作业辅助系统的制作方法
1.本发明涉及对使用作业车辆的作业进行辅助的作业辅助系统。
背景技术:
2.作为上述作业辅助系统,例如已知专利文献1所述的作业辅助系统。该作业辅助系统利用表示田地边界线的地图位置的边界线数据,对作业车辆(在专利文献1中为“联合收割机”)的行驶进行控制,以避免超过田地的边界线。另外,在该作业辅助系统中,边界线数据基于田地中该作业车辆的行驶轨迹而生成。
3.现有技术文献
4.专利文献
5.专利文献1:(日本)特开2019-106983号公报
技术实现要素:
6.发明所要解决的技术问题
7.在专利文献1中未针对在多个作业车辆间共享边界线数据的情况进行描述。
8.在此,如专利文献1所述的边界线数据,在可生成表示作业车辆不可越过的边界的外缘地图的作业辅助系统中,在简单构成为在多个作业车辆间共享外缘地图的情况下,设想外缘地图与各作业车辆的特性不匹配,各作业车辆不能有效行驶的情况。
9.例如,根据作业车辆的类型,作业车辆的外形不同。因此,在田地中,作业车辆在位于田地的外缘区域的田埂附近行驶时,根据作业车辆的类型,作业车辆可与田埂接近的程度不同。因此,适当的外缘地图取决于作业车辆的类型。
10.本发明的目的在于提供一种可有效地生成与作业车辆的特性对应的外缘地图的作业辅助系统。
11.用于解决技术问题的技术方案
12.本发明的特征在于,具有:获取部,其获取第一作业车辆正在田地中行驶时位于所述田地的外缘区域的物体的三维位置数据;发送部,其将由所述获取部获取到的所述三维位置数据向可存储所述三维位置数据的管理服务器发送;地图生成部,其通过根据第二作业车辆的特性对所述三维位置数据进行处理,生成表示所述第二作业车辆在所述田地中行驶时所述第二作业车辆不可越过的边界的外缘地图。
13.根据本结构,根据第二作业车辆的特性,由地图生成部生成外缘地图。
14.另外,当在第一作业车辆行驶时获取到三维位置数据时,第二作业车辆不需要为了生成外缘地图而在田地行驶。因此,与第二作业车辆需要为了生成用于第二作业车辆的外缘地图而在田地行驶的结构相比,能够有效地生成外缘地图。
15.因此,根据本结构,能够实现可有效地生成与作业车辆的特性对应的外缘地图的作业辅助系统。
16.此外,基于本发明,所述特性优选为在所述第二作业车辆配置的作业装置的高度。
17.在田地的外缘区域大多设有田埂。通常,田埂越向外侧越高地倾斜。因此,作业车辆在田埂的附近行驶时,作业车辆可与田埂接近的程度取决于作业装置的高度。因此,当根据作业装置的高度生成外缘地图时,外缘地图趋于合适。
18.在此,根据本结构,用于第二作业车辆的外缘地图根据在第二作业车辆配置的作业装置的高度而生成。因此,生成的外缘地图趋于合适。
19.此外,基于本发明,优选具有基于所述外缘地图生成所述第二作业车辆的用于自动行驶的目标行驶路径的路径生成部,所述路径生成部生成所述目标行驶路径,以在所述第二作业车辆沿着所述目标行驶路径自动行驶的情况下,使所述第二作业车辆不会向由所述外缘地图表示的边界的外侧超出。
20.根据本结构,能够生成第二作业车辆不会向由外缘地图表示的边界的外侧超出、可进行作业的目标行驶路径。因此,能够实现可避免第二作业车辆向由外缘地图表示的边界的外侧超出、并且通过自动行驶进行作业行驶的作业辅助系统。
21.此外,基于本发明,优选具有对所述第二作业车辆的行驶进行控制的行驶控制部,所述行驶控制部对所述第二作业车辆的行驶进行控制,以使所述第二作业车辆不会向由所述外缘地图表示的边界的外侧超出。
22.根据本结构,能够避免第二作业车辆在作业行驶中向由外缘地图表示的边界的外侧超出。由此,能够实现避免第二作业车辆向由外缘地图表示的边界的外侧超出、并且可辅助进行作业行驶的作业辅助系统。
