一种光电望远镜调光调焦电机运动控制机箱
1.本发明涉及电机运动控制的技术领域,具体涉及一种光电望远镜调光调焦机构电机运动控制机箱。
背景技术:
2.当前,对于电机运行控制的装置已有很多,但能支持的传感器有限,运动控制不能达到较高的精度,控制运行的电机类型不能更改,同时缺乏适用于光电望远镜调光调焦机构的运动控制机箱。
3.关于运动控制系统的开发平台也很多,但是都需要用户在此基础上进行二次开发,而不能直接使用,且不能接绝对式编码器、温度传感器以及电限位,不能直接用于光电望远镜调光调焦等机构的电机运动控制。本发明适用于光电望远镜调光调焦等机构的电机运动控制,用户可通过机箱上按钮直接对电机进行控制,也可通过上位机发送命令来控制电机运行,不需要二次开发。同时本发明中控制板具有编码器数据处理、限位信号处理、采集温度、控制电机运行、数据存储以及通过rs422串口、can总线通信等功能。使用简单灵活,通过上位机即可改变相关控制参数,需要控制多个机构运行的场合,多台机箱可通过can总线进行组网连接使用。在采用高精度编码器时,闭环控制时能达到微米或角秒级别控制精度。
技术实现要素:
4.本发明的目的在于:提供一种光电望远镜调光调焦电机运动控制机箱,可用于光电望远镜调光调焦等机构的电机运动控制,也可用于工厂、汽车等需要控制小型步进电机或有刷直流电机的场合。可开环对步进电机和有刷直流电机进行控制,同时也适用于在外接编码器时对电机进行高精度闭环运行控制。
5.本发明采用的技术方案为:一种光电望远镜调光调焦电机运动控制机箱,包括:控制板1、传感器输入接口2、显示屏3、上位机接口4、电源5、第一电机驱动器6和第二电机驱动器7,其中,
6.控制机箱内控制板1核心处理器为dsp,传感器输入接口2包括增量式编码器接口、绝对式编码器接口、电限位接口和温度传感器接口,显示屏3显示电机运行状态,上位机接口4为机箱与上位机的通信接口,电源5为整个机箱及外部传感器供电,第一电机驱动器6驱动外部电机运行,第二电机驱动器7驱动外部电机运行;
7.控制板1中外围芯片包括can总线通信芯片、串口通信芯片和电源芯片,与上位机通信接口采用rs422串口或者can总线通信接口,相关配置参数存储采用eeprom芯片,同时根据按钮状态及命令结合传感器状态产生相应的pwm至电机驱动器控制电机运行,并将电机运行状态反馈至上位机及发送至显示屏显示;
8.传感器输入接口2包括增量式编码器、绝对式编码器、电限位、温度传感器ds18b20、按钮开关、旋转变压器;增量式编码器以及绝对式编码器为电机闭环运动时提供
实时位置信息,当无外接编码器时,电机控制为开环运动;电限位为电机运行提供限位信息,当有外接电限位时,电机将在两个电限位范围内运动;当外接温度传感器ds18b20时,机箱显示屏可显示温度传感器测得的温度;机箱可单独通过按钮开关控制电机运行,也可通过上位机发送命令进行电机控制;可通过旋转变压器对电机运行速度进行调节,也可通过上位机发送命令更改电机运行速度。
9.显示屏3与控制板间通信采用rs232通信,显示屏3为非触摸屏时,显示屏仅可显示电机运行状态、编码器位置值、温度值及限位信息;当显示屏3为触摸屏时,也可通过显示屏3对电机运行进行控制。
