,视觉测量单元用于检测幸存者位置信息并标定产生位置信号,信号增益单元与处理器单元信号连接,信号增益单元用于增益幸存者位置信号。现有技术中,对于震后图像数据采集及救援,一般利用多旋翼无人机采用平行飞行的方式,镜头垂直向下拍摄多张图像,且相邻两张照片的拍摄区域重合度在一定值以上(一般为80%)的飞行航拍方法,其拍摄的照片在经过专业软件的后续处理后,可生成无人机镜头拍摄的航拍照片覆盖全部区域的dem、dsm、dom、三维模型等产品。但是,上述采集到的图像信息缺少倾斜角度图像数据,虽然能够生成三维模型,。但其侧面纹理质量就较差,结构失真比较大。并且现有技术中构建的三维模型还缺少对应的障碍物具体尺寸,仅能提供幸存者的基础位置坐标,对于其详细的附近地形无法模拟,不利于搜救人员的救援,甚至可能增大救援人员的工作量和危险性。例如,对于受伤、昏迷、老年群体被困的情况,都需要救援人员进入废墟或建筑内搜救,对于搜救人员而言,不熟悉的地形盲目救援可能导致对幸存者的二次伤害,甚至使得自身置于危险处境,因此,亟待采集幸存者具体地形模拟数据显得尤为重要。
32.鉴于上述情况,申请人提出了一种面向震后废墟环境起降的搜救无人机具有的搜
救系统,具体通过视觉测量单元监测特定区域范围内的幸存者位置信息,并通过采集附近图像信息构建三维模型,需要说明的是,区别于现有技术中的三维模型,本技术构建的三维模型中具有倾斜角度图像数据,并且还具有障碍物的尺寸数据,为救援人员的救援规划提供了理论基础;通过信号增益单元的调制增益将图像信号增强,避免震后环境的高强电磁干扰;再最终通过处理器单元将所有幸存者的位置信号统计汇总并将该区域范围内的地形模拟,规划出合理的救援路线,提高救援效率。
33.需要说明的是,视觉测量单元包括:图像采集模块以及图像处理模块,图像采集模块与红外热成像相机4、标定相机5以及高清相机6信号连接,红外热成像相机4用于检测幸存者位置,标定相机5用于建立标定坐标系并将位置信息标定为坐标信号,高清相机6用于采集幸存者位置范围内500m的图像信息并建立三维模型;图像处理模块与图像采集模块信号连接,用于确定幸存者位置在标定坐标系内的倾斜轴与倾斜角,并调整坐标图像的绝对畸变度,再计算障碍物的图像角点,将图像角点映射到标定坐标系中确定幸存者位置信息范围内的障碍物具体尺寸信息,最终将尺寸信息转换为图像模拟信号。需要说明的是,现有技术的无人机航拍图像的倾斜方向和倾斜角度不尽相同,整体图像有较大程度的扭曲,构建出的三维模型与实际地形存在较大差异,不利于救援,在此技术上,通过视觉测量单元求解出相关的倾斜角度图像数据,能够增加三维模型的准确度。
34.还需要说明的是,视觉测量单元的具体工作原理为:红外热成像相机4检测幸存者位置,标定相机5按照设置的幸存者检测区域构建虚拟标定坐标系,虚拟标定坐标系与标定相机5与高清相机6构建的标定云台以无人机本体2的几何中心基准重合,高清相机6按照预设的图像采集阈值拍摄图像,用标定算法的开源函数把拍摄图像输入开源函数中,输出每个幸存者的主点坐标(u0,v0)、焦距f和x轴与y轴上像素间的实际距离α、β;再计算图像中障碍物角点的坐标;计算幸存者坐标在xy平面上倾斜轴,根据幸存者坐标在标定坐标系中投影点的不同类型确定幸存者坐标在xy平面上投影点的分界点,以两个分界点的中点为样本点,用最小二乘法拟合样本点得到幸存者坐标在xy平面上倾斜轴的斜率k;计算投影点的校正点,在确定投影点的校正点后,根据透视投影原理,把它们都校正到成像介质上,计算幸存者在z轴上的倾斜角;校正大小头图像,用相机的内部参数主点坐标(u0,v0)、焦距f和x轴与y轴上像素间的实际距离α、β,幸存者在xy平面内的倾斜轴的斜率k和在z轴方向的倾斜角θ等参数,把拍摄图像中障碍物的每个角点都反向求解校正点,从而得到其校正图像;最后把所有图像中障碍物的角点坐标映射到标定坐标系上,求出障碍物的实际尺寸。最终实现精确模拟计算幸存者位置周边地形的具体数据。
35.需要说明的是,信号增益单元包括:信号分析模块、信号处理模块以及信号调制模块,信号分析模块与图像处理模块信号连接,用于接收图像模拟信号,并对图像模拟信号进行分析比对;信号处理模块与信号分析模块信号连接,用于根据信号分析模块的分析比对结果进行处理;信号调制模块与信号处理模块信号连接,用于对处理后的图像模拟信号进行调制增益。需要说明的是,由于震后地电场与地磁场的复杂性,对无人机的信号传输能够造成极大干扰,严重影响到图像信息的传输,在此技术上,申请人通过在无人机救援系统内设置信号增益单元来增强图像信号,从而减少地电场、地磁场的复杂变化引起的电磁干扰。
36.还需要说明的是,信号增益单元的具体工作原理为:基于随机共振的基本原理,通过信号分析模块将图像模拟信号进行变量分解,进行包括数字滤波、采样率变换、匹配滤
波、定时修正、频偏修正、相偏修正、频率误差估计和相位误差估计在内的算法进行处理,获得被测信号的基带信号;再根据基带信号进行符号判决和码元映射,得到图像模拟信号的码流信息,通过信号分析模块进行成型滤波生成调制质量分析所需的理想参考信号;信号处理模块接收理想参考信号,并根据理想参考信号对图像模拟信号进行调制,使其满足随机共振增益条件,通过随机共振增益增强图像模拟信号,避免震后复杂环境干扰图像模拟信号的传递。
37.需要说明的是,处理器单元与信号调制模块信号连接,用于统计区域内的所有幸存者图像模拟信号,并将所有幸存者图像模拟信号进行归纳整理,建立带有幸存者图像模拟信号的三维模型并规划飞行路线。还需要说明的是,本技术还能将特定区域范围内的所有幸存者信息进行汇总统计,构建出该区域范围内带有幸存者位置信息、障碍物尺寸信息的三维模型,并且还能规划出合理的飞行救援路线,为救援提供数据理论支持。
38.实施例2:
39.本实施例仅记述区别于实施例1的部分,具体为:防撞罩1的富勒烯结构外部为曲面结构,且对应的位置处开始有通孔,以便于无人机本体2起降过程中的气流通过。
40.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1