一种基于数据驱动的蒸汽-水热交换机事件触发控制方法
1.本发明涉及一种用于蒸汽-水热交换机系统的控制方法,具体涉及一种基于数据驱动的蒸汽-水热交换机系统的事件触发控制方法。
背景技术:
2.蒸汽-水热交换机由于使用场景的复杂性,通常会采用安装简单、扩展性强的网络控制。然而,由于有限的网络带宽,数据包在网络传输中不可避免地存在时延、丢包以及时序错乱等问题。如何在不牺牲理想的稳定性和性能的前提下,同时减少通信传输频率,事件触发控制就显得尤为重要。在事件触发控制环境下,只有当预设的条件被违背时,通信传输才会进行。基于这个思想,研究人员对触发条件的设计展开了大量的研究,并取得一系列成果。
3.然而,上述的研究工作主要集中在蒸汽-水热交换机系统数学模型可建立的情况,并未考虑到没有模型可用该如何控制蒸汽-水热交换机系统。就实际蒸汽-水热交换机而言,由于固有的未建模的动力学特性,很难甚至不可能得到准确的模型。为了脱离系统模型的约束,有必要研究仅利用输入输出数据来设计控制器的方法。
技术实现要素:
4.本发明的目的是提出基于数据驱动的蒸汽-水热交换机系统的事件触发控制方法,可有效解决不能建模的蒸汽-水热交换机系统,在网络环境下带宽有限的问题。
5.本发明的具体技术方案如下:一种基于数据驱动的蒸汽-水热交换机系统的事件触发控制方法,包括以下步骤:
6.使用动态线性化技术,建立蒸汽-水热交换机系统的紧格式数据模型,并基于此数据模型,使用触发时刻的输出或触发间隔的估计输出构造一种输出动态估计方法,进而通过估计的输出来更新伪偏导数和控制输入;
7.设计一种由真实跟踪误差和估计误差构成的输出触发机制来降低通信传输频率;
8.利用基于事件的控制器来控制蒸汽-水热交换机系统。
9.进一步,所述蒸汽-水热交换机系统的离散数学表达式如下所示:yk(t+1)=f(yk(t),...,yk(t-ny),uk(t),...,uk(t-nu))
10.式中,yk(t)∈r
p
表示系统输出,uk(t)∈r
p
表示系统输入,p与系统维度有关,是一个已知的整数,t∈{0,1,...t}表示采样时刻,k∈{1,2....}表示迭代批次,f(
·
)表示未知的非线性函数,ny和nu表示未知的系统阶数。
11.进一步,设计一种由真实跟踪误差和估计误差构成的输出触发机制的具体步骤包括:获取蒸汽
‑ꢀ
水热交换机系统的紧格式数据模型,基于此模型构造出一种由触发时刻的输出或触发间隔的估计输出驱动的输出动态估计方法;使用最优准则函数,使用输入输出数据分别设计出伪偏导数和控制输入uk(t) 的更新算法;求得蒸汽-水热交换机闭环控制系统的李雅普诺夫函数的差分,并要求其负定,从而获得一种由真实跟踪误差和估计
误差构成的输出触发机制。
12.进一步,获取蒸汽-水热交换机系统的紧格式数据模型,基于此模型构造出一种由触发时刻的输出或触发间隔的估计输出驱动的输出动态估计方法;使用最优准则函数,使用输入输出数据分别设计出伪偏导数和控制输入uk(t)的更新算法;求得蒸汽-水热交换机闭环控制系统的李雅普诺夫函数的差分,并要求其负定,推导由真实跟踪误差和估计误差构成的输出触发机制,具体包括:
13.采用动态线性化技术,获取蒸汽-水热交换机系统的紧格式数据模型,如下所示:δyk(t+1)=φk(t)δuk(t)
14.式中,||φk(t)||≤b(b>0)称为伪偏导数,δyk(t+1)=yk(t+1)-y
k-1
(t+1),δuk(t)=uk(t)-u
k-1
(t);
15.定义一个由触发条件决定的事件离散序列{k
l
},l=1,...,在事件触发环境下,基于蒸汽-水热交换机系统的紧格式数据模型,使用触发时刻的输出或触发间隔的估计输出构造出一种输出估计方法,如下所示:
16.和分别表示yk(t+1)和φk(t)的估计值;
17.利用最优准则函数,使用输入输出数据设计伪偏导数的更新算法;选取如下成本函数:
18.解等式得到在触发环境下,伪偏导数的更新算法,如下所示:
19.式中,0<η<1,μ>0是选定的参数,该算法可以保证伪偏导数φk(t)估计误差有界,证明过程如下:
20.c001:由于在触发间隔与上一次触发时刻的更新值相等,因此只需要证明在触发时刻是有界的;
21.c002:定义φk(t)的估计误差在上式的两边同时减去得到下式:
22.c003:由紧格式模型可得因此上式可进一步推导成:
23.c004:因为0<η<1,μ>0,这里存在d1使下式成立:
24.c005:将上式带入c003中的式子可得:
25.c006:上式可进一步递归推导成:
26.c007:随着迭代的进行,即l
→
∞,上式表明观测误差收敛到这个界证明结束;
27.利用最优准则函数,使用输入输出数据设计控制输入uk(t)的更新算法;选取如下成本函数:j(uk(t))=|y
*
(t+1)-yk(t+1)|2+|uk(t)-u
k-1
(t)|228.解等式得到基于事件的控制输入uk(t)更新算法,如下所示:
29.式中,y
*
(t+1)表示要追踪的期望轨迹,ρ>0,λ>0是选定的参数;
