一种基于智能指令预见的航空电动燃油泵容错控制方法
1.本发明属于航空发动机控制领域,具体涉及一种航空电动燃油泵智能鲁棒容错控制系统设计方法。
背景技术:
2.智能化是航空电动燃油泵发展的一个重要前沿方向,通过鲁棒容错控制的思想,结合智能优化算法,设计智能化的控制器,从而实现航空电动燃油泵供油品质的提升和可靠性的增强,是一条非常值得探索的途径。这不仅可以降低电动燃油泵的硬件升级和改造成本,还能够充分挖掘燃油泵的供油潜能,弥补燃油泵使用过程中的性能退化,尽可能地降低故障对整体系统带来的不利影响等。
3.目前,国内外就航空电动燃油泵的智能化控制研究方案尚不多见。首先,从系统控制方案而言,文[1]提出一种基于分布式控制的航空电动燃油泵方案,控制系统的容错性能可以由数字控制器中的双余度电子通道、备份传感器、备份执行机构等保证。文[2]针对发动机的特性,开发出适用于电动燃油泵控制回路pi控制器的根轨迹参数设计方法,进一步提高航空发动机燃油控制回路的鲁棒控制性能。文[3]在电动燃油泵的非线性数学模型的基础上,设计串级pi压力控制器,并通过实验验证控制方法在极端情况下依然具有良好鲁棒性。文[4]提出了一种基于有限集预测的电动燃油泵流量控制系统方案,该控制策略实现了更稳定更快速的电流控制,进一步减小了电机转速波动,从而使燃油泵的流量供给更加平稳精确。其次,针对系统可能出现的各种故障,文[5]以四相容错永磁电机为研究对象,电机的每相之间是具有磁、电、热和机械隔离独立单元,通过相关参数变化检测内部绕组故障,然后通过功率变换器短路故障相的方法处理故障,实现电动燃油泵的容错控制。文[6]开展了鲁棒容错控制研究,确保航空电动燃油泵在具有不确定性及执行机构故障的情况下能够可靠稳定运行。文[7]在滑模控制的基础上,提出一种基于线性积分滑模面和二次积分滑模面相结合鲁棒控制方法,在航空电动燃油泵系统存在不匹配不确定性的情况下依然具有良好的稳定性。此外,信号的采集与处理也是智能化控制过程中需要给予考虑的环节之一,文[8]考虑到飞行员发送燃油需求信号的过程中可能会受到干扰,通过采集受干扰信号并利用平均处理的方式,提高了燃油系统的鲁棒性。
[0004]
本发明针对的是一类六相永磁同步电机直接驱动外啮合齿轮泵结构的航空电动燃油泵,其中,外啮合齿轮泵是工作机,六相永磁同步电机是动力机,泵和电机同轴连接,因此泵的转速与电机的转速一致。直驱式航空电动燃油泵的结构见图1,针对该类航空电动燃油泵,结合智能优化算法,提出了一种新颖的智能鲁棒容错控制系统设计方法,用以快速精准、安全可靠地为航空发动机供油。
[0005]
[1]高毅军,黄金泉,唐世建.基于分布式控制的航空发动机电动燃油泵方案研究[j].燃气涡轮试验与研究,2012,25(s1):36-40.
[0006]
[2]徐建,杨刚,胡文霏.根轨迹法在燃油控制回路pi控制器参数设计中的应用[j].航空发动机,2016,42(04):17-20.
[0007]
[3]nils t,stump p b,thielecke f.a robust pressure controller for a variable speed ac motor pump—application to aircraft hydraulic power packsges[c].proceedings of the bath/asme 2018 symposium on fluid power and motion control,september 12-141,2018,bath,uk,fpmc2018-8868.
[0008]
[4]徐敏.航空电动燃油泵级联预测控制研究[d].南京:南京航空航天大学,2020.
[0009]
[5]mecrow b c,jack a g,atkinson d j,et al.design and testing of a four-phase fault-tolerant permanent-magnet machine for an engine fuel pump[j].ieee transactions on energy conversion,2004,19(4):671-678.
[0010]
[6]丁润泽.航空电动燃油泵滑模容错控制研究[d].南京航空航天大学,2018.
[0011]
[7]ding r,xiao l,jin x.robust control for electric fuel pump with variant nonlinear loads based on a new combined sliding mode surface[j].international journal of control,automation and systems,2019,17(3):716-728.