23.此外,基于本发明,优选所述地图生成部配置在所述管理服务器。
24.通常,物体的三维位置数据的容量较大。因此,三维位置数据具有比外缘地图大的容量。
25.在此,根据本结构,因为地图生成部配置在管理服务器,所以不需要将具有较大容量的三维位置数据从管理服务器向第二作业车辆传送。另外,当从管理服务器向第二作业车辆传送外缘地图时,可以在第二作业车辆中利用外缘地图。
26.因此,根据本结构,能够实现在第二作业车辆中可利用外缘地图、并且容易使需要从管理服务器向第二作业车辆传送的数据的容量减少的作业辅助系统。
27.此外,基于本发明,优选具有:位置信息获取部,其随时间获取所述第一作业车辆的位置信息;遮蔽区域设定部,其在由所述获取部获取所述三维位置数据期间抽出所述第一作业车辆行驶的行驶轨迹之中与所述田地的外周部最接近的元素的集合体即最外轨迹的元素组的位置信息,将由所述最外轨迹的元素组包围的区域设定为遮蔽区域,并且计算所述遮蔽区域的位置信息;遮蔽部,其进行将在所述遮蔽区域的范围内包含的所述三维位置数据除去的遮蔽处理。所述发送部将所述遮蔽处理后的所述三维位置数据的集合体向所述管理服务器发送。
28.根据本结构,遮蔽处理后的三维位置数据的集合体的容量比遮蔽处理前小。因此,能够实现容易使需要从发送部向管理服务器传送的数据的容量减少的作业辅助系统。
附图说明
29.图1是作业辅助系统的整体图。
30.图2是联合收割机的左侧视图。
31.图3是联合收割机的俯视图。
32.图4是表示第一割取行驶的图。
33.图5是表示第二割取行驶的图。
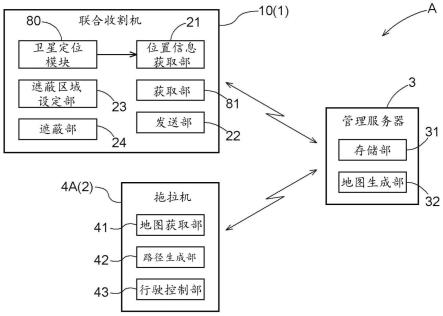
34.图6是表示作业辅助系统的结构的块图。
35.图7是说明遮蔽处理的图。
36.图8是表示外缘地图等的图。
具体实施方式
37.基于附图,针对用于实施本发明的方式进行说明。需要说明的是,在如下的说明中,在未特别说明的情况下,将图2及图3所示的箭头f的方向作为“前”、箭头b的方向作为“后”,将图3所示的箭头l的方向作为“左”、箭头r的方向作为“右”。另外,将图2所示的箭头u的方向作为“上”、箭头d的方向作为“下”。
38.[作业辅助系统的整体结构]
[0039]
如图1所示,作业辅助系统a具有:第一作业车辆1、第二作业车辆2、以及管理服务器3。第一作业车辆1与管理服务器3可相互通信地构成。第二作业车辆2与管理服务器3可相互通信地构成。
[0040]
如图1所示,具体而言,本实施方式的第一作业车辆1为全喂入联合收割机10。另外,具体而言,本实施方式的第二作业车辆2为拖拉机4a以及插秧机4b。
[0041]
然而,本发明不限于此。例如,第一作业车辆1也可以为拖拉机4a,第二作业车辆2也可以为联合收割机10。
[0042]
管理服务器3在位于第一作业车辆1及第二作业车辆2的外部的管理设施(未图示)进行设置。
[0043]
[联合收割机的结构]
[0044]
如图2及图3所示,联合收割机10具有:机体框架9、收割部h,履带式行驶装置11、驾驶部12、脱粒装置13、谷粒箱14、输送部16、谷粒排出装置18、以及卫星定位模块80。
[0045]
行驶装置11在联合收割机10的机体的下部进行配置。另外,行驶装置11由来自发动机(未图示)的动力进行驱动。而且,联合收割机10可利用行驶装置11自行行驶。
[0046]
另外,驾驶部12、脱粒装置13、谷粒箱14配置在行驶装置11的上侧。另外,驾驶部12、脱粒装置13、谷粒箱14支承在机体框架9。驾驶部12可搭乘对联合收割机10的作业进行监控的操作人员。需要说明的是,操作人员也可以从联合收割机10的机外监控联合收割机10的作业。
