机器人的导航异常恢复方法、机器人及清洁系统与流程
本公开涉及机器人,具体涉及一种机器人的导航异常恢复方法、机器人及清洁系统。
背景技术:
1、随着机器人技术的发展,机器人根据slam算法(simultaneous localization andmapping,同步定位与地图构建)边行走边探索构图,以便生成地图。由于环境比较复杂,机器人也容易陷入导航异常状态,比如机器人需要穿过垂悬物体达到目标位置进行探索构图,比如垂悬物体为高架物体,由于垂悬物体挡住了机器人的顶部,导致机器人无法顺利穿过。。
2、由于垂悬物体的中部是镂空的,机器人探索到前方并非存在障碍物,于是,机器人会机械式地按照导航路径继续向前行走并碰撞垂悬物体,如此会导致机器人无法脱离垂悬物体而陷入导航异常状态。通常,当机器人处于导航异常状态时,机器人生成提示信息,以提示用户人工将机器人撤离出垂悬物体,此种导航恢复方式存在效率低的问题。
3、公开内容
4、本公开实施例的一个目的旨在提供一种机器人的导航异常恢复方法、机器人及清洁系统,旨在改善现有机器人导航异常恢复的效率较低的问题。
5、在第一方面,本公开实施例提供一种机器人的导航异常恢复方法,包括:
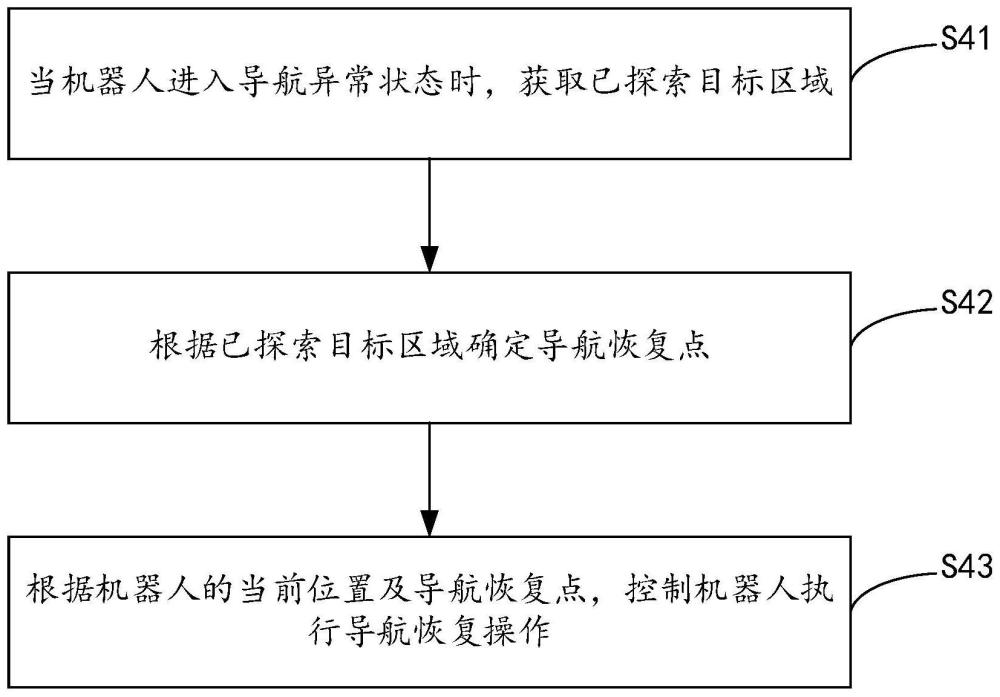
6、当所述机器人进入导航异常状态时,获取已探索目标区域;
7、根据所述已探索目标区域确定导航恢复点;
8、根据所述机器人的当前位置及所述导航恢复点,控制所述机器人执行导航恢复操作。
9、可选地,所述已探索目标区域包括多个已探索点,所述已探索点为所述机器人在探索构图时已探索的位置点,所述根据所述已探索目标区域确定导航恢复点包括:
10、判断所述已探索目标区域是否存在满足距离筛选条件的已探索点;
11、若存在,则选择所述已探索点作为导航恢复点;
12、若不存在,则获取已走路径,根据所述已走路径及所述当前位置确定导航恢复点,其中,所述已走路径包括当前位置。
13、可选地,所述判断所述已探索目标区域是否存在满足距离筛选条件的已探索点包括:
14、判断所述已探索目标区域是否存在与所述当前位置的相对距离在预设距离范围内且可达的已探索点。
15、可选地,所述判断所述已探索目标区域是否存在与所述当前位置的相对距离在预设距离范围内且可达的已探索点包括:
16、判断所述已探索目标区域是否存在与所述当前位置的相对距离在预设距离范围内的已探索点;
17、若存在,则根据所述当前位置及与所述当前位置的相对距离在预设距离范围内的已探索点,确定移动路径,根据所述移动路径,判断所述机器人由所述当前位置是否可到达所述已探索点;
18、若不存在,则继续搜索与所述当前位置的相对距离在预设距离范围内的另一个已探索点。
19、可选地,所述已走路径包括依序排列的多个已走点,所述根据所述已走路径及所述当前位置确定导航恢复点包括:
20、确定数据搜索方向,所述数据搜索方向为与所述多个已走点依序形成的数据方向相反的方向;
21、根据所述数据搜索方向,搜索所述已走路径;
22、选择首个与所述当前位置的相对距离落在预设距离范围内的已走点作为导航恢复点。
23、可选地,根据所述机器人的当前位置及所述导航恢复点,控制所述机器人执行导航恢复操作包括:
24、根据所述机器人的当前位置及所述导航恢复点,确定导航路径;
25、根据所述导航路径,控制所述机器人由所述当前位置导航至所述导航恢复点。
26、可选地,所述获取已探索目标区域包括:
27、获取各个已探索区域;
28、在各个所述已探索区域中选择与所述当前位置最近的已探索区域作为已探索目标区域。
29、可选地,当所述导航异常状态为探索异常状态时,执行导航恢复操作后,所述方法还包括:
30、确定探索导航点;
31、控制所述机器人由所述导航恢复点导航至所述探索导航点进行探索所述待探索区域,以得到清洁地图。