[0012]
[8]pooja k k,preethi r,sumatha v p,et al.closed loop fuel control of aero engine[j].international journal of advanced research in electronics and communication engineering,2015,4(5):1404-1410.
技术实现要素:
[0013]
本发明的目的是提供一种基于智能指令预见的航空电动燃油泵容错控制方法,保证航空电动燃油泵在全流量范围内,面临多故障和多不确定性的影响时,为航空发动机快速精准、安全可靠地按需供油,齿轮泵转速不超转、电机电流不超限、燃油流量及转速等输出量鲁棒稳定,同时实现高稳态精度、快动态响应、低燃油消耗率、减少二氧化碳排放量等多目标优化。
[0014]
为实现上述目的,本发明采用如下技术方案:
[0015]
一种基于智能指令预见的航空电动燃油泵容错控制方法,包括以下步骤:
[0016]
步骤1,建立全流量范围内航空电动燃油泵含多故障和不确定性的非线性动态模型;
[0017]
步骤2,建立基于组合径向基函数神经网络的航空电动燃油泵智能转速指令逆模型;
[0018]
步骤3,基于变速灰狼多目标优化设计鲁棒容错控制器。
[0019]
所述步骤1包括:
[0020]
步骤11,首先进行航空电动燃油泵燃油流量特性分析:
[0021]
当航空电动燃油泵的电机与泵采用同轴连接时,泵的转速等同于电机转速,对于给定的外啮合齿轮泵,燃油流量q是泵的转速n和容积效率ηv的函数
[0022]
q=η
vqt
ꢀꢀꢀ
(1)
[0023][0024]
其中,q
t
是齿轮泵的理论输出流量,n为泵的转速,b为齿轮厚度,ra为齿顶圆压力角,rc为节圆半径,tj为基节长度;
[0025]
六相永磁同步电机的电压方程由定子相电阻压降和磁链变化率两部分组成,即
[0026][0027]
其中,us=[u
a u
b u
c u
d u
e uf]
t
为定子电压向量,rs=diag[r
s r
s r
s r
s r
s rs]为电阻向量,is=[i
a i
b i
c i
d i
e if]
t
为定子电流向量;ψs表示永磁体磁链;
[0028]
六相永磁同步电机的磁链方程由电枢绕组磁链和永磁体磁链两部分组成,即
[0029]
ψs=l
sis
+ψmꢀꢀꢀ
(4)
[0030]
其中,ls为相电感矩阵,ψm为永磁体磁链;
[0031][0032]
ψm=ψf[cosθ
e cos(θ
e-α) cos(θ
e-2α) cos(θ
e-3α) cos(θ
e-4α) cos(θ
e-5α)]
t
[0033]
其中,l
11
为第一套绕组的自感,l
22
为第二套绕组的自感,m
12
和m
21
为两套绕组之间的互感,ψf为永磁体磁链幅值,θe为转子的电角度,α=2π/3;t表示矩阵的转置;
[0034]
根据机电能量转换原理,磁共能写为
[0035][0036]
因此,六相永磁同步电机的转矩方程为
[0037][0038]
其中,θm为转子机械角位移,
p
为极对数;
[0039]
六相永磁同步电机的运动方程是
[0040][0041]
其中,j为转动惯量,te为电机转矩,t
l
为负载转矩,b为粘滞摩擦系数,ωm为电机的机械角速度;
[0042]
步骤12,构建由多项式函数形式描述的稳态非线性模型和典型工况下动态线性模型相并联的航空电动燃油泵自适应组合非线性动态模型;
[0043]
航空电动燃油泵自适应组合非线性动态模型由三部分组成:非线性稳态模型、自适应动态增益和线性动态模型;
[0044]
在非线性稳态模型的基础上,通过构造自适应动态增益,并用于调整线性动态模型的部分参数,最终获得兼顾稳态精度和动态响应速度的面向控制系统分析与设计研究的航空电动燃油泵自适应组合非线性动态模型;
[0045]
模型的输入量x=[u,d
t
]
t
