一种水面无人智能平台运动跟踪方法与流程
1.本发明属于无人智能平台智能航行领域,尤其是一种水面无人智能平台运动跟踪方法。
背景技术:
2.水面无人智能平台可实现安全自主航行,并能搭载相关载荷执行诸如巡逻警戒、测量等多种任务的智能平台,因其具有机动性好、适应性强、多功能、部署便捷方便且执行任务时不存在人员伤亡等特点,在民用领域和军事领域都有较多应用。海上巡视与检查、警戒时,需要对特定目标船只进行拍照取证、识别以及执行相关特殊任务,这需要无人智能平台具备靠近目标并持续跟踪的能力。本发明结合无人智能平台的特点研究一种水面无人智能平台运动跟踪方法,并为进一步实现多艇协同奠定基础,在民用和军事探测等方面具有很好的应用前景。
技术实现要素:
3.本发明的目的是在于克服现有技术的不足之处,提供一种水面无人智能平台运动跟踪方法。
4.本发明的上述目的通过如下技术方案来实现:
5.一种水面无人智能平台运动跟踪方法,其特征在于:包括以下步骤:
6.步骤1:获取安全通信距离并划定安全任务区域;
7.步骤2:依据任务要求,确定跟踪目标位置和指定跟踪位置;
8.步骤3:确定快速到达指定跟踪位置方案:采用追踪方案;先分析追踪目标和本无人智能平台的位置关系,然后计算追踪航速和航向;
9.步骤4:依据追踪方案,进行追踪;
10.步骤5:分析追踪目标和本无人智能平台的位置关系,判定追踪阶段,直至达到指定跟踪位置;
11.步骤6:进入跟踪阶段,根据要求的跟踪类型,开始解算跟踪方案;
12.步骤7:在跟踪任务已经完成或者无人智能平台即将驶出安全任务范围的情况下,停止跟踪。
13.进一步的,步骤1中,无人智能平台与岸基(或母船)之间通过电台进行通讯,通过电台架设高度与周围环境确认无人智能平台的作业范围与区域,具体为:在无干扰和遮挡的前提下,保障正常通信的安全通信距离如下公式:
[0014][0015]
其中d表示通信距离(单位为:km),h
t
和hr表示岸基(或母船)上电台天线搭建高度与无人智能平台天线搭建高度(单位为:m);
[0016]
以岸基或母船电台天线所在位置为圆心,d为半径划定最大任务边界,并依据电子海图,获取任务海域的水文信息,结合获得的水文信息,在最大任务边界内去除无法保证无
人智能平台正常航向的区域,划定安全任务区域。
[0017]
进一步的:步骤2中,在无人智能平台上搭载有探测、感知与识别的相关设备与系统,通过该设备与系统,获得探测范围内的航行船只相对本无人智能平台的位置信息;依据任务要求,确定待跟踪目标,并获取目标导航信息;并依据目标位置和跟踪任务目的,结合航速以及船型等基本参数确认需要到达的跟踪位置。
[0018]
更进一步的:步骤2中,探测、感知与识别的相关设备与系统包括导航雷达、激光雷达和光电、视频系统。
[0019]
进一步的:步骤3中,首先以本无人智能平台最大航速向待跟踪目标靠近,并计算到达目标指定位置所需的时间;然后减速追踪,最终到达步骤2的指定跟踪位置,追踪方案如下:
[0020]
设定跟踪任务前本无人智能平台位于p0点,追踪目标位于点q,追踪目标相对于本无人智能平台方位为p
qc
,距离为d0,追踪目标以航向qc、航速vq航行;依据任务要求,要求本无人智能平台在指定时间t内追踪至位置p
t
处,该处相对于目标舷角为qd、距离为d
t
;
[0021]
首先,估算本无人智能平台全速追踪所需时间,为追踪方案提供依据:以最大航速vmax 计算到达目标指定舷角、指定距离的跟踪位置所需的时间;记s=p0p
t
,初始化到达时间t为:
[0022][0023]
其中s是依据指定跟踪位置确定,主要与本无人智能平台的操控性、目标船型以及任务相关要求等有关;
[0024]
之后,当本无人智能平台到达指定位置附近后,结束快速追踪阶段,进入减速追踪阶段,并及时调整本无人智能平台航速、航向,以便最终到达指定跟踪位置。
[0025]
更近一步的:快速追踪阶段结束后,本无人智能平台航向和速度的计算方法如下:
[0026]
在p
t
点处,构建矢量图,进行解析求解:三角形
△
p1p
t
pv,记p1p
t
=v
p
,p
t
pv=vq,p1pv=v
x
,其中v
p
表示追踪速度,该速度取本无人智能平台的最大航速vmax;vq表示目标速度,该速度由本无人智能平台的雷达测量得出;v
x
表示本无人智能平台相对目标的速度,则:
[0027]
θ=180
°‑
(qc+qd+p
qc
)
[0028][0029]
pd=180
°‑
(qc+p
qc-β)
[0030][0031][0032]