10.进一步地,上位机接口4为机箱与上位机的通信接口,上位机与机箱的通信接口可以通过rs422串口进行通信,也可以通过can总线进行通信;与上位机通信的接口协议命令帧头为f0开头,f5结尾,总共8个字节,控制板1反馈的协议帧头为fa,帧尾为f5,总共8个字节;rs422波特率默认为115200bps,如果需要使用其他波特率,需要通过上位机发送命令进行更改,重启机箱后新的波特率生效;can总线通信波特率默认为1m bps,如果需要使用其他波特率,需要通过上位机发送命令进行更改,重启机箱后新的波特率生效;控制机箱can总线接收地址为0x300+节点id号,发送地址为0x180+节点id号,其中节点id号可通过控制板卡上拨码开关来配置,节点id号可配置为1~255。
11.进一步地,电源5将ac220v输入转换成dc24v和dc5v电为整个机箱内部板卡、驱动器、显示屏及外接编码器电限位温度传感器供电。
12.进一步地,第一电机驱动器6可为直流电机驱动器或者步进电机驱动器,第二电机驱动器7可为直流电机驱动器或者步进电机驱动器,具体为可根据实际需求进行更改;电机控制类型默认为一个有刷直流电机及一个步进电机,若更改为控制两个步进电机或者两个直流电机,除了相应电机驱动器要进行更改,也需要通过上位机对所控制电机的类型的相关配置进行更改。
13.进一步地,适用于光电望远镜调光调焦机构电机的控制,电机通常为步进电机或者有刷直流电机,但不仅仅适用于光电望远镜调光调焦等机构电机的控制,也适用于具有相同电机控制需求的场合。
14.本发明的原理在于:
15.一种光电望远镜调光调焦电机运动控制机箱,电机运动控制机箱内部包括电源、控制板、直流电机驱动器、步进电机驱动器、显示屏、控制电机运行按钮及电机速度调节旋钮,与外部连接包括电源连接、与上位机通信接口、增量式编码器连线接口、绝对式编码器连线接口以及电限位连线接口。其中增量式编码器连线、绝对式编码器连线以及电限位连线接口中包含直流5v及5v地,可直接为外接增量式编码器、绝对式编码器、电限位供电。
16.本发明可同时控制两路电机,电机类型为步进电机或有刷直流电机,控制电机的最大速度、定位位置等可通过上位机发送命令进行更改,也可通过调速旋钮进行更改。电机运行控制机箱可外接两路增量式编码器及四路电限位,编码器数据及限位信息可在显示屏上显示。上位机可通过rs422串口或者can总线与机箱进行通信。
17.电源为整个电机运行控制机箱供电,将ac220v输入转换成dc24v和dc5v电为整个机箱内部板卡、驱动器、显示屏及外接编码器电限位温度传感器等供电。
18.控制板上采用dsp微处理控制芯片以及其他外围芯片,控制板通过采样调速旋钮
电压值对电机运行速度进行控制,驱动器将控制板产生的pwm波电机控制信号放大后输出至电机。通过上位机发送命令或者按下电机运行控制机箱上不带自锁开关按钮可控制电机运行,不同的按钮按下代表电机往不同的方向运行。电机运行数据在显示屏上实时显示,可显示相关限位信息、当前运行位置值等信息。
19.显示屏与控制板间通过rs232串口进行通信。控制板将需要显示的信息通过rs232串口发送至显示屏进行实时显示。
20.电机运行控制机箱可通过rs422串口或者can总线与上位机相连,上位机可发送相应的协议命令至控制板,控制板收到相应的命令会反馈对应的命令至上位机。rs422波特率默认为115200bps,其他可配置波特率包括9600bps,19200bps,57600bps,115200bps,230400bps,460800bps,921600bps。can总线波特率默认为1m bps,其他可配置波特率包括20k bps,50k bps,100k bps,250k bps,500k bps,800k bps。如果需要更改波特率,需要通过上位机发送命令至控制板卡进行相关配置更改,更改后重启机箱生效。控制机箱can总线接收地址为0x300+节点id号,发送地址为0x180+节点id号,其中节点id号可通过控制板卡上拨码开关来配置,节点id号可配置为1~255。