,其中u为电子控制器给电动燃油泵的控制量,u经功率变换器后形成为输送给电机的电压,d是由飞行高度、飞行马赫数、环境温度、进口压力等外界参数构成的列向量,xs为x对应的稳态输入值,为稳态燃油流量值;模型的输出量其中w
fb
为燃油流量,n为电动燃油泵转速、y3是由燃油温度、燃油压力、进出口压差等除燃油流量和转速以外的可测参数构成的列向量,ys为y对应的稳态输出值;
[0046]
在全流量范围内,根据发动机不同工况下的燃油需求指令构造由自适应动态增益k表征的自适应策略,自主选定大流量或小流量要求下对应的非线性稳态模型和线性
动态模型;
[0047]
组合模型中的自适应动态增益k由两部分构成,即第一部分k0(xs)基于电动燃油泵非线性稳态模型,利用数值微分算法获得;
[0048][0049]
其中,δx为一个极小的输入增量值;第二部分是根据燃油需求指令而设计的动态增益自适应补偿项,用于使得动态增益在对电动燃油泵线性稳态模型进行调整时,更加符合大流量需求和小流量需求下的不同流量特性,从而获得兼顾稳态精度和动态响应速度的在全流量范围内适用的电动燃油泵自适应组合非线性动态模型。
[0050]
所述步骤12构建的航空电动燃油泵自适应组合非线性动态模型为:
[0051][0052]
其中,f(
·
)是描述系统转速的一维动态非线性函数;h1(
·
)是描述系统输出n的一维函数,因为n亦是系统的状态变量,所以在无不确定性和故障情况下,h1(
·
)=n;h2(
·
)是描述系统输出w
fb
的一维非线性函数,h3(
·
)是描述系统除燃油流量和转速之外的可测输出y3的ρ维非线性函数向量,其中ρ是非零正整数;δf(
·
),δh1(
·
),δh2(
·
),δh3(
·
)分别表示f(
·
),h1(
·
),h2(
·
),h3(
·
)对应的不确定性,φ0(t),φ1(t),φ2(t)和φj(t),(j=3,4,...,ρ+2)是发生于电动燃油泵中的多故障的非线性函数描述,γ0(t-t
0f
),γ1(t-t
1f
),γ2(t-t
2f
),γj(t-t
jf
),(j=3,4,...,ρ+2)表示故障作用于系统的发展类型,包括突变故障、渐变故障,t
0f
,t
1f
,t
2f
,t
jf
,(j=3,4,...,ρ+2)表示故障发生的时间;
[0053][0054]
其中,lj》0(j=0,1,...,ρ+2)表示故障的发展类型。
[0055]
所述步骤2包括:
[0056]
步骤21,构建基于组合径向基函数神经网络的智能转速指令逆模型;
[0057]
根据航空电动燃油泵燃油流量稳态历史数据,基于组合径向基函数神经网络(crbfnn),建立智能转速指令逆模型利用该逆模型,能够获得在当前电动燃油泵的实际温度、压力、压差和燃油需求指令下对应的需求转速na;
[0058]
步骤22,转速指令补偿器
[0059]
根据航空发动机燃油需求指令反馈当前航空电动燃油泵的输出燃油流量w
fb
,利用和燃油流量误差δw
fb
,针对电机转动惯量的影响,并考虑燃油流量在起动、慢车、中间、最大和加速/减速这些不同工况下的各自特点,设计燃油泵转速指令调节器,生成转速
指令补偿量δn;
[0060]
通过转速指令补偿量δn对需求转速na进行调节,最终获得全流量范围内航空电动燃油泵转速当前时刻指令n0;
[0061]
步骤23,转速指令多步预见参考轨迹模型
[0062]
通过历史信息存储器,基于转速当前时刻指令n0,设计如式(10)所示的参考轨迹模型,结合电动燃油泵动态特性,选择系统的上升时间为预测时域p,构成多步预见转速指令参考轨迹向量
[0063][0064][0065]
其中,n0(k)表示n0在当前时刻k的值,n0(k
±
i)表示n0在k
±
i,(i=1,2,...,p)时刻的值,αj,为加权系数。
[0066]
所述步骤2中,
[0067]
基于组合径向基函数神经网络(crbfnn)的智能转速指令估计,在前向训练过程中,将稳态燃油量和稳态测量值y
3s
