一种位置姿态独立控制的多旋翼无人机
1.本发明涉及无人机的技术领域,具体涉及一种位置姿态独立控制的多旋翼无人机,采用三臂共轴双桨布局,由机身与机臂组成,每个机臂与机身之间加入倾转机构,并设计了独立的位置控制器和姿态控制器,及对应的控制分配器,可以使无人机以任意姿态沿任意方向飞行,实现了位置与姿态的独立控制,相对于常规的多旋翼无人机而言,具有可以同时跟踪给定位置和姿态的特点和优点。
背景技术:
2.多旋翼无人机因机械结构简单、易操控、机动性较高等优势,被广泛应用于航拍、遥感测绘、低空侦查、灾后救援等领域,近些年来成为了无人机领域的重要研究方向。而随着无人机的应用范围越来越广泛,无人机的性能要求也越来越高。在一些特定场景,例如动平台降落中,无人机需要同时跟踪动给定的位置和姿态,而常规的多旋翼无人机是欠驱动系统,只能产生机体纵向拉力和三轴姿态力矩,用这四个量驱动无人机六自由度的位置、姿态运动,因此无人机的位置与姿态无法独立控制,无法同时跟踪给定的位置和姿态,导致无人机的应用范围受限。
技术实现要素:
3.本发明要解决的技术问题为:针对常规多旋翼无人机是欠驱动系统,只能产生机体纵向拉力和三轴姿态力矩用以驱动无人机六自由度的位置、姿态运动,从而导致无人机的位置与姿态无法独立控制,无法同时跟踪给定的位置和姿态的问题,提出了一种位置姿态独立控制的多旋翼无人机,采用三臂共轴双桨布局,由机身与机臂组成,每个机臂与机身之间加入倾转机构,并设计了独立的位置控制器和姿态控制器,及对应的控制分配器,可以产生机体坐标系下任意方向的力和力矩,使无人机以任意姿态沿任意方向飞行,实现位置与姿态的独立控制,相对于常规的多旋翼无人机而言,具有可以同时跟踪给定位置和姿态的特点和优点。
4.本发明解决上述技术问题所采用的技术方案是:一种位置姿态独立控制的多旋翼无人机,采用三臂共轴双桨布局,由机身与机臂组成,每个机臂与机身之间加入倾转机构,并设计了独立的位置控制器和姿态控制器,及对应的控制分配器。
5.所述的倾转机构由底座、舵机、联轴器组成,舵机与机身通过底座固连,舵机的输出轴与联轴器固连,机臂的一端与联轴器固连,另一端与上下两个电机固连,两个螺旋桨分别固定于两个电机上。舵机通过联轴器驱动机臂绕其自身中心轴倾转。
6.所述的位置控制器和姿态控制器相互独立,位置控制器根据位置期望值与位置实际值的偏差经位置环控制律计算出速度期望值,速度期望值与速度实际值的偏差经速度环控制律计算出拉力期望值,姿态控制器根据姿态期望值与姿态实际值的偏差经角度环控制律计算出角速度期望值,角速度期望值与角速度实际值的偏差经角速度环控制律计算出力矩期望值。
7.位置控制器输出的机体系下三轴拉力期望值和姿态控制器输出的机体系下三轴力矩期望值经过所述的控制分配器得到螺旋桨转速期望值和机臂倾转角期望值。最终实现无人机位置与姿态的独立控制。
8.本发明的基本原理是:倾转机构的舵机通过联轴器驱动机臂绕其自身中心轴倾转,从而使螺旋桨可以输出机体坐标系下任意方向的力和力矩。
9.以无人机的重心为原点建立机体坐标系,x轴指向无人机正前方,y轴指向无人机右方,z轴指向无人机下方。则螺旋桨在机体系下输出的力和力矩可以表示为:
[0010][0011]
其中f
x
,fy,fz是螺旋桨输出的机体系下的力,τ
x
,τy,τz是螺旋桨输出的机体系下的力矩,a,b,c代表三个机臂,是机臂上的螺旋桨转速,每个机臂的上下两个桨转向相反,转速相同,αa,αb,αc是机臂倾转角,k是控制效率矩阵,具体表示为