21.当电机运行控制机箱外接电限位时,电机运行到限位位置时,电机将停止转动,同时显示屏上提示限位信息。限位信号高电平有效或低电平有效可通过限位信号选择按钮进行更改。
22.当外接增量式编码器或者绝对式编码器时,控制板将对编码器信号进行处理,如果外接增量式编码器首先需要按归零按键归零,电机将运行至零位位置值,之后电机运行时显示屏将实时显示正确编码器值。增量式编码器归零正确后可通过显示屏或者上位机rs422串口发送定位命令至控制板,电机将运行至指定位置处。而当外接绝对式编码器时,则不需要进行归零操作,可以直接对电机进行闭环控制。其中电机位置闭环采用模糊控制算法,简单有效,其中最大允许误差、电机运行最大速度、减速区等用户可通过具体控制要求使用上位机发送rs422串口命令进行修改。
23.为防止由于机械卡滞或者电限位与电机运行方向不匹配而导致不能正确归零或者定位的情况,控制板中设定了超时保护,即电机运行一段时间后还未完成归零或运行至指定位置,控制板将控制电机停止运行,同时反馈运行超时,用户可自行设定超时时间。为保护运行机构,机构还可设置超速保护及位置误差发散保护,用户可以自己设定超速保护的最大速度。
24.本发明与现有技术相比的优点在于:
25.(1)本发明支持多种传感器,包括增量式编码器、绝对式编码器、电限位、温度传感器等。
26.(2)本发明使用方式灵活:1、可通过机箱上按钮直接对电机控制,也可以通过上位机控制。2、在无位置传感器时对电机进行开环控制,在有位置传感器时可实现高精度闭环控制,配置参数可根据实际控制机构特性进行更改。3、含有多种运行保护机制,如运行超时保护、超速保护、位置误差发散保护,可根据需求对超时时间、超速保护及位置误差发散值进行更改。
27.(3)本发明当有多个控制机构需要控制时,可上位机软件对多个控制机箱进行组网控制。控制机箱之间可以通过can总线组网使用,机箱之间仅需连接canh、canl两根线即
可组网,can地址通过控制板卡拨码开关配置,连线方式简洁,可靠性强。
附图说明
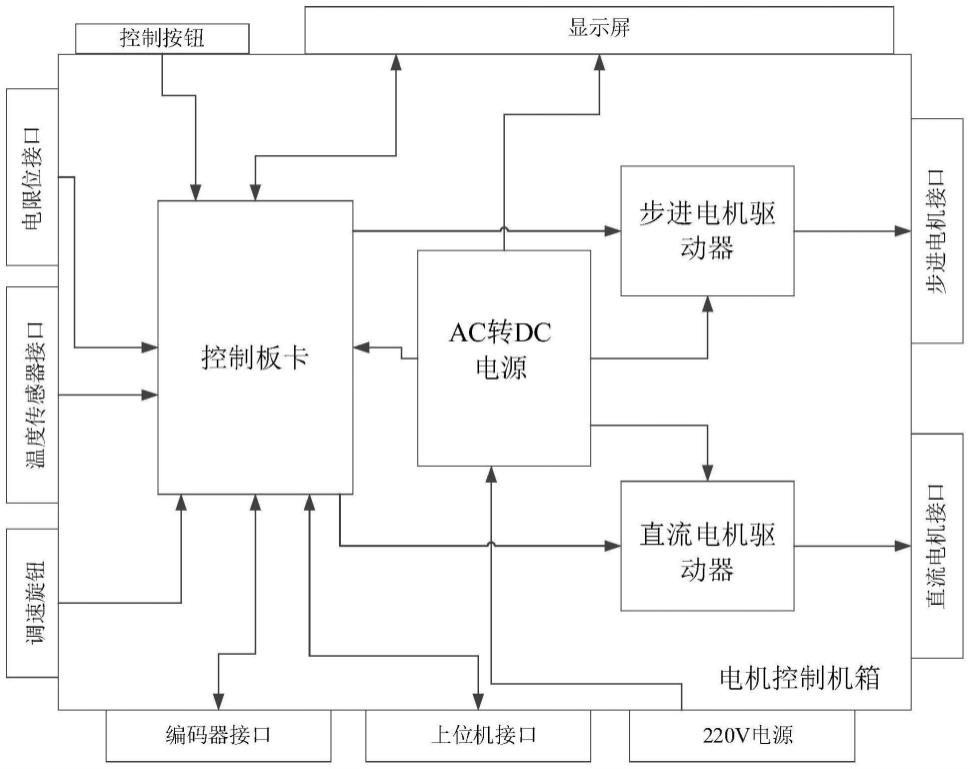
28.图1为本发明一种光电望远镜调光调焦电机运动控制机箱内部组成及外围接口示意图。
29.图2为本发明一种光电望远镜调光调焦电机运动控制机箱正面示意图。
30.图3为本发明一种光电望远镜调光调焦电机运动控制机箱背面示意图。
31.图4为上位机界面。
32.图5为本发明一种光电望远镜调光调焦电机运动控制机箱原理框图。
33.图6为光电望远镜调光调焦电机运动控制机箱运行流程。
34.图中,1为控制板,2为传感器输入接口,3为显示屏,4为上位机接口,5为电源,6为第一电机驱动器,7为第二电机驱动器。
具体实施方式
35.下面结合附图以及具体实施方式进一步说明本发明。
