一种基于改进Adam优化算法的反应釜连续搅拌过程辨识方法
一种基于改进adam优化算法的反应釜连续搅拌过程辨识方法
技术领域
1.本发明涉及化学工程系统辨识技术领域,尤其涉及一种基于改进adam优化算法的反应釜连续搅拌过程辨识方法。
背景技术:
2.随着社会和科技的发展,化学搅拌反应釜的参数辨识以及控制逐渐成为化工过程控制领域的研究热点,由于搅拌反应釜往往存在着非线性以及系统动态复杂性等特点,其控制参数的辨识往往精度不高。连续搅拌反应釜相比于其他反应釜有很多优势,如投资率低、换热能力强等,具有很高的研究价值,所以需要为反应釜连续搅拌过程建立相应的系统模型,同时辨识所建立模型的参数。为此,不少研究者们也提出了不同的辨识方法,如:最小二乘算法、粒子群算法和差分进化算法等。
3.最小二乘算法在跟踪时变参数过程中存在数据量变多而导致数据饱和的问题;粒子群算法在工程运用中可适用性较高,但算法较为敏感,鲁棒性不强因此导致不稳定,收敛效果容易有问题;差分进化算法是一种新型的遗传算法,具有很好的全局搜索能力和鲁棒性,但由于其计算量较大且对于参数敏感性较大,控制变量参数选择需要一定的经验。
4.如何解决上述技术问题为本发明面临的课题。
技术实现要素:
5.本发明的目的在于提供一种基于改进adam优化算法的反应釜连续搅拌过程辨识方法,本发明提出的改进adam优化算法是一种改进梯度优化算法,它有较快的收敛速度和较高的收敛精度,其计算量远小于智能算法,同时计算精度远好于传统梯度优化算法,能较好的适用于对反应釜连续搅拌过程的参数辨识。
6.本发明是通过如下措施实现的:一种基于改进adam优化算法的反应釜连续搅拌过程辨识方法,包括以下步骤:
7.步骤1)建立反应釜连续搅拌过程的输入非线性hammerstein-carma模型。
8.步骤2)构建改进adam优化算法的辨识流程。
9.作为本发明提供的基于改进adam优化算法的反应釜连续搅拌过程辨识方法进一步优化方案,所述步骤1)的具体建模步骤如下:
10.步骤1-1)构建反应釜连续搅拌过程的输入非线性hammerstein-carma模型:在式(1)中,在式(1)中,y(t)为系统的输出,w(t)为有色噪声,q(t)是系统的无干扰输出:
11.y(t)=q(t)+w(t),
ꢀꢀꢀ
(1)
12.其中q(t)和w(t)分别表示为:
[0013][0014]
(t),ζ2(t):
[0037][0038]
其中:w是二阶矩估计改进参数的限幅参数;
[0039]
步骤2-5)根据式(10)求出改进adam优化算法的一阶矩估计和二阶矩估计数值v(t),s(t):
[0040][0041]
其中:β1是一阶矩估计的控制参数,β2是二阶矩估计的控制参数;
[0042]
步骤2-6)根据式(11)选择合适收敛性限制参数r(t):
[0043][0044]
步骤2-7)根据式(12)求出参数估计向量
[0045][0046]
其中:ε是一避免分母为0的常数,通常取0.0001;
[0047]
步骤2-8)判断是否达到最大递推次数,若没有达到,程序跳转到步骤2-2),若达到,进入步骤2-9);
[0048]
步骤2-9)输出辨识所得参数估计向量完成辨识。
[0049]
与现有技术相比,本发明的有益效果为:
[0050]
(1)本发明建立了反应釜连续搅拌过程参数辨识的模型,将输入冷却剂流量作为输入数据,利用改进adam优化算法对该模型参数进行辨识;由图4和图5可知,该算法可以很好的辨识模型参数。
[0051]
(2)相比adam优化算法,本发明中的改进adam优化算法对一阶矩估计算式中的第二项加上一个根据递推次数不断变化的系数,同时对二阶矩估计学习率进行一个限制,同时因为其改进参数值为自适应的,故以往梯度数据也会减弱对当前时刻一阶矩估计和二阶矩估计的影响,因此就会使得收敛速度得到提升;改进后的adam优化算法能够更好地辨识非线性系统,且辨识的精度也较高,得到的估计误差较小;同时,也说明本辨识方法对于反应釜连续搅拌过程有较好的适用性。