作为输入量,电机稳态转速ns作为输出量,其中下标s表示稳态值;在反向测试过程中,将实际燃油需求指令和测量值y3作为输入量,需求转速na作为输出量;
[0068]
组合径向基函数神经网络(crbfnn)的总体输入输出映射关系如式(14)所示
[0069][0070]
其中,是输入向量;na是输出量;bj是基函数隐含层的第j个中心单元,与x具有相同的维数;h是径向基函数单元数;vj是介于隐含层和输出层的权重系数;φj是第j个基函数的宽度;||
·
||为向量的欧几里得范数;和分别是权重系数。
[0071]
所述步骤3中,
[0072]
多目标优化问题中涉及最小化稳态误差、最短化动态响应时间、最小化燃油消耗率、最小化二氧化碳排放量,约束条件如式(11)所示,包括转速不超限、电机电流不超最大值、燃油压差不超限、燃油温度不超限,
[0073]
[0074]
其中jj(j=1,2,3,4,...)表示性能指标,ωj(j=1,2,3,4,...)表示满足输入约束的滑模面预测终端域,ts表示到达稳态时间,η
sfc
表示燃油消耗率,表示二氧化碳排放量,n
min
和n
max
分别表示转速下限和上限,i
a,b,c,d,e,f
表示六相永磁同步电机的各相电流,i
min
和i
max
分别表示电流下限和上限,t
pump
表示燃油温度,和分别表示燃油温度下限和上限,δp表示燃油压差,δp
min
和δp
max
分别表示燃油压差下限和上限。
[0075]
所述步骤3包括:
[0076]
步骤31,采用相应的离散时间线性化模型作为预测模型;
[0077]
步骤32,在设计非奇异终端滑模面的基础上,根据状态估计误差,研究包含自适应律的滑模切换项,从而构建自适应非奇异终端滑模观测器,用于对多故障进行诊断和信号重构;
[0078]
步骤33,基于变速灰狼优化算法的滚动优化求解
[0079]
利用混沌映射产生初代种群,并将基于粒子群优化算法(pso)的速度分量引入到gwo中,形成变速灰狼优化算法,为鲁棒容错控制器在线求解。
[0080]
所述步骤32包括:
[0081]
步骤321,自适应非奇异终端滑模观测器设计
[0082]
针对第j个可能含有故障的传感器测量信号,设计的滑模观测器形式为
[0083][0084]
其中,表示转速估计值的一阶导数,表示转速估计值,u表示系统的输入,f(
·
)是描述转速估计值预输入的非线性函数,kj表示自适应参数;sj为非奇异终端滑模面参数,υj(
·
)是关于时变自适应参数kj(t)和滑模面参数sj的自适应切换项,为针对第j个传感器测量信号的估计值,fj是可设计参数;
[0085]
非奇异终端滑模面函数设计为
[0086][0087]
其中,为第j个测量值和第j个滑模观测器输出的估计值之差,λj和σj为正奇数且满足1《λj/σj《2;βj是一个常值;
[0088]
时变自适应参数kj(t)的结构如式(17)所示
[0089][0090]
其中,aj为自适应律增益系数;
[0091]
步骤322,多故障诊断策略
[0092]
当有τ个传感器输出参数,对应地设计τ个滑模观测器,即每个观测器观测一个传感器信号,利用第.j.个传感器的测量输出值与第j个观测器的估计值,生成结构化残差ξj,在传感器无故障的情况下,各个观测器的状态估计值都会收敛到系统的真实状态,若第j个传感器发生故障,其余传感器正常,则由第j个观测器得到的状态估计值将会受到含故障信息的传感器的输出信号的影响,因此估计结果会偏离实际情况,应用此法进行多故障信号的诊断;
[0093]
步骤323,信号重构
[0094]
当检测到发生故障时,综合利用无故障的测量信号和航空电动燃油泵模型输出信号,设计非奇异终端滑模面和自适应律,基于滑模观测器,实现故障信号重构,并替代故障信号,用于鲁棒容错控制器设计。
[0095]
有益效果:本发明提出了一种航空电动燃油智能鲁棒容错控制系统设计方法,相比于现有的技术,本发明的优势在于:
[0096]
(1)本发明在给出全流量范围内航空电动燃油泵非线性动态模型建立新方法的基础上,提出基于智能转速指令多步预见的航空电动燃油泵鲁棒容错控制新方法。
