一种建筑空间无人机群任务规划方法与流程
1.本发明一种建筑空间无人机群任务规划方法属于无人机任务规划领域,具体涉及一种面向建筑空间协同任务执行的无人机群任务规划方法。
背景技术:
2.随着社会的不断发展,城市化进程也越来越快,城市建筑空间已经成为消防、应急、反恐、作战等军民活动的典型场景之一。与野外环境相比,城市中建筑繁多、结构复杂,极易阻挡城市建筑空间任务执行人员的视线;同时,建筑物内部空间狭小、通行区域未知,很难在执行任务时快速熟悉环境,从而提升任务执行效率;此外,建筑物存在大量电网、管网等危险因素,极大增加了城市建筑空间的任务执行人员风险。
3.无人机作为空中移动平台,具有体积小、成本低和机动性强等特点,不但方便地到达人员难以抵达的建筑空间区域,而且可以搭载各类传感器,满足对于不同物理信息的探测需求。如通过搭载红外等传感器,可以对建筑物内隐藏的人员进行搜索;搭载声光等传感器,可以获取建筑物的内部结构和管网信息。同时,由于单架无人机受到自身探测能力和机动性的限制,通常通过多架无人机的协同探测方式,利用无人机的个体自主和集群协同能力,不但可减少人的参与,降低潜在威胁,而且可提高探测的实时性和精确度。然而,如何组织多架无人机,甚至多架不同性能的无人机共同协作完成建筑空间特定任务是重要前提。多无人机协同任务规划属于多无人机协同控制中的任务分配和资源调度问题,主要研究在满足无人机性能约束以及目标执行需求条件下,规划无人机群资源中合适的无人机对合适的目标使用合适的载荷在合适的时间执行相应任务,并针对不同无人机采取相应的航路规划方法,提高多机协同任务规划的整体性能。为此需要对多机执行建筑空间任务进行任务规划,通过相应的算法得出满意的结果,使得多架无人机执行各自任务,最终完成整个无人机群任务。
4.在任务分配方面,目前的主要研究思路是将问题转化为经典的模型。例如,动态网络流优化(dnfo)模型,多旅行商问题(mtsp)模型以及车辆路径问题(vrp)模型等。在航线规划方面,通常考虑无人机平台飞行性能约束、环境约束、任务协同约束等条件,在确保每架无人机安全的前提下,为每架无人机规划出完成相应任务的可行飞行航迹,使其对应的性能指标下达到最优或较优,如概率路标图法、栅格法、可视图法、voronoi图法等。然而,这些方法通常应用在空间结构简单、趋于扁平化的场景,对于建筑空间这类室内外结合、空间狭小、行动路线严重受限的场景难以适用。
技术实现要素:
5.本发明为解决建筑空间这类室内外结合、空间狭小、行动路线严重受限场景下的无人机群任务规划问题,提出了一种建筑空间无人机群任务规划方法。
6.本发明采用的技术方案为:
7.一种建筑空间无人机群任务规划方法,包括以下步骤:
8.步骤1:根据建筑空间的特定属性,将空间属性划分建筑外、建筑内和房间内三个层次;并将待规划任务分解为三个层次,分别为建筑外任务层、建筑内任务层和房间内任务层;
9.步骤2:针对建筑外部的空间,利用navmesh法进行栅格化处理,表征为navmesh栅格;针对建筑内空间,首先利用navmesh法进行栅格化处理,将走廊和大厅视作为可通行区域,将房间视作为任务点,出入口视作为连接两个任务点的边,并为每个点和边赋予相应的权,得到带权联通拓扑结构图;针对房间内,表征为具有入口及出口的封闭空间包围盒;
10.步骤3:针对建筑外空间,以无人机群每个个体所在位置为起点,目标建筑的多入口位置为终点,对无人机进行任务分配,形成无人机群中每个个体与特定入口的分配关系;针对建筑内空间,以建筑外空间任务分配终点为建筑内空间任务分配起点,以步骤2中生成的房间任务点为建筑内空间任务分配目标,规划每个无人机所对应的房间任务点;针对房间内,直接定义为最小颗粒度的任务;其中,每个无人机可对应多个房间任务点;
11.步骤4:基于步骤2构建的建筑外空间navmesh栅格以及步骤3生成的建筑外空间任务分配结果,采用带时间窗的a*算法生成建筑外空间无人机群协同飞行航线;基于步骤2构建的建筑内空间带权联通拓扑结构图以及步骤3生成的建筑内空间任务分配结果,采用随机搜索树方法生成建筑内空间无人机群协同飞行航线,并对航线进行时间戳规划,规避机间碰撞风险;针对每个房间内,以步骤2构建的房间内封闭空间包围盒入口为起点,以出口为终点,以遍历路径生成算法生成房间内单机飞行航线;