30.获取蒸汽-水热交换机闭环控制系统的李雅普诺夫函数,形式如下:vk=ek(t+1)231.式中,ek(t+1)=y
*
(t+1)-yk(t+1)表示追踪误差,在非触发时刻,求取蒸汽-水热交换机闭环控制系统的李雅普诺夫函数的差分,并要求其负定,得到如下输出触发条件:
32.式中,χ(e
etk
(t+1),ek(t+1))=d(e
etk
(t+1))-λek(t+1)e
etk
(t+1),λ=(2(1-ν))/ν,d(e
etk
(t+1))是一个死区函数,如果|ek(t+1)|>be,否则,d(e
etk
(t+1))=0,be是选定的常数,在所设计的输出触发条件下,基于事件的控制器可以保证蒸汽-水热交换机闭环控制系统输出追踪误差有界,证明过程如下:
33.c008:证明分为两步,先证明在触发时刻,蒸汽-水热交换机闭环控制系统输出追踪误差有界,然后再证明在触发间隔时,该系统输出追踪误差也有界;
34.c009:在触发时刻,即k=k
l
,选取如下李雅普诺夫函数:vk=ek(t+1)235.c010:求取李雅普诺夫函数的差分
36.c011:结合紧格式数据模型和控制率的更新算法,闭环控制系统的追踪误差被推导成下式:
37.c012:因为|φk(t)|<b,这里存在0<ρ<1和λ>λ
min
使下式成立:
38.c013:将上式带入c011中的式子里,得到下式:
39.c014:因此,在触发时刻,闭环控制系统的输出追踪误差是有界的;
40.c015:在触发间隔,即k
l
<k<k
l+1
,定义触发误差则追踪误差e
k+1
(t+1) 有如下形式:
41.c016:式中,
42.c017:根据c015中的式子,则在触发间隔时的李雅普诺夫函数可以被推导成:
43.c018:上式可被进一步放缩成:
44.c019:因为φ
k+1
(t)可以由代替,因此则由所设计的输出触发条件可知,在触发间隔时,闭环控制系统的输出追踪误差是有界的。
附图说明
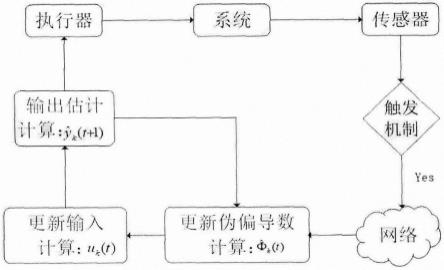
45.图1为本发明实施例的方法流程图;
46.图2为实施例采用本发明所提方法迭代60次的数据传输次数图;
47.图3为实施例采用本发明所提方法和非事件触发方法在第10次迭代的输出追踪图;
48.图4为实施例采用本发明所提方法和非事件触发方法在第20次迭代的输出追踪图;
49.图5为实施例采用本发明所提方法和非事件触发方法在第60次迭代的输出追踪图;
具体实施方式
50.下面结合具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
51.如图1所示,一种基于数据驱动的蒸汽-水热交换机系统的事件触发控制方法,包
含如下步骤:
52.步骤一、设置参数初值;
53.步骤二、更新伪偏导数
54.步骤三、使用更新好的信息,更新控制输入uk(t);
55.步骤四、(1)、利用已知的和uk(t),计算估计的输出并传入触发机制中;(2)、控制输入uk(t)传入蒸汽-水热交换机系统产生实际输出yk(t+1),并传入触发机制中;
56.步骤五、判断触发条件是否成立,若成立则系统实际输出yk(t+1)通过网络传入控制端,否则,估计的输出进入控制端;
57.步骤六、重复步骤二,进入下一循环。
58.下面介绍本发明的一个实施例:考虑蒸汽-水热交换机系统输出追踪控制问题,其对应于hammerstein空间模型为:
[0059][0060]
期望的追踪轨迹为:
[0061][0062]
图1为本发明实施例的方法流程图;应用所提方法,60次迭代的触发时刻之和如图2所示,从中可以看出,在迭代过程中只有14%(3373/24000)被触发;图3、4、5展示所提事件触发方法和非事件触发方法在第10、20、60次迭代下的输出轨迹。从这三张图可以看出,所提方法不仅有效的降低了通信频率,而且在第60次迭代后,可以获得一个满意的跟踪性能。
[0063]
参考文献
[0064]
[1]s.wang,x.jin,s.mao,a.v.vasilakos,y.tang.model-freeevent-triggeredoptimalconsensuscontrolofmultipleeuler-lagrangesystemsviareinforcementlearning.transactionsonnetworkscienceandengineering,vol.8,pp.246-258,2021.
[0064]
[2]z.hou,s.jin.data-drivenmodel-freeadaptivecontrolforaclassofmimononlineardiscrete-timesystems.ieeetransactionsonneuralnetworks,vol.22,pp.2173-2188,2011.
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1