[0047]
如图2及图3所示,谷粒排出装置18设置在谷粒箱14的上侧。另外,卫星定位模块80安装在驾驶部12的上表面。
[0048]
收割部h配置在机体的前部。而且,输送部16设置在收割部h的后侧。另外,收割部h包括割取装置15以及拨禾轮17。
[0049]
割取装置15割取田地5(参照图4)的植立谷杆。另外,拨禾轮17围绕沿着机体左右方向的拨禾轮轴芯17b进行旋转驱动,并且扒拢收割对象的植立谷杆。将由割取装置15割取到的割取谷杆向输送部16输送。
[0050]
根据该结构,收割部h对田地5的作物进行收割。而且,联合收割机10可以由割取装
置15割取田地5的植立谷杆,并且进行由行驶装置11进行行驶的割取行驶。
[0051]
由收割部h收割到的割取谷杆由输送部16向机体后方输送。由此,将割取谷杆向脱粒装置13输送。
[0052]
在脱粒装置13中,对割取谷杆进行脱粒处理。通过脱粒处理得到的谷粒贮存在谷粒箱14中。在谷粒箱14中贮存的谷粒根据需要,由谷粒排出装置18向机外排出。
[0053]
在此,如图4及图5所示,联合收割机10构成为在位于外缘区域6的内侧的田地5中收割作物。外缘区域6以包围田地5的状态进行设置。如图2及图3所示,外缘区域6例如包括田埂61和给排水泵(未图示)等。田埂61及给排水泵都相当于本发明的“物体”。需要说明的是,在图3中,由斜线的阴影表示田埂61的上表面部。
[0054]
如图4所示,联合收割机10可实施第一割取行驶地构成。第一割取行驶是在田地5的外周区域sa进行的割取行驶。需要说明的是,如图5所示,外周区域sa是位于田地5内的外周部的区域。
[0055]
在本实施方式中,第一割取行驶的圈数为一圈。然而,本发明不限于此,第一割取行驶的圈数也可以为两圈以上的任意圈数。
[0056]
而且,如图5所示,联合收割机10在进行了第一割取行驶后,进行第二割取行驶,由此,可以实施田地5的割取行驶。第二割取行驶是在第一割取行驶之后、在比外周区域sa更靠近内侧的作业对象区域ca进行的割取行驶。
[0057]
在本实施方式中
は
,图4所示的第一割取行驶通过手动行驶来进行。另外,图5所示的第二割取行驶通过自动行驶来进行。然而,本发明不限于此,第一割取行驶也可以通过自动行驶来进行。另外,第二割取行驶也可以通过手动行驶来进行。
[0058]
[关于位置信息的获取]
[0059]
如图6所示,联合收割机10具有位置信息获取部21。另外,如图2所示,卫星定位模块80接收来自在gps(全球定位系统)中使用的人造卫星gs的gps信号。而且,如图6所示,卫星定位模块80基于接收到的gps信号,将表示联合收割机10的位置的定位数据向位置信息获取部21传送。
[0060]
需要说明的是,本发明不限于此。卫星定位模块80也可以不利用gps。例如,卫星定位模块80也可以利用gps以外的gnss(glonass、galileo、准天顶卫星系统、beidou等)。
[0061]
位置信息获取部21基于由卫星定位模块80输出的定位数据,随时间算出联合收割机10的位置坐标(相当于本发明的“位置信息”)。由此,位置信息获取部21随时间获取联合收割机10的位置坐标。
[0062]
这样,作业辅助系统a具有随时间获取第一作业车辆1的位置坐标的位置信息获取部21。
[0063]
[关于获取部]
[0064]
如图2及图3所示,联合收割机10具有获取部81。获取部81将外缘区域6之中、位于联合收割机10的行进方向前方的部分作为检测对象,对在联合收割机10在田地5行驶时位于外缘区域6的物体的三维位置进行检测。由此,获取部81获取位于外缘区域6的物体的三维位置数据。