附图说明
[0052]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0053]
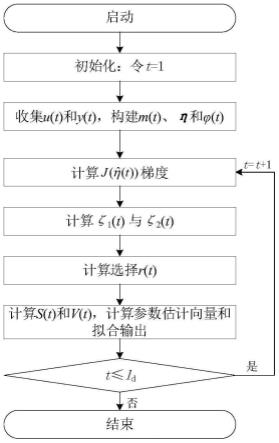
图1为本发明提供的基于改进adam优化算法的反应釜连续搅拌过程辨识方法的整体流程图。
[0054]
图2为本发明提供的基于改进adam优化算法的反应釜连续搅拌过程辨识方法的反应釜连续搅拌过程示意图。
[0055]
图3为本发明提供的改进adam优化算法的反应釜连续搅拌过程辨识方法的输入非线性hammerstein-carma系统的一般模型示意图。
[0056]
图4为本发明辨识参数与真实值的误差示意图。
[0057]
图5为本发明所辨识实施例最后一百次递推所得实际输出与拟合输出对比示意图。
具体实施方式
[0058]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。当然,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0059]
实施例1
[0060]
参见图1至图5,本发明提供其技术方案为,一种基于改进adam优化算法的反应釜连续搅拌过程辨识方法,具体步骤如下:
[0061]
步骤1)建立反应釜连续搅拌过程的输入非线性hammerstein-carma模型;
[0062]
步骤2)构建改进adam优化算法的辨识流程。
[0063]
具体地,所述步骤1)的具体建模步骤如下:
[0064]
步骤1-1)构建反应釜连续搅拌过程的输入非线性hammerstein-carma模型:在式(1)中,在式(1)中,y(t)为系统的输出,w(t)为有色噪声,q(t)是系统的无干扰输出:
[0065]
y(t)=q(t)+w(t),
ꢀꢀꢀ
(1)
[0066]
其中q(t)和w(t)分别表示为:
[0067][0068][0069]
a(z-1
),b(z-1
)和d(z-1
)是关于后移算子z-1
的多项式:
[0070][0071][0072][0073]
步骤1-2)根据式(2)、(3)可以得到输出y(t)与输入u(t)、中间变量m(t)、无干扰输出q(t)和误差v(t)之间的关系,其中
[0074]
q(t)=[1-a(z-1
)]q(t)+[b(z-1
)-1]m(t)+m(t),
ꢀꢀꢀ
(2)
[0075]
对非线性部分的定义如下:
[0076]
m(t)=f(u(t))=γ1f1(u(t))+γ2f2(u(t))+...+γ
mfm
(u(t)),
ꢀꢀꢀ
(3)
[0077]
其中γ=[γ1,γ2,...,γm]
t
∈rm是非线性部分的参数向量,式(2)可以重新表示为:
[0078]
[0079][0080][0081]
其中参数估计向量和系统输入输出数据向量分别为
[0082][0083]
优选地,所述步骤2)构建改进adam优化算法的辨识流程的具体步骤如下:
[0084]
步骤2-1)将输入冷却剂流量作为反应釜连续搅拌过程模型的输入数据,输出流体的浓度为输出数据;
[0085]
步骤2-2)定义适应度函数
[0086][0087]
其中:l是数据长度,t是时间,是系统输出的估计值,y(t)是系统的实际输出值;步骤2-3)根据式(8)对适应度函数求梯度:
[0088][0089]
步骤2-4)根据式(9)求出改进adam算法一阶矩估计和二阶矩估计的改进参数值ζ1(t),ζ2(t):