[0097]
(2)在转速指令多步预见过程中,将具有良好非线性拟合能力的高斯基函数和具有良好线性拟合能力的立方基函数相结合,构成组合径向基函数神经网络,并用于建立智能转速指令逆模型,获得转速指令主体部分;此外,针对燃油流量在起动、慢车、巡航、最大和加/减速等不同工况下的各自特点,并考虑电机转动惯量的影响,设计合适的燃油泵转速指令调节器,生成转速指令补偿量,对转速指令主体部分进行动态补偿;并进一步利用转速指令当前和历史信息,构建参考轨迹模型,选择预测时域,构成多步预见转速指令参考轨迹向量。
[0098]
(3)在容错控制器的设计过程中,提出新颖的基于变速灰狼多目标优化的鲁棒容错控制器设计方法,保证航空电动燃油泵在全流量范围内、快速精准、安全可靠的为航空发动机按需供油。
附图说明
[0099]
图1为六相永磁同步电机直驱外啮合齿轮泵的航空电动燃油泵结构图;
[0100]
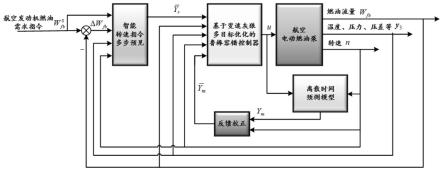
图2为航空电动燃油泵鲁棒容错控制系统设计结构图;
[0101]
图3为六相永磁同步电机的等效物理模型;
[0102]
图4为航空电动燃油泵自适应组合非线性动态模型结构图;
[0103]
图5为智能转速指令多步预见技术框图;
[0104]
图6为各种类型基函数的对应曲线;
[0105]
图7为基于crbfnn的智能转速指令估计;
[0106]
图8为基于变速灰狼多目标优化的鲁棒容错控制器设计原理图;
[0107]
图9为多故障诊断策略原理图;
[0108]
图10为变速灰狼优化算法的流程图;
[0109]
图11为速灰狼优化算法代价函数迭代曲线;
[0110]
图12为动燃油泵流量响应曲线;
[0111]
图13为相永磁同步电机d轴电流和q轴电流响应曲线。
具体实施方式
[0112]
下面结合附图对本发明做更进一步的解释。
[0113]
航空电动燃油泵鲁棒容错控制系统设计结构图如图2所示。从图中可以看出,航空发动机燃油需求指令和电动燃油泵实际输出流量w
fb
以及温度、压力、压差、转速等信号,经智能转速指令多步预见后,形成参考轨迹向量鲁棒容错控制器根据与反馈校正后的
模型预测输出向量基于变速灰狼多目标优化求解,获得电动燃油泵控制量u;非线性离散时间混杂预测模型在控制量u和转速n的作用下,给出模型预测输出向量ym;通过转速n对ym进行反馈校正,构成校正后的模型预测输出向量
[0114]
本发明的一种航空电动燃油智能鲁棒容错控制系统设计方法,包括以下步骤:
[0115]
步骤1,围内航空电动燃油泵非线性动态模型建立
[0116]
航空电动燃油泵控制系统分析与综合研究的重要基础之一是建立合适的控制系统动态模型。针对本发明研究的一体化航空电动燃油泵,其动态建模步骤如下:
[0117]
步骤11,航空电动燃油泵燃油流量特性分析
[0118]
当航空电动燃油泵的电机与泵采用同轴连接时,泵的转速可以等同于电机转速。对于给定的外啮合齿轮泵,燃油流量q是泵的转速n和容积效率ηv的函数。
[0119]
q=η
vqt
ꢀꢀꢀ
(1)
[0120][0121]
其中,q
t
是齿轮泵的理论输出流量,n为泵的转速,b为齿轮厚度,ra为齿顶圆压力角,rc为节圆半径,tj为基节长度。
[0122]
图3给出了六相永磁同步电机的等效物理模型,六相永磁同步电机在自然坐标系下的数学模型,主要包括电压方程、磁链方程、转矩方程以及运动方程。
[0123]
六相永磁同步电机的电压方程由定子相电阻压降和磁链变化率两部分组成,即
[0124][0125]
其中,us=[u
a u
b u
c u
d u
e uf]
t
为定子电压向量,rs=diag[r
s r
s r
s r
s r
s rs]为电阻向量,is=[i
a i
b i
c i
d i
e if]
t
为定子电流向量。
[0126]
六相永磁同步电机的磁链方程由电枢绕组磁链和永磁体磁链两部分组成,即
[0127]
