作业车的制作方法
作业车
1.本技术为下述申请的分案申请:
2.原申请的申请日:2017.03.31
3.原申请的申请号:201710211435.4
4.原申请的发明名称:
5.本发明涉及一种作业车,该作业车具有:设定目标直线前进路线的路线设定部;测定行驶车体的位置和方位的测位单元;以及控制所述行驶车体的行驶方向的方向控制部。
背景技术:
6.在作为作业车的一例的乘用插秧机中,有的乘用插秧机根据gps装置所测量的位置信息,通过示教路线生成构件而生成示教路线和与示教路线平行的目标路线,使行驶车体在目标路线上自主行驶(例如参照日本特开2008-131880号公报(专利文献1))。
7.在作为作业车的一例的乘用插秧机中,有的乘用插秧机具有:与行驶机体的转向操作连动地使水田作业装置自动地上升的自动上升控制构件;以及与变速杆被操作到后退变速操作路线连动地使水田作业装置自动地上升的备用控制构件(例如参照日本特开2012-85646号公报(专利文献2))。
8.在作为作业车的一例的乘用插秧机中,有的乘用插秧机构成为具有能够进行主变速装置的变速操作和前进后退切换操作的主变速杆,将对主变速杆进行操作引导的导引槽中所具有的左右方向上的前进后退切换路线中的前进变速路线侧的横外侧设定为发动机停止位置,并且在导引板上装备有检测主变速杆向发动机停止位置的操作的开关,在根据开关的输出而检测出主变速杆在发动机停止位置上的规定的时间的保持操作的情况下,停止发动机(例如参照日本特开2006-94753号公报(专利文献3))。
9.在上述专利文献1所述的结构中,能够使乘用插秧机在目标路线上自主行驶。然而,当乘用插秧机到达方向转换区域(枕地)时,机体的行驶自动地或者根据驾驶者(操作者)的操作而停止。并且,驾驶者通过使对地作业装置(插植部)上升并对自主行驶开关进行操作,而使乘用插秧机向期望的方向自动地回旋,并且在结束了自动回旋之后,在下一目标路线上自主地行驶。并且,当到达插植开始位置时,机体的行驶自动地或者根据驾驶者的操作而停止。然后,通过根据驾驶者的操作使对地作业装置下降,而接着在目标路线上自主地行驶。
10.即,在上述专利文献1所记载的结构中,在使对地作业装置切换到作业状态和非作业状态的情况下,在使乘用插秧机的行驶暂时停止之后,需要由驾驶者进行对地作业装置的升降操作等。结果为,导致作业效率的降低,并且在减轻作业行驶时所需的驾驶者的工作的方面上有改善的余地。
11.在上述专利文献2所记载的结构中,当乘用插秧机的一行程的作业行驶结束,为了在方向转换区域(田埂边)上的方向转换而使机体大幅转向时,自动上升控制发挥作用而使
对地作业装置(水田作业装置)自动地上升,并且切断向对地作业装置的传动。另外,当乘用插秧机的一行程的作业行驶结束,为了在方向转换区域上的方向转换(开关转向)而使机体后退时,备用控制发挥作用而使对地作业装置自动地上升,并且切断向对地作业装置的传动。然而,在乘用插秧机的方向转换后,通过由驾驶者对操作杆进行操作而使对地作业装置下降从而与作业地(农田)接地,然后通过由驾驶者再次对操作杆进行操作而再次开始向对地作业装置的传动。
12.即,在上述专利文献2所记载的结构中,虽然与乘用插秧机的方向转换操作连动地由对地作业装置自动地从作业状态切换到非作业状态,但在使对地作业装置从非作业状态切换到作业状态的情况下,需要由驾驶者对操作杆进行操作。另外,上述专利文献2所记载的结构中,由于无法使乘用插秧机在目标路线上自动地行驶,因此驾驶者需要进行操纵以使乘用插秧机不会从目标路线偏离。结果为,在减轻作业行驶时所需的驾驶者的工作的方面上有改善的余地。
13.在上述专利文献3所记载的结构中,当在作业行驶中需要进行秧苗补给作业等的情况下,驾驶者能够通过将主变速杆操作到前进后退切换路线,而使乘用插秧机的行驶停止,然后能够通过将主变速杆操作到发动机停止位置而停止发动机。并且,在秧苗补给作业等结束后,驾驶者能够通过将主变速杆从发动机停止位置操作到前进后退切换路线而使发动机再启动,然后能够通过将主变速杆操作到前进变速路线而使乘用插秧机前进。然而,上述专利文献3所记载的结构中,由于无法使乘用插秧机在目标路线上自动地行驶,因此驾驶者需要进行操纵以使乘用插秧机不会从目标路线偏离。
14.即,在上述专利文献3所记载的结构中,虽然能够抑制因秧苗补给作业时发动机运转而引起的多余的燃料消耗,但在减轻作业行驶时所需的驾驶者的工作的方面上有改善的余地。
技术实现要素:
15.本发明鉴于上述技术问题而作,其目的在于提供如下的作业车:能够不会导致作业效率的降低,另外抑制多余的燃料消耗并且减轻作业行驶时所需的驾驶者的工作。
16.本发明的作业车:设定目标直线前进路线的路线设定部;测定行驶车体的位置和方位的测位单元;控制所述行驶车体的行驶方向的方向控制部;检测所述行驶车体的行驶状态的推移的推移检测部;以及将以能够升降的方式与所述行驶车体连结的对地作业装置切换到作业状态和非作业状态的作业控制部,所述方向控制部在所述目标直线前进路线的控制对象区域中,执行根据所述目标直线前进路线和所述测位单元的测位结果而使所述行驶车体自动地在所述目标直线前进路线上行驶的自动直线前进控制,所述作业控制部与所述推移检测部检测出所述行驶车体从直线前进状态转移到方向转换状态连动地执行将所述对地作业装置切换到所述非作业状态的非作业状态切换控制,并且与所述推移检测部检测出所述行驶车体从方向转换状态转移到直线前进状态连动地执行将所述对地作业装置切换到所述作业状态的作业状态切换控制。