[0065]
这样,作业辅助系统a具有获取部81,该获取部81获取第一作业车辆1正在田地5行驶时位于田地5的外缘区域6的物体的三维位置数据。
[0066]
详细地说明,则本实施方式的获取部81是tof(time of flight:飞行时间)测量方式的测量装置即二维扫描lidar。需要说明的是,本发明不限于此,获取部81也可以为三维扫描lidar。另外,获取部81的测量方式不限于tof测量方式,也可以为立体匹配测量方式等。
[0067]
获取部81基于tof测量方式的测量结果、以及位置信息获取部21获取到的联合收割机10的位置坐标,将表示在前方区域fa(参照图2)存在的物体的位置及高度的点云数据进行输出。根据该结构,获取部81对联合收割机10正在田地5中行驶时在位于联合收割机10的行进方向前方的区域即前方区域fa存在的物体的位置及高度进行检测。由此,获取部81获取位于外缘区域6的物体的三维位置数据。
[0068]
需要说明的是,本发明不限于此,获取部81只要可获取位于外缘区域6的物体的三维位置数据,可以为任意的结构。
[0069]
获取部81例如获取位于外缘区域6的田埂61的三维位置数据。
[0070]
而且,获取部81对在前方区域fa存在的物体的位置及高度进行检测,并且通过如图4及图5所示联合收割机10在田地5中行驶,获取与外缘区域6的整个周对应的三维位置数据的集合体。
[0071]
[关于遮蔽处理]
[0072]
如图6所示,联合收割机10具有遮蔽区域设定部23及遮蔽部24。下面,针对遮蔽区域设定部23及遮蔽部24进行说明。
[0073]
遮蔽区域设定部23基于位置信息获取部21获取到的联合收割机10的位置坐标,从联合收割机10的行驶轨迹中抽出最外轨迹的元素组的位置信息。最外轨迹的元素组是在由获取部81获取三维位置数据时联合收割机10行驶的行驶轨迹之中与田地5的外周部最接近的元素的集合体。
[0074]
而且,遮蔽区域设定部23将由最外轨迹的元素组包围的区域设定为遮蔽区域(参照图7),并且计算遮蔽区域的位置信息。
[0075]
这样,作业辅助系统a具有遮蔽区域设定部23,该遮蔽区域设定部23在由获取部81获取三维位置数据时抽出第一作业车辆1行驶的行驶轨迹之中与田地5的外周部最接近的元素的集合体即最外轨迹的元素组的位置信息,将由最外轨迹的元素组包围的区域设定为遮蔽区域,并且计算遮蔽区域的位置信息。
[0076]
如图7所示,遮蔽部24进行遮蔽处理。遮蔽处理是从由获取部81获取到的三维位置数据的集合体除去在遮蔽区域的范围内包含的三维位置数据的处理。需要说明的是,进行遮蔽处理的三维位置数据的集合体可以在第一割取行驶的开始时刻至结束时刻之间获取,也可以在第一割取行驶的开始时刻至第二割取行驶的中途之间获取,也可以在第一割取行驶的开始时刻至第二割取行驶的结束时刻之间获取。
[0077]
这样,作业辅助系统a具有进行将在遮蔽区域的范围内包含的三维位置数据除去的遮蔽处理的遮蔽部24。
[0078]
[关于发送部以及存储部]
[0079]
如图6所示,联合收割机10具有发送部22。另外,管理服务器3具有存储部31。
[0080]
发送部22将遮蔽处理后的三维位置数据的集合体向管理服务器3发送。管理服务器3接收到的遮蔽处理后的三维位置数据的集合体存储在存储部31。即,管理服务器3可以
由存储部31存储三维位置数据的集合体。
[0081]
这样,作业辅助系统a具有将由获取部81获取到的三维位置数据向可存储三维位置数据的管理服务器3发送的发送部22。
[0082]