ψs=l
sis
+ψmꢀꢀꢀ
(4)
[0128]
其中,ls为相电感矩阵,ψm为永磁体磁链,具体地,
[0129][0130]
ψm=ψf[cosθ
e cos(θ
e-α) cos(θ
e-2α) cos(θ
e-3α) cos(θ
e-4α) cos(θ
e-5α)]
t
[0131]
其中,l
11
为第一套绕组的自感,l
22
为第二套绕组的自感,m
12
和m
21
为两套绕组之间的互感,ψf为永磁体磁链幅值,θe为转子的电角度,α=2π/3。
[0132]
根据机电能量转换原理,磁共能可写为
[0133][0134]
因此,六相永磁同步电机的转矩方程为
[0135][0136]
其中,θm为转子机械角位移,
p
为极对数。
[0137]
六相永磁同步电机的运动方程是
[0138][0139]
其中,j为转动惯量,te为电机转矩,t
l
为负载转矩,b为粘滞摩擦系数,ωm为电机的机械角速度。
[0140]
步骤12,全流量范围自适应动态建模
[0141]
为了获得在全流量范围内适用的兼顾稳态精度和动态响应要求的航空电动燃油泵动态模型,本发明提出构造由多项式函数形式描述的稳态非线性模型和典型工况下动态线性模型相并联的航空电动燃油泵自适应组合非线性动态模型的建模新方法。航空电动燃油泵自适应组合非线性动态模型的结构图如图4所示。该组合模型由三部分组成:非线性稳态模型、自适应动态增益和线性动态模型。在非线性稳态模型的基础上,通过构造自适应动态增益,并用于调整线性动态模型的部分参数,最终获得兼顾稳态精度和动态响应速度的面向控制系统分析与设计研究的航空电动燃油泵自适应组合非线性动态模型。
[0142]
模型的输入量x=[u,d
t
]
t
,其中u为电子控制器给电动燃油泵的控制量,u经功率变换器后形成为输送给电机的电压,d是由飞行高度、飞行马赫数、环境温度、进口压力等外界参数构成的列向量,xs为x对应的稳态输入值,为稳态燃油流量值;模型的输出量其中w
fb
为燃油流量,n为电动燃油泵转速、y3是由燃油温度、燃油压力、进出口压差等除燃油流量和转速以外的可测参数构成的列向量,ys为y对应的稳态输出值。
[0143]
在全流量范围内,根据发动机不同工况下的燃油需求指令构造由自适应动态增益k表征的自适应策略,自主选定大流量或小流量要求下对应的非线性稳态模型和线性动态模型。
[0144]
组合模型中的自适应动态增益k由两部分构成,即第一部分k0(xs)可基于电动燃油泵非线性稳态模型,利用数值微分算法获得。
[0145][0146]
其中,δx为一个极小的输入增量值。第二部分是根据燃油需求指令而设计的动态增益自适应补偿项,用于使得动态增益在对电动燃油泵线性稳态模型进行调整时,更加符合大流量需求和小流量需求下的不同流量特性,从而获得兼顾稳态精度和动态响应速度的在全流量范围内适用的电动燃油泵自适应组合非线性动态模型。
[0147]
步骤2,智能转速指令多步预见
[0148]
本发明提出如图5所示的智能转速指令多步预见技术,该技术由三个主要模块组成:基于组合径向基函数神经网络的智能转速指令逆模型、转速指令补偿器、转速指令多步预见参考轨迹模型。
[0149]
步骤21,基于组合径向基函数神经网络(crbfnn)的智能转速指令逆模型
[0150]
神经网络已较为广泛地被应用于系统辨识和控制器设计中,因为它具有诸多的优点,比如:可以实现任意非线性映射,同时处理大量不同类型的输入,并能解决输入信息之间的互补性和冗余性问题等。
[0151]
径向基函数神经网络具有单隐层的三层前馈结构,通常用于函数逼近和分类。与bp神经网络相比,径向基函数神经网络学习速度更快。径向基函数神经网络的基函数包括高斯基函数、立方基函数、多重二次和反多重二次基函数。高斯函数的优点是结构简单、曲线光滑和分析性能好。高斯函数在均值附近具有较强的局部拟合能力。
[0152]
本发明采用的基函数是具有良好非线性拟合能力的高斯基函数和具有良好线性拟合能力的立方基函数的结合,称之为组合径向基函数神经网络(crbfnn)。图6展示出了各种类型基函数的对应曲线。