γ=p
qc-β-α
[0033]
其中:qc表示目标的航向相对于正北的夹角,qd表示追踪指定位置相对于目标的舷角, p
qc
表示目标现对于本艇的方位角,β表示本无人智能平台追踪航向,pd表示本无人智能平台追踪航向与目标航行方向夹角,α表示到达指定位置后本无人智能平台相对于目标的速度与追踪速度的夹角,γ表示本无人智能平台追踪速度相对于目标的速度与正北的夹
角。
[0034]
进一步的,步骤4中,在追踪过程中,启动本无人智能平台的感知与避碰模块,确保全程航行安全;在执行追踪时,在本无人智能平台即将驶出安全任务范围的情况下,则停止追踪。
[0035]
进一步的,步骤6中,常采用等距跟踪,即本无人智能平台保持与在目标船的某一方位和距离的位置不变,本无人智能平台的航向和航速与目标船保持一致,实现本艇随目标船一起运动。
[0036]
本发明具有的优点和积极效果:
[0037]
本发明水面无人智能平台运动跟踪方法结合无人智能平台自动航向航迹控制和避碰功能,综合考虑任务要求、航行安全以及无人智能平台性能等因素,使无人智能平台基本具备稳定跟踪的能力,提高了无人智能平台执行巡逻、警戒任务的自主性和智能化水平,且对无人智能平台多艇协同以及集群控制有重要参考价值。
附图说明
[0038]
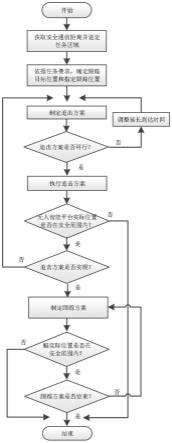
图1是本发明的流程设计图;
[0039]
图2是本发明跟踪控制绘算图;
具体实施方式
[0040]
以下结合附图并通过实施例对本发明的结构作进一步说明。需要说明的是本实施例是叙述性的,而不是限定性的。
[0041]
一种水面无人智能平台运动跟踪方法,请参见图1和2,该运动跟踪方法基于相对运动原理设计追踪控制算法,分析追踪追踪策略。依据国际海事避碰规则,推荐左舷追越目标,制定相关策略:为快速实现跟踪目的,依据避碰策略,首先快速追踪目标抵达指定位置后进行跟踪。结合无人智能平台操控特性,研究不同航速下航向变向稳定时间,航速加减速稳定时间,以此为参考确定减速靠近时机,到达要求位置后,启动跟踪过程,按照跟踪类型要求进行等距跟踪或者环绕跟踪,并保持跟踪状态。
[0042]
本水面无人智能平台运动跟踪方法,包括以下步骤:
[0043]
步骤1:获取安全通信距离并划定任务区域:无人智能平台与岸基(或母船)之间通过电台进行通讯,限定了无人智能平台执行任务的范围与边界,通过电台架设高度与周围环境确认无人智能平台的作业范围与区域。一般通过增加岸基天线的搭建高度来增加通信距离。在无干扰和遮挡的前提下,保障正常通信的安全通信距离可用如下公式估计:
[0044][0045]
其中d表示通信距离(单位为:km),h
t
和hr表示岸基(或母船)上电台天线搭建高度与无人智能平台天线搭建高度(单位为:m)
[0046]
以岸基或母船电台天线所在位置为圆心,d为半径划定最大任务边界,并依据电子海图,获取任务海域的水文信息,结合获得的水文信息,在最大任务边界内去除无法保证无人智能平台正常航向的区域,比如水深不够的区域、锚地区域、存在礁石的区域等,划定安全任务区域,划定的安全任务区域为无人智能平台对跟踪目标进行跟踪的作业区域。
[0047]
例如:选取某海域作为作业区域,在岸边某码头搭建岸基,岸基电台天线高度约为
20米,艇端天线高度约为3米,则最远通信距离为22km。通过电子海图获取水域相关信息,以岸基天线所在位置为圆心,22km为半径划定最大任务边界,综合考虑水深、锚地、礁石等因素,划定安全任务区域。
[0048]
步骤2:依据任务要求,确定跟踪目标位置和指定跟踪位置:无人智能平台可以搭载探测、感知与识别的相关设备与系统,例如导航雷达、激光雷达和光电、视频系统等,通过上述设备与系统,可获得探测范围内的航行船只相对本船的位置等基本信息。依据任务要求,确定待跟踪目标,并获取目标导航信息。并依据目标位置和跟踪任务目的,结合所选执行任务的无人智能平台的船型以及航速等基本参数确认需要到达的跟踪位置。
[0049]
步骤3:确定快速达到指定跟踪位置方案:采用追踪方案,先分析追踪目标和本无人智能平台的位置关系,然后确定追踪航速和航向。本方法采用的追踪方案为:首先以本无人智能平台最大航速向待跟踪目标靠近,并计算到达目标指定位置所需的时间;然后减速追踪,最终到达步骤2的指定跟踪位置。追踪方案如下:
[0050]
如图2所示,跟踪任务前本无人智能平台位于p0点,目标位于点q(相对于本无人智能平台方位为p
qc
,距离为d0),目标以航向qc、航速vq航行,依据任务要求,现要求本无人智能平台在指定时间t内追踪至位置p