[关于外缘地图]
[0083]
如图6所示,作业辅助系统a具有地图生成部32。地图生成部32配置在管理服务器3。
[0084]
地图生成部32从存储部31接收三维位置数据的集合体。然后,地图生成部32通过根据第二作业车辆2的特性对三维位置数据的集合体进行处理,生成外缘地图mp(参照图8)。外缘地图mp是表示第二作业车辆2在田地5中行驶时第二作业车辆2不可越过的边界的地图。
[0085]
这样,作业辅助系统a具有地图生成部32,该地图生成部32通过根据第二作业车辆2的特性对三维位置数据进行处理,生成表示第二作业车辆2在田地5中行驶时第二作业车辆2不可越过的边界的外缘地图mp。
[0086]
需要说明的是,在本实施方式中,假设第一作业车辆1在田地5中进行作业行驶后,第二作业车辆2在田地5中进行作业行驶。第一作业车辆1进行作业行驶的田地5与第二作业车辆2进行作业行驶的田地5是相同的。另外,从第一作业车辆1完成作业行驶至第二作业车辆2开始作业行驶的时间长度未特别限定。
[0087]
图8表示有第二作业车辆2为拖拉机4a的情况下的外缘地图mp。在该例子中,外缘地图mp包括第一边界线m1及第二边界线m2。第一边界线m1及第二边界线m2都为框状。另外,第二边界线m2包围第一边界线m1。
[0088]
如图8所示,拖拉机4a具有行驶装置44以及耕作装置45(相当于本发明的“作业装置”)。耕作装置45可上下升降地构成。
[0089]
图8表示有第一高度h1。第一高度h1是拖拉机4a正在田地5中行驶时行驶装置44的下端的高度。需要说明的是,第一高度h1与田地5的地面高度相同。
[0090]
第一边界线m1根据第一高度h1而生成。更具体而言,第一边界线m1是在俯视中连接由三维位置数据的集合体之中高度位置为第一高度h1的三维位置数据表示的位置坐标的线。
[0091]
第一边界线m1表示了行驶装置44不可越过的边界。
[0092]
另外,图8表示有第二高度h2。第二高度h2是拖拉机4a正在田地5中行驶时上升姿势的耕作装置45的下端的高度。
[0093]
第二边界线m2根据第二高度h2而生成。更具体而言,第二边界线m2是在俯视中连接由三维位置数据的集合体之中高度位置为第二高度h2的三维位置数据表示的位置坐标的线。
[0094]
第二边界线m2表示了耕作装置45不可越过的边界。
[0095]
即,通过与行驶装置44的下端的高度对应来对三维位置数据的集合体进行处理,生成第一边界线m1。另外,通过与上升姿势的耕作装置45的下端的高度对应来对三维位置数据的集合体进行处理,生成第二边界线m2。
[0096]
这样,具体而言,上述的“第二作业车辆2的特性”为在第二作业车辆2配置的耕作装置45的高度。
[0097]
需要说明的是,本发明不限于此,地图生成部32也可以构成为,通过根据耕作装置45的高度以外的特性,对三维位置数据的集合体进行处理,生成外缘地图mp。例如,地图生成部32也可以构成为,通过根据第二作业车辆2中耕作装置45以外的规定部位的高度对三维位置数据的集合体进行处理,生成外缘地图mp。在该情况下,规定部位的高度相当于上述的“第二作业车辆2的特性”。
[0098]
另外,地图生成部32不但生成对应于拖拉机4a的特性的外缘地图mp,也可以生成对应于联合收割机10的特性的外缘地图mp,也可以生成对应于插秧机4b的特性的外缘地图mp。
[0099]
[关于路径生成部以及行驶控制部]
[0100]
如图6所示,拖拉机4a具有:地图获取部41、路径生成部42、以及行驶控制部43。
[0101]
地图获取部41从管理服务器3获取外缘地图mp。
[0102]