[0153]
本发明根据航空电动燃油泵燃油流量稳态历史数据,基于crbfnn,建立智能转速指令逆模型利用该逆模型,可以获得在当前电动燃油泵的实际温度、压力、压差等参数和燃油需求指令下对应的需求转速na。
[0154]
步骤22,转速指令补偿器
[0155]
航空电动燃油泵对燃油响应速度要求极高,而电机转动惯量却是影响供油响应速度的重要因素,并且在小流量要求下,电机转动惯量对电动燃油泵动态响应的影响,相比于大流量要求下,更为突出,进一步增大了转速与燃油流量对应关系的复杂性。
[0156]
本发明根据航空发动机燃油需求指令反馈当前航空电动燃油泵的输出燃油流量w
fb
,利用和燃油流量误差δw
fb
,针对电机转动惯量的影响,并考虑燃油流量在起动、慢车、中间、最大和加速/减速等不同工况下的各自特点,设计合适的燃油泵转速指令调节器,生成转速指令补偿量δn。
[0157]
通过转速指令补偿量δn对需求转速na进行调节,最终获得全流量范围内航空电动燃油泵转速当前时刻指令n0。
[0158]
步骤23,转速指令多步预见参考轨迹模型
[0159]
充分利用指令信号过去和未来信息,有利于提高航空电动燃油泵的控制品质。因此,本发明通过历史信息存储器,基于转速当前时刻指令n0,设计如式(10)所示的参考轨迹模型,结合电动燃油泵动态特性,选择系统的上升时间为预测时域p,构成多步预见转速指令参考轨迹向量
[0160][0161]
其中n0(k)表示n0在当前时刻k的值,n0(k
±
i)表示n0在k
±
i,(i=1,2,...,p)时刻的值,αj,为加权系数。
[0162]
步骤3,基于变速灰狼多目标优化的鲁棒容错控制器设计
[0163]
如图8所示,借鉴预测控制基本理论,基于变速灰狼多目标优化的鲁棒容错控制器设计技术,由预测模型和反馈校正、多故障诊断与信号重构、滚动优化求解这几个主要模块组成。其中,反馈校正模块的作用是利用转速n,通过设计合适的校正系数向量,对预测模型输出向量ym进行反馈校正,从而构成校正后的模型预测输出向量进一步提高模型预测精度。
[0164]
本发明多目标优化问题中涉及最小化稳态误差、最短化动态响应时间、最小化燃油消耗率、最小化二氧化碳排放量等,约束条件如式(11)所示,包括转速不超限、电机电流
t
1f
),γ2(t-t
2f
),γj(t-t
jf
),(j=3,4,...,ρ+2)表示故障作用于系统的发展类型,包括突变故障、渐变故障,t
0f
,t
1f
,t
2f
,t
jf
,(j=3,4,...,ρ+2)表示故障发生的时间。
[0173][0174]
其中,lj》0(j=0,1,...,ρ+2)表示故障的发展类型。当lj的值很小时,说明系统存在渐变故障;相反,当lj值较大时,则说明系统存在突变故障。
[0175]
(2)基于组合径向基函数神经网络(crbfnn)的航空电动燃油泵智能转速指令逆模型
[0176]
基于crbfnn的智能转速指令估计,如图7所示。在前向训练过程中,将稳态燃油量和稳态测量值y
3s
作为输入量,电机稳态转速ns作为输出量,其中下标s表示稳态值;在反向测试过程中,将实际燃油需求指令和测量值y3作为输入量,需求转速na作为输出量。
[0177]
如图7所示,crbfnn的总体输入输出映射关系如式(14)所示
[0178][0179]
其中,是输入向量;na是输出量;bj是基函数隐含层的第j个中心单元,与x具有相同的维数;h是径向基函数单元数;vj是介于隐含层和输出层的权重系数;φj是第j个基函数的宽度;||
·
||为向量的欧几里得范数;和分别是权重系数。
[0180]
(3)基于变速灰狼多目标优化的鲁棒容错控制器获取
[0181]
(31)建立离散时间预测模型
[0182]
考虑到控制系统对实时性的要求,直接采用全流量范围内航空电动燃油泵非线性动态模型作为多步预测模型,可能导致转速多步预测向量获取太慢,进而影响到鲁棒容错控制器的获取。因此,本发明采用相应的离散时间线性化模型作为预测模型。