t
处(相对于目标舷角qd、距离为d
t
)。
[0051]
首先,估算本无人智能平台全速追踪所需时间,为追踪方案提供依据。以最大航速vmax 计算到达目标指定舷角、指定距离的跟踪位置所需的时间。依据图2:记s=p0p
t
,初始化到达时间t为:
[0052][0053]
其中s是依据指定跟踪位置确定,主要与本无人智能平台的操控性、目标船型以及任务相关要求等有关。
[0054]
其次,当本无人智能平台追踪到指定位置附近后,需快速调整本无人智能平台航速、航向从而精确到达指定跟踪位置。为快速准确到达指定跟踪位置,需要计算上一阶段结束后的本无人智能平台航向和速度,计算方法如下:
[0055]
在p
t
点处,构建矢量图,如图2所示,进行解析求解。
△
p1p
t
pv中记p1p
t
=v
p
,p
t
pv=vq,p1pv=v
x
,其中v
p
表示追踪速度(该速度取本无人智能平台的最大航速vmax;vq表示目标速度,该速度由本无人智能平台的雷达测量得出;v
x
表示本无人智能平台相对目标的速度,则:
[0056]
θ=180
°‑
(qc+qd+p
qc
)
[0057][0058]
pd=180
°‑
(qc+p
qc-β)
[0059][0060]
γ=p
qc-β-α
[0061]
其中:qc表示目标的航向相对于正北的夹角,qd表示追踪指定位置相对于目标的舷角, p
qc
表示目标现对于本无人智能平台的方位角,β表示本无人智能平台追踪航向,pd表示
本无人智能平台追踪航向与目标航行方向夹角,α表示到达指定位置后本无人智能平台相对于目标的速度与追踪速度的夹角,γ表示本无人智能平台追踪速度相对于目标的速度与正北的夹角。
[0062]
例如:以某艇(最高航速25kn,v
p
=25)进行试验,发现目标位于本艇60
°
方向 (p
qc
=60
°
),航速为5kn(vq=5),目标航向330
°
(qc=30
°
)。设定跟踪方位为目标左舷30
°
(q
d0
=30
°
),距离200米(d
t
=200),距离本艇1000米处(s=1000),则可求得:
[0063]
θ=180
°‑
(qc+qd+p
qc
)=60
°
[0064][0065]
pd=180
°‑
(qc+p
qc-β)=100
°
[0066][0067][0068]
γ=p
qc-β-α≈43
°
[0069]
经过上述计算可得,追踪到指定位置附近时,本无人智能平台的航向和航速信息。继续执行步骤4
[0070]
步骤4,依据追踪方案,进行追踪。在追踪过程中,启动本无人智能平台的感知与避碰模块,保证全程航行安全,基于步骤3的策略,解算并执行追踪方案。以无人智能平台当前的航向、航速信息为初始状态,以追踪目标的航向、航速为目标,通过无人智能平台的控制系统完成本无人智能平台的航向、航速控制。执行追踪时,本无人智能平台即将驶出安全任务范围则停止追踪。工程应用中,步骤2中目标位置信息获取以及步骤3中方案解算都以秒为单位进行迭代更新,以便适及时发现并响应目标船的航向和航速变换,保证追踪过程的有效性。
[0071]
步骤5、分析追踪目标和本无人智能平台的位置关系,判定追踪阶段,直至达到指定跟踪位置:实时对比本船和目标船位置,判定是否到达指定追踪位置,如果未到达,则判定追踪方案未实现,继续依据步骤4进行追踪;如果已经到达追踪位置,则判定追踪方案已经实现,则调整当前航向与速度,执行步骤6。另外,在追踪的过程中,在出现本无人智能平台即将驶出安全任务范围的情况,则停止追追踪。
[0072]
步骤6:进入跟踪阶段:本无人智能平台到达指定位置后,根据要求的跟踪类型,开始解算跟踪方案。针对一般的任务,常采用等距跟踪,即:本无人智能平台保持与在目标船的某一方位和距离的位置不变,本无人智能平台的航向和航速与目标船保持一致,本无人智能平台随目标船一起运动。本无人智能平台航向航速控制模块以秒为单位进行迭代计算,以便适及时发现并响应目标船的航向和航速变换,保证跟踪过程的有效性。
[0073]
步骤7:停止跟踪:判断跟踪是否实现或者是否超出安全距离,如果跟踪任务已经完成或者本无人智能平台即将驶出安全任务范围则停止跟踪。
[0074]
尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神范围内,各种替换、变化和修改都是可以的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1