[0012][0013]
其中l是机臂长度,h是三个机臂中心轴交点和无人机重心之间的距离,重心通常位于三个机臂中心轴交点的正下方,c
t
是螺旋桨转速的平方与拉力之间的比例系数。螺旋桨可以输出机体系下三个坐标轴方向的力f
x
、fy、fz和力矩τ
x
、τy、τz,进而输出机体系下任意方向的力和力矩,使无人机以任意姿态沿任意方向飞行,实现位置与姿态的独立控制。
[0014]
本发明与现有技术相比的优点在于:与常规的多旋翼无人机相比,本发明可以使无人机以任意姿态沿任意方向飞行,实现位置和姿态的独立控制,可以同时跟踪给定的位置和姿态。此外机臂倾转角固定为0度时,无人机可以采用常规无人机的控制方法实现常规无人机的飞行。
附图说明
[0015]
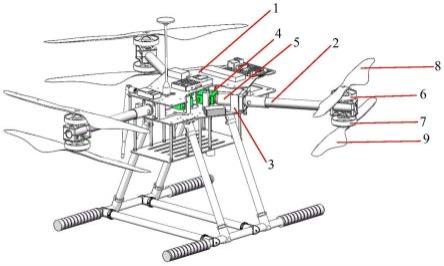
图1为本发明的一种位置姿态独立控制的多旋翼无人机结构图;
[0016]
图2为本发明的一种位置姿态独立控制的多旋翼无人机的倾转机构结构图;
[0017]
图3为本发明的一种位置姿态独立控制的多旋翼无人机的控制系统框图。
具体实施方式
[0018]
如图1所示为无人机的结构图,采用三臂共轴双桨布局,由机身与机臂组成,每个机臂与机身之间加入倾转机构。
[0019]
如图2所示为倾转机构的结构图。倾转机构由底座、舵机、联轴器组成。舵机的输出轴与联轴器固连,机臂的一端与联轴器固连,另一端与上下两个电机固连,两个螺旋桨分别固定于两个电机上。舵机通过联轴器驱动机臂绕其自身中心轴倾转。
[0020]
如图3所示为无人机的控制系统框图,位置控制器和姿态控制器相互独立,位置控制器根据位置期望值pr与位置实际值p的偏差经位置环控制律计算出速度期望值vr,速度期望值vr与速度实际值v的偏差经速度环控制律计算出拉力期望值fr,姿态控制器根据姿态期望值θr与姿态实际值θ的偏差经角度环控制律计算出角速度期望值ωr,角速度期望值ωr与角速度实际值ω的偏差经角速度环控制律计算出力矩期望值τr,位置控制器输出的机体系下三轴拉力期望值fr和姿态控制器输出的机体系下三轴力矩期望值τr经过控制分配器得到螺旋桨转速期望值与机臂倾转角期望值α
ar
,α
br
,α
cr
,表达式如下,
[0021][0022]
其中f
xr
,,f
yr
,,f
zr
是位置控制器输出的机体系下的拉力期望值,τ
xr
,,τ
yr
,,τ
zr
是姿态控制器输出的机体系下的力矩期望值,a,b,c代表三个机臂,是机臂上的螺旋桨转速期望值,每个机臂的上下两个桨转速期望值相同,转向相反,α
ar
,α
br
,α
cr
是机臂倾转角期望值,k-1
是控制分配矩阵,通过对控制效率矩阵k求逆得到,控制效率矩阵k具体表示为
[0023][0024]
其中l是机臂长度,h是三个机臂中心轴交点和无人机重心之间的距离,重心通常位于三个机臂中心轴交点的正下方,c
t
是螺旋桨转速的平方与拉力之间的比例系数。
[0025]
进一步可解出螺旋桨转速期望值与机臂倾转角期望值α
ar
,α
br
,α
cr
,
[0026][0027]
解出的螺旋桨转速期望值通过电机带动螺旋桨旋转实现,机臂倾转角期望值通过倾转机构驱动机臂绕其自身中心轴倾转实现,最终实现无人机位置与姿态的独立控制。
[0028]
此外机臂倾转角固定为0度时,无人机可以采用常规无人机的控制方法实现常规无人机的飞行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1