12.步骤5:将步骤4中每架无人机的建筑外空间、建筑内空间和房间内规划的飞行航线进行融合,生成每个无人机面向整个建筑空间任务的独立航线,任务规划完毕。
13.其中,步骤3中针对建筑外空间,以无人机群每个个体所在位置为起点,目标建筑的多入口位置为终点,对无人机进行任务分配,形成无人机群中每个个体与特定入口的分配关系,具体包括以下过程:
14.针对建筑外空间,设共有n架无人机执行任务,以n架无人机当前所在位置pi为起点,目标建筑的m个入口位置pj为终点,对无人机进行任务分配,利用遗传算法迭代计算最优的无人机分配方案i,即为每个无人机pi分配合适入口pj,使分配方案中每个无人机与所分配目标之间的车比雪夫距离之和最小化,即形成无人机群中每个个体与特定入口的映射关系i:pi→
pj,i=1,2,
…
,n,j∈[1,m],表示每个无人机均有与之对应的入口;其中,n≥1,1≤i≤n,m≥1,1≤j≤m,i
i,j
为搜索方案集合。
[0015]
其中,步骤3中针对建筑内空间,以建筑外空间任务分配终点为建筑内空间任务分配起点,以步骤2中生成的房间任务点为建筑内空间任务分配目标,规划每个无人机所对应的房间任务点,具体包括以下过程:
[0016]
根据步骤2构建的带权联通拓扑结构图,拓扑图中的点表示待分配的房间,设房间数为y,每个房间入口位置表示为py,边表示可通行的建筑内路线,权表示对应路线的时间代价,基于以上信息,在建筑外任务分配结果的基础上进行建筑内任务分配,即采用prim算法或bellman-fold算法确定每架无人机的搜索任务分配方案q,包括需要搜索房间及路线,使分配方案中每个无人机与所分配房间之间的最长时间代价t
i,y
最小,即形成无人机群中每个个体与特定房间入口的映射关系q:pi→
py,i∈[1,n];y=1,2,
…
,y,表示每
个房间均有与之对应的无人机;其中,1≤y≤y,1≤i≤n,q
i,y
为分配方案集合。
[0017]
本发明相比现有技术具有如下优点:
[0018]
本发明方法速度快、效率高,对建筑空间这类层次化特征明显的场景具有很强的适用性。
附图说明
[0019]
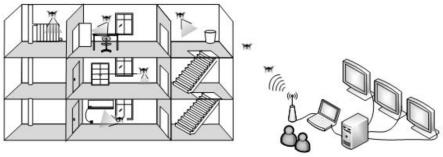
图1为本发明无人机群建筑空间协同搜索示意图。
[0020]
图2为本发明建筑空间无人机群任务规划方法流程图。
具体实施方式
[0021]
下面结合附图对本发明作进一步解释说明。
[0022]
本实施过程的执行需建立在以下前提条件下:1)已知任务执行区域的建筑分布信息,已知目标建筑的内部结构以及门窗位置及尺寸信息,房间大小已知但内部情况可以未知;2)无人机整个飞行过程可以被精确控制,实时位置可以精确获取,并具备室内外良好的通信能力;3)无人机的续航时间远大于实际飞行时间,不必将无人机任务执行过程中失联、坠毁、失控、亏电等意外因素纳入考虑范围;4)本实施方式以无人机群协同搜索场景进行说明,如图1所示,即对建筑内部每个房间进行遍历搜索,该场景的示例说明并不限制该发明在其他任务场景中的应用。
[0023]
整个实施方案流程如图2所示,为了完成建筑内部各房间搜索任务,根据建筑空间的层次划分拟将任务也分解为三个层次,分别对建筑外、建筑内、房间内。在每个层次都需要设计对应的任务分配与航线规划算法。建筑外任务层根据已知建筑外地图中的目标大楼入口生成最优无人机分配方案,并对每架无人机进行合理的航线规划;建筑内任务层根据建筑内地图生成的带权拓扑图确定无人机分配方案,并利用路径规划算法对各个无人机进行航线规划;房间内任务层要求无人机根据相应遍历搜索算法对房间内部进行航线规划。
[0024]
一种建筑空间无人机群任务规划方法,其具体实施过程如下:
[0025]
步骤1:面向任务的建筑空间层次化拆分
[0026]
根据建筑空间的特定属性,将其空间属性划分建筑外、建筑内和房间内三个层次;相应地,将任务也分解为三个层次,分别为建筑外任务层、建筑内任务层和房间内任务层。
[0027]
步骤2:针对层次化建筑空间的地图表征
[0028]