路径生成部42基于地图获取部41获取到的外缘地图mp,生成拖拉机4a的用于自动行驶的目标行驶路径li(参照图8)。
[0103]
路径生成部42生成目标行驶路径li,以在拖拉机4a沿着目标行驶路径li自动行驶的情况下,使拖拉机4a不会向由外缘地图mp表示的边界的外侧超出。更具体而言,路径生成部42生成目标行驶路径li,以在拖拉机4a沿着目标行驶路径li自动行驶的情况下,使行驶装置44不会向第一边界线m1的外侧超出,并且耕作装置45不会向第二边界线m2的外侧超出。
[0104]
这样,作业辅助系统a具有基于外缘地图mp生成拖拉机4a的用于自动行驶的目标行驶路径li的路径生成部42。
[0105]
行驶控制部43对拖拉机4a的行驶进行控制,以使拖拉机4a沿着目标行驶路径li自动行驶。
[0106]
这样,作业辅助系统a具有对拖拉机4a的行驶进行控制的行驶控制部43。
[0107]
另外,行驶控制部43对拖拉机4a的行驶进行控制,以使拖拉机4a不会向由外缘地图mp表示的边界的外侧超出。更具体而言,行驶控制部43对拖拉机4a的行驶进行控制,以使行驶装置44不会向第一边界线m1的外侧超出,并且使耕作装置45不会向第二边界线m2的外侧超出。
[0108]
需要说明的是,上述的由行驶控制部43对行驶的控制可以在拖拉机4a自动行驶时实施,也可以在拖拉机4a手动行驶时实施。例如,行驶控制部43也可以构成为,在拖拉机4a进行手动行驶时试图向由外缘地图mp表示的边界的外侧超出的情况下,使拖拉机4a的行驶速度降低,或者使拖拉机4a停止行驶。
[0109]
根据如上说明的结构,根据第二作业车辆2的特性,由地图生成部32生成外缘地图mp。
[0110]
另外,只要在第一作业车辆1行驶时获取到三维位置数据,则第二作业车辆2不需要为了生成外缘地图mp而在田地5中行驶。因此,与第二作业车辆2需要为了生成用于第二作业车辆2的外缘地图mp而在田地5中行驶的结构相比,能够有效地生成外缘地图mp。
[0111]
因此,根据如上说明的结构,能够实现可有效生成与作业车辆的特性对应的外缘地图mp的作业辅助系统a。
[0112]
[其它实施方式]
[0113]
(1)第一作业车辆1也可以不可自动行驶地构成。
[0114]
(2)第二作业车辆2也可以不可自动行驶地构成。
[0115]
(3)地图生成部32可以配置在第一作业车辆1,也可以配置在第二作业车辆2。
[0116]
(4)也可以不进行遮蔽处理地构成。
[0117]
(5)第一作业车辆1与第二作业车辆2也可以为类型相互相同的作业车辆。例如,第一作业车辆1与第二作业车辆2也可以都是联合收割机10。
[0118]
(6)第一作业车辆1及第二作业车辆2也可以为任意类型的作业车辆。
[0119]
需要说明的是,上述实施方式(包括其它实施方式,下同)所公开的结构在不矛盾的情况下,可以与其它实施方式所公开的结构组合来应用。另外,本说明书中公开的实施方式为例示,本发明的实施方式不限于此,在不脱离本发明的目的的范围内可以适当改变。
[0120]
工业实用性
[0121]
本发明可在对使用作业车辆的作业进行辅助的作业辅助系统中加以利用。
[0122]
附图标记说明
[0123]
1第一作业车辆;2第二作业车辆;3管理服务器;5田地;6外缘区域;21位置信息获取部;22发送部;23遮蔽区域设定部;24遮蔽部;32地图生成部;42路径生成部;43行驶控制部;45耕作装置(作业装置);61田埂(物体);81获取部;a作业辅助系统;li目标行驶路径;mp外缘地图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1