36.如图1所示,本发明一种光电望远镜调光调焦电机运动控制机箱,电机控制机箱内部包括两个电源,交流220v转直流24v电源、交流220v转直流5v电源。5v电源供控制板卡、显示屏使用,24v电源供步进电机驱动器、直流电机驱动器使用。控制板卡为整个控制机箱的核心,完成编码器数据采集、限位信号采集、温度信号采集、控制按钮信号采集、调速旋钮信号采集以及与上位机通信,根据按钮信号或者上位机发送的命令产生相应的pwm信号输出至电机驱动器,步进电机驱动器和直流电机驱动器将pwm信号放大输出至电机,控制电机运行,同时将对应的电机实时运行状态发送至显示屏上显示。
37.通过机箱控制电机运行时,机箱上按键、旋钮如图2所示,步进电机控制包括限位信号选择,可选择高电平限位或者低电平限位,若选择高电平限位,则当限位信号为高电平时有效,电机停止运行,显示屏界面上显示相应限位信息,反之亦然。当按下步进电机+按键时,若+方向未限位,步进电机将往+方向运行,同理当按下步进电机-按键时,若-方向未限位,步进电机将往-方向运行,按键为自复位按键,按键开关弹起时电机将停止运行。如果要对步进电机的速度进行更改,可通过调速旋钮对步进电机速度进行更改。直流电机控制跟步进电机控制相同,直流电机控制包括限位信号选择,可选择高电平限位或者低电平限位,若选择高电平限位,则当限位信号为高电平时有效,电机停止运行,显示屏界面上显示相应限位信息,反之亦然。当按下直流电机+按键时,若+方向未限位,直流电机将往+方向运行,同理当按下直流电机-按键时,若-方向未限位,直流电机将往-方向运行,按键为自复位按键,按键开关弹起时电机将停止运行。如果要对直流电机的速度进行更改,可通过调速旋钮对直流电机速度进行更改。
38.机箱上与外部接线接口如图3所示,包括电源开关、ac220电源输入、串口通信接口、绝对式编码器接口、增量式编码器接口、以及电机及电限位接口。电源开关可对整个机箱的电源进行控制,ac220电源输入为整个机箱提供ac220v电源供电。绝对式和增量式编码器接口将外部绝对式和增量式编码器与控制板卡相连接,板卡可为编码器供电同时读取编码器值,通过编码器值可对电机进行闭环控制。增量式编码器和绝对式编码器不可同时使
用,机箱默认使用增量式编码器,若要使用绝对式编码器,需要通过上位机对控制板卡编码器类型参数进行配置后才能使用。使用增量式编码器时,需要进行归零操作,默认的编码器初始零位位置为-限位位置处。
39.通过上位机控制电机运行时,上位机控制电机运行界面如图4所示,对电机的控制操作包括大步长运行、小步长运行、自定义步长运行以及定位命令。大步长运行、小步长运行、自定义步长运行为开环控制,当点击+时,电机往+方向运行,当点击-时,电机往-方向运行。定位则为位置闭环控制。上位机界面可实时显示位置信息,当使用定位时,实时显示位置误差等信息,运行相关位置信息等可以实时曲线显示,同时可以将相关数据保存。界面右侧可发送原始命令,并显示反馈信息。控制板卡上有eeprom芯片用于存储电机运行相关参数,机箱上电初始化时,控制板卡dsp将读取eeprom芯片内相关配置参数,如大步步长值、小步步长值、最大运行速度、定位减速区、定位门限、超时时间等为可配置参数,配置参数可通过上位机软件右边界面按协议发送相关命令至控制机箱进行参数修改,断电重启后新的配置参数生效。
40.本发明一种光电望远镜调光调焦电机运动控制机箱原理框图如图5所示,具体控制流程如图6所示。机箱加电后板卡从eeprom读取相关参数,完成初始化后,开始进入工作模式,当按动机箱电机运行的按钮或收到上位机发送的运行命令时,程序将做出相关响应,控制电机运行,运行结束后继续等待。