针对建筑外部较为宽阔的空间,利用navmesh法进行栅格化处理,表征为navmesh栅格(参考文献:李桥,“基于navmesh自动寻路算法在动态寻路问题上的研究”,华中科技大学,2019);针对建筑内空间,首先利用navmesh法进行栅格化处理,将走廊、大厅视作为可通行区域,将房间视作为任务点,可通过可通行区域骨架提取或voronoi图分割方法进一步表征为联通拓扑结构图,可将门窗等出入口表征为连接房间任务点的边,对联通拓扑结构图中每个任务点和边赋予相应的权,得到带权联通拓扑结构图,任务点的权值可房间的面积决定,边的权值由边的长度决定;如果房间的面积未知,则根据建筑物外部结构信息进行推测或直接进行均匀权值分配;针对房间内,表征为具有入口及出口的封闭空间包围盒,作为最小颗粒度的建筑内空间。
[0029]
步骤3:基于建筑空间层次化地图表征的任务分配
[0030]
针对建筑外空间,设共有n(n≥1)架无人机执行任务,以n架无人机当前所在位置pi(1≤i≤n)为起点,目标建筑的m个(m≥1)入口位置pj(1≤j≤m)为终点,对无人机进行任务分配,利用遗传算法迭代计算最优的无人机分配方案i,即为每个无人机pi分配合适入口pj,使分配方案中每个无人机与所分配目标之间的车比雪夫距离之和最小化,即其中i
i,j
为搜索方案集合。经过该过程,形成无人机群中每个个体与特定入口的映射关系i:pi→
pj(i=1,2,
…
,n;j∈[1,m]),表示每个无人机均有与之对应的入口。
[0031]
根据步骤2构建的带权联通拓扑图,拓扑图中的点表示待分配的房间,设房间数为y,每个房间入口位置表示为py,边表示可通行的建筑内路线,权表示该路线的时间代价,基于以上信息,在建筑外任务分配结果的基础上进行建筑内任务分配,即采用prim算法或bellman-fold算法确定每架无人机的搜索任务(需要搜索房间及路线)分配方案q,使分配方案中每个无人机与所分配房间之间的最长时间代价t
i,y
(1≤y≤y)最小,即其中q
i,y
为分配方案集合。经过该过程,形成无人机群中每个个体与特定房间入口的映射关系q:pi→
py(i∈[1,n];y=1,2,
…
,y),表示每个房间均有与之对应的无人机。由此,得到每个房间内所需要执行任务的无人机。
[0032]
步骤4:任务、地图及时间三约束的飞行航线规划
[0033]
基于步骤2构建的建筑外空间navmesh栅格地图以及步骤3生成的建筑外空间任务分配结果,采用带时间窗的a*算法(参考文献:徐海军等,“基于a*算法的无冲突路由多路agv控制策略”,工业控制计算机,2018)生成建筑外空间无人机群协同飞行航线,规划结果为表示第i架无人机的建筑外飞行航线,这里的规划过程属于传统的航线规划;
[0034]
基于步骤2构建的建筑内空间带权联通拓扑结构图以及步骤3生成的建筑内空间任务分配结果,采用改进随机搜索树(rrt*,参考文献:杨也等,“改进rrt*的室内机器人路径规划算法”,计算机测量与控制,2020)方法生成建筑内空间无人机群协同飞行航线,并对航线进行时间戳规划,规避机间碰撞风险,规划结果为表示第i架无人机的建筑内飞行航线,这里的规划过程属于最优节点序列搜索与建筑物内的航迹规划融合,属于组合优化范畴。
[0035]
针对每个房间内,以步骤2构建的该房间包围盒入口为起点,以出口为终点,以遍历路径生成算法生成房间内单机飞行航线,可结合对应的房间包围盒尺寸,利用运动目标垂线搜索(mtvl,参考文献:轩永波等,“运动目标的多无人机编队覆盖搜索决策”,系统工程与电子技术,2013)策略进行目标搜索,由于执行房间内任务相对独立,采用匀速飞行策略或均匀时间戳分割策略,规划结果为表示第i架无人机的房间内飞行航线,这里的航迹规划属于一个遍历过程。
[0036]
步骤5:层次化航线规划结果融合
[0037]
将步骤4中每架无人机的飞行航线进行融合,生成每个无人机面向整个建筑空间任务的独立航线,即为第i架无人机从当前所处位置,飞行至任务执行房间执行搜索任务的全部航线,至此,整个任务规划过程结束。
[0038]
以上描述仅是本发明的一个具体实施方式,并未构成对本发明的任何限制。显然对于本领域的专业人员来说,在了解了本发明内容和原理后,都可能在不背离本发明原理、结构的情况下,进行形式和细节上的各种修正和改变,但是这些基于本发明思想的修正和改变仍在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1