[0183]
(32)基于自适应非奇异终端滑模观测器的多故障诊断与信号重构
[0184]
本发明拟在设计非奇异终端滑模面的基础上,根据状态估计误差,研究包含自适应律的滑模切换项,从而构建自适应非奇异终端滑模观测器,用于对多故障进行诊断和信号重构。
[0185]
i)自适应非奇异终端滑模观测器设计
[0186]
针对第j个可能含有故障的传感器测量信号,设计的滑模观测器形式为
[0187][0188]
其中,表示转速估计值的一阶导数,表示转速估计值,u表示系统的输入,f(
·
)是描述转速估计值预输入的非线性函数,kj表示自适应参数;sj为非奇异终端滑模面参数。υj(
·
)是关于时变自适应参数kj(t)和滑模面参数sj的自适应切换项,为针对第j个传感器测量信号的估计值,fj是可设计参数。
[0189]
非奇异终端滑模面函数设计为
[0190][0191]
其中,为第j个测量值和第j个滑模观测器输出的估计值之差,λj和σj为正奇数且满足1《λj/σj《2;βj是一个常值;
[0192]
时变自适应参数kj(t)的结构如式(17)所示
[0193][0194]
其中,aj为自适应律增益系数。
[0195]
ii)多故障诊断策略
[0196]
当有τ个传感器输出参数,对应地设计τ个滑模观测器,即每个观测器观测一个传感器信号。利用第.j.个传感器的测量输出值与第j个观测器的估计值,生成结构化残差ξj。在传感器无故障的情况下,各个观测器的状态估计值都会收敛到系统的真实状态,若第j个传感器发生故障,其余传感器正常,则由第j个观测器得到的状态估计值将会受到含故障信息的传感器的输出信号的影响,因此估计结果会偏离实际情况,应用此法进行多故障信号的诊断。
[0197]
多故障诊断策略原理如图9所示。
[0198]
iii)信号重构途径
[0199]
本发明利用滑模观测器实现对故障信号的重构,当检测到发生故障时,综合利用无故障的测量信号和航空电动燃油泵模型输出信号,设计非奇异终端滑模面和自适应律,基于滑模观测器,实现故障信号重构,并替代故障信号,用于鲁棒容错控制器设计。
[0200]
(33)基于变速灰狼优化算法的滚动优化求解
[0201]
灰狼优化算法(gwo)是s.mirjalili等于2014年提出来的一种基于种群个体相互协调工作的新型群智能优化算法。相较于其他智能算法,gwo在解决函数优化问题中具有更快的收敛速度和更好的寻优能力,不过常规gwo存在随机种群不确定性、易陷入局部最优等不足。本发明拟利用混沌映射产生初代种群,并将基于粒子群优化算法(pso)的速度分量引入到gwo中,形成变速灰狼优化算法,算法流程如图10所示,从而削弱随机种群不确定性、避免陷入局部最优,并进一步提高gwo算法的收敛精度和寻优速度,为鲁棒容错控制器在线求解,提供一种求解精度高、收敛速度快和全局搜索能力强的高效优化求解方法。
[0202]
仿真实验实施及结果分析
[0203]
考虑电机参数和齿轮泵参数如表1和表2所示的航空电动燃油泵。
[0204]
表1 永磁同步电机参数
[0205]
[0206][0207]
表2 齿轮泵参数
[0208][0209]
图11展示了变速灰狼优化算法的适应度函数迭代曲线,适应度函数的值越小说明控制效果越好。结果表明,本发明所提供的变速灰狼优化算法相比于传统的灰狼优化算法具有更加优良的寻优能力。
[0210]
图12展示了航空电动燃油泵的流量响应曲线,可以看出本发明所提供的控制方法能够使电动燃油泵的流量输出较快地跟踪上期望的流量,同时在大范围的流量变化情况下依然具有良好的跟踪性能,稳态精度较高。
[0211]
图13展示了六相永磁同步电机的d轴电流与q轴电流的变化情况,可以看出,d轴电流能够很好地维持在期望值附近;q轴电流能够根据燃油流量需求的变化而变化,同时响应速度较快。
[0212]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1