41.如图5所示,本发明一种光电望远镜调光调焦电机运动控制机箱,包括:控制板1、传感器输入接口2、显示屏3、上位机接口4、电源5、第一电机驱动器6和第二电机驱动器7,其中,
42.控制机箱内控制板1核心处理器为dsp(型号tms320f28379d),传感器输入接口2包括增量式编码器接口、绝对式编码器接口、电限位接口和温度传感器接口,显示屏3显示电机运行状态,上位机接口4为机箱与上位机的通信接口,电源5为整个机箱及外部传感器供电,电机驱动器6驱动外部电机运行,电机驱动器7驱动外部电机运行;
43.控制板1中外围芯片包括can总线通信芯片(型号sn65hvd234dr)、串口通信芯片(型号sp3490en)和电源芯片(型号tps82130silr),与上位机通信接口采用rs422串口或者can总线通信接口,相关配置参数存储采用eeprom芯片(型号cat93c86si),同时根据按钮状态及命令结合传感器状态产生相应的pwm至电机驱动器控制电机运行,并将电机运行状态反馈至上位机及发送至显示屏显示;
44.传感器输入接口2包括增量式编码器、绝对式编码器、电限位、温度传感器ds18b20、按钮开关、旋转变压器等。增量式编码器以及绝对式编码器为电机闭环运动时提供实时位置信息,当无外接编码器时,电机控制为开环运动;电限位为电机运行提供限位信息,当有外接电限位时,电机将在两个电限位范围内运动;当外接温度传感器ds18b20时,机箱显示屏可显示温度传感器测得的温度;机箱可单独通过按钮开关控制电机运行,也可通过上位机发送命令进行电机控制;可通过旋转变压器对电机运行速度进行调节,也可通过上位机发送命令更改电机运行速度。
45.显示屏3与控制板间通信采用rs232通信,显示屏3为非触摸屏时,显示屏仅可显示电机运行状态、编码器位置值、温度值及限位信息;当显示屏3为触摸屏时,也可通过显示屏3对电机运行进行控制。
46.上位机接口4为机箱与上位机的通信接口,上位机与机箱的通信接口可以通过rs422串口进行通信,也可以通过can总线进行通信;与上位机通信的接口协议命令帧头为f0开头,f5结尾,总共8个字节,控制板1反馈的协议帧头为fa,帧尾为f5,总共8个字节;rs422波特率默认为115200bps,如果需要使用其他波特率,需要通过上位机发送命令进行更改,重启机箱后新的波特率生效;can总线通信波特率默认为1m bps,如果需要使用其他波特率,需要通过上位机发送命令进行更改,重启机箱后新的波特率生效。控制机箱can总线接收地址为0x300+节点id号,发送地址为0x180+节点id号,其中节点id号可通过控制板卡上拨码开关来配置,节点id号可配置为1~256。
47.电源5将ac220v输入转换成dc24v和dc5v电为整个机箱内部板卡、驱动器、显示屏及外接编码器电限位温度传感器供电。
48.第一电机驱动器6可为直流电机驱动器或者步进电机驱动器,第二电机驱动器7可为直流电机驱动器或者步进电机驱动器,具体为可根据实际需求进行更改;电机控制类型默认为一个有刷直流电机及一个步进电机,若更改为控制两个步进电机或者两个直流电机,除了相应电机驱动器要进行更改,也需要通过上位机对所控制电机的类型的相关配置进行更改。
49.适用于光电望远镜调光调焦机构电机的控制,电机通常为步进电机或者有刷直流电机,但不仅仅适用于光电望远镜调光调焦等机构电机的控制,也适用于具有相同电机控制需求的场合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1