32、可选地,所述待探索区域包括已构图区域和待构图区域,所述确定探索导航点包括:根据探索收益算法,在所述已构图区域上选择最大探索收益值的已探索点作为探索导航点。
33、可选地,当所述导航异常状态为返航异常状态时,执行导航恢复操作后,所述方法还包括:
34、确定返航点;
35、控制所述机器人由所述导航恢复点导航至所述返航点。
36、可选地,在获取已探索目标区域前,所述方法还包括:
37、当所述机器人检测到导航异常信息时,控制所述机器人进入导航异常状态,其中,所述导航异常信息包括:所述机器人在预设时长内都在固定位置范围的检测信息,和/或,所述机器人在预设时长内未抵达指定位置的检测信息,和/或,所述机器人与障碍物之间的碰撞信号大于或等于碰撞阈值的检测信息。
38、在第二方面,本公开实施例提供一种机器人,包括:
39、至少一个处理器;以及,
40、与所述至少一个处理器通信连接的存储器;其中,
41、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的机器人的导航异常恢复方法。
42、在第三方面,本公开实施例提供一种清洁系统,其特征在于,包括:
43、上述的机器人;及
44、服务器,所述服务器与所述机器人通信连接。
45、在本公开实施例提供的机器人的导航异常恢复方法中,当机器人进入导航异常状态时,获取已探索目标区域,根据已探索目标区域确定导航恢复点,根据机器人的当前位置及导航恢复点,控制机器人执行导航恢复操作。本实施例能够自动确定导航恢复点,以控制机器人执行导航恢复操作,无需人工介入,有利于提高导航异常恢复的效率。
技术实现思路
技术特征:
1.一种机器人的导航异常恢复方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述已探索目标区域包括多个已探索点,所述已探索点为所述机器人在探索构图时已探索的位置点,所述根据所述已探索目标区域确定导航恢复点包括:
3.根据权利要求2所述的方法,其特征在于,所述判断所述已探索目标区域是否存在满足距离筛选条件的已探索点包括:
4.根据权利要求3所述的方法,其特征在于,所述判断所述已探索目标区域是否存在与所述当前位置的相对距离在预设距离范围内且可达的已探索点包括:
5.根据权利要求2所述的方法,其特征在于,所述已走路径包括依序排列的多个已走点,所述根据所述已走路径及所述当前位置确定导航恢复点包括:
6.根据权利要求1所述的方法,其特征在于,根据所述机器人的当前位置及所述导航恢复点,控制所述机器人执行导航恢复操作包括:
7.根据权利要求1所述的方法,其特征在于,所述获取已探索目标区域包括:
8.根据权利要求1至7任一项所述的方法,其特征在于,当所述导航异常状态为探索异常状态时,执行导航恢复操作后,还包括:
9.根据权利要求8所述的方法,其特征在于,所述待探索区域包括已构图区域和待构图区域,所述确定探索导航点包括:根据探索收益算法,在所述已构图区域上选择最大探索收益值的已探索点作为探索导航点。
10.根据权利要求1至7任一项所述的方法,其特征在于,当所述导航异常状态为返航异常状态时,执行导航恢复操作后,还包括:
11.根据权利要求1至7任一项所述的方法,其特征在于,在获取已探索目标区域前,还包括:
12.一种机器人,其特征在于,包括:
13.一种清洁系统,其特征在于,包括:
技术总结
本公开涉及机器人技术领域,具体涉及一种机器人的导航异常恢复方法、机器人及清洁系统。导航异常恢复方法包括:当机器人进入导航异常状态时,获取已探索目标区域,根据已探索目标区域确定导航恢复点,根据机器人的当前位置及导航恢复点,控制机器人执行导航恢复操作。本实施例能够自动确定导航恢复点,以控制机器人执行导航恢复操作,无需人工介入,有利于提高导航异常恢复的效率。
技术研发人员:阳方平,任亮亮,李文涛,武康康
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!