[0090][0091]
其中:w是二阶矩估计改进参数的限幅参数;
[0092]
步骤2-5)根据式(10)求出改进adam优化算法的一阶矩估计和二阶矩估计数值v(t),s(t):
[0093][0094]
其中:β1是一阶矩估计的控制参数,β2是二阶矩估计的控制参数;
[0095]
步骤2-6)根据式(11)选择合适收敛性限制参数r(t):
[0096][0097]
步骤2-7)根据式(12)求出参数估计向量
[0098]
[0099]
其中:ε是一避免分母为0的常数,通常取0.0001;
[0100]
步骤2-8)判断是否达到最大递推次数,若没有达到,程序跳转到步骤2-2),若达到,进入步骤2-9);
[0101]
步骤2-9)输出辨识所得参数估计向量完成辨识。
[0102]
结合附图以及实施例对本发明对本发明做进一步说明,该实施例仅用于说明本发明,但本发明范围并不限于该实施例。本实施例采用的反应釜连续搅拌过程简图如图2所示。其中,u(t)为输入的冷却剂流量,y(t)搅拌反应完毕输出流体的浓度。
[0103]
通过上述提到的一般输入非线性hammerstein-carma模型,可以将本实施例建立以下模型:
[0104]
y(t)=q(t)+w(t),
[0105][0106]
m(t)=f(u(t))=γ1f1(u(t))+γ2f2(u(t))=1.15u(t)-0.51u2(t),
[0107]
w(t)=1+d1z-1
+d2z-2
=1+0.91z-1-1.38z-2
,
[0108]
对比上述模型和步骤1),可得
[0109]
a1=0.7,a2=0.1,b1=1.8,b2=1.5,γ1=1.15,γ2=-0.51,d1=0.91,d2=-1.38,
[0110]
对于以上模型确定一个适应度函数以便在改进adam优化算法中使用,该适应度函数定义如下:
[0111][0112]
式中,是输出的估计值,y(t)是输出的实际值。
[0113]
为了方便将所需辨识的参数代入改进adam优化算法,将所需辨识的参数组成一个参数向量η,令所需辨识的参数如下:
[0114][0115]
根据步骤2-1)收集输入输出数据;
[0116]
根据步骤2-2)得到适应度函数值
[0117]
根据步骤2-3)对适应度函数求梯度
[0118]
根据步骤2-4)计算改进adam优化算法的一阶矩估计和二阶矩估计的改进优化参数ζ1(t),ζ2(t);
[0119]
根据步骤2-5)计算一阶矩估计和二阶矩估计v(t),s(t);
[0120]
根据步骤2-6)计算选择出适当收敛性限制参数r(t);
[0121]
根据步骤2-7)求出参数估计向量
[0122]
根据步骤2-8)和步骤2-9)完成循环,输出辨识所得参数估计向量完成辨识。
[0123]
其中,在设定一阶矩估计和二阶矩估计的参数β1,β2的初始值以及r(t)时需要考虑几个问题:一阶矩估计的β1设置过大时,会导致收敛速度加快,但同时收敛精度会有所降低,二阶矩估计的β2设置过大时会导致收敛速度变慢。为了保证的收敛性,对称矩阵
必须在单位圆中具有所有的特征值,一个相对保守的方法为对r(t)的取值进行一个区间限制。因此选取这些参数是需要根据不同的系统来进行合理选择。
[0124]
使用本发明的基于改进adam优化算法的反应釜连续搅拌过程辨识方法进行的参数辨识结果如图4所示,实际输出和拟合输出辨识结果对比如图5所示。可以看出,本方法的辨识精度高,计算维度小,因此收敛所需时间很快,只需要较少时间就可以达到最大递推次数。同时,也说明本辨识方法对于反应釜连续搅拌过程模型有较好的适用性。
[0125]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1