17.根据该方式,由于在目标直线前进路线的控制对象区域中,行驶车体根据方向控制部的控制工作而自动地在目标直线前进路线上行驶,因此驾驶者不需要进行操纵以使行驶车体不会从目标直线前进路线上偏离。
18.并且,当行驶车体从目标直线前进路线的控制对象区域偏离时,驾驶者进行行驶车体的操纵,当伴随着行驶车体到达作业地的方向转换区域,驾驶者开始进行使行驶车体从当前的目标直线前进路线移动到下一目标直线前进路线的方向转换操作时,推移检测部检测出行驶车体从直线前进状态转移到方向转换状态,根据基于该检测的作业控制部的控制工作而与行驶车体从直线前进状态转移到方向转换状态连动地使对地作业装置从作业状态切换到非作业状态。
19.然后,当伴随着行驶车体到达到下一目标直线前进路线而由驾驶者结束方向转换操作时,推移检测部检测出行驶车体从方向转换状态转移到直线前进状态,根据基于该检测的作业控制部的控制工作而与行驶车体从方向转换状态转移到直线前进状态连动地使对地作业装置从非作业状态切换到作业状态。
20.即,在目标直线前进路线的控制对象区域中,执行自动直线前进控制而使行驶车体自动地在目标直线前进路线上行驶,另外,在方向转换区域中,与驾驶者的方向转换操作连动地适当地执行作业状态切换控制和非作业状态切换控制,而使对地作业装置在适当的时机切换到作业状态和非作业状态。
21.结果为,能够在不会导致作业效率的降低的情况下有效地减轻作业行驶时所需的驾驶者的工作。
22.作为用于解决上述的课题的其他的方式,本发明的作业车具有:设定目标直线前进路线的路线设定部;测定行驶车体的位置和方位的测位单元;控制所述行驶车体的行驶方向的方向控制部;控制发动机的工作的发动机控制部;以及判定所述发动机的临时停止条件和再启动条件是否成立的条件判定部,所述方向控制部在所述目标直线前进路线的控制对象区域中,执行根据所述目标直线前进路线和所述测位单元的测位结果而使所述行驶车体自动地在所述目标直线前进路线上行驶的自动直线前进控制,在所述条件判定部判定出所述临时停止条件成立时,所述发动机控制部执行使所述发动机临时停止的发动机临时停止控制,并且在所述条件判定部判定出所述再启动条件成立时,所述发动机控制部执行再启动所述发动机的发动机再启动控制,当在所述自动直线前进控制的执行过程中执行所述发动机临时停止控制时,所述方向控制部中断所述自动直线前进控制,并且当在所述自动直线前进控制的中断过程中执行所述发动机再启动控制时,所述方向控制部再次开始所述自动直线前进控制。
23.根据该方式,由于在目标直线前进路线的控制对象区域中,行驶车体根据方向控制部的控制工作而自动地在目标直线前进路线上行驶,因此驾驶者不需要进行操纵以使行驶车体不会从目标直线前进路线上偏离。
24.这里,例如作业车具有贮存向作业地供给的供给物的贮存部,另外,假设发动机的临时停止条件被设定为主变速杆从中立位置被操作到发动机停止位置,并且发动机的再启动条件被设定为主变速杆从发动机停止位置被操作到中立位置。
25.在这样的作业车中,当在自动直线前进控制的执行过程中需要向贮存部补给供给物的时,例如当驾驶者将主变速杆操作到中立位置时,向行驶装置的传动被切断而使行驶车体停止行驶。然后,当驾驶者将主变速杆操作到发动机停止位置时,条件判定部判定出发动机的临时停止条件成立,根据基于该判定的发动机控制部的控制工作而使发动机临时停止。由此,对于驾驶者而言,能够防止在补给作业时燃料被多余地消耗,并且快速地向贮存
部补给供给物。另外,此时,由于方向控制部中断自动直线前进控制,因此能够防止在发动机的临时停止中因持续进行自动直线前进控制而导致的多余的电力消耗。
26.然后,当驾驶者结束供给物向贮存部的补给而使主变速杆从发动机停止位置操作到中立位置时,条件判定部判定出发动机的再启动条件成立,根据基于该判定的发动机控制部的控制工作而再次启动发动机。然后,当驾驶者将主变速杆从中立位置操作到前进侧的变速位置时,向行驶装置传递前进动力而使行驶车体前进。并且,由于在该前进行驶时方向控制部伴随着发动机的再启动而再次开始自动直线前进控制,因此行驶车体自动地在目标直线前进路线上行驶。
27.结果为,能够防止多余的燃料消耗和电力消耗并且减轻作业行驶时所需的驾驶者的工作。
28.作为用于解决上述的课题的其他的方式,
29.本发明的作业车具有:设定目标直线前进路线的路线设定部;测定行驶车体的位置和方位的测位单元;控制所述行驶车体的行驶方向的方向控制部;检测所述行驶车体的行驶状态的推移的推移检测部;将以能够升降的方式与所述行驶车体连结的对地作业装置切换到作业状态和非作业状态的作业控制部;控制发动机的工作的发动机控制部;以及判定所述发动机的临时停止条件和再启动条件是否成立的条件判定部,所述方向控制部在所述目标直线前进路线的控制对象区域中,执行根据所述目标直线前进路线和所述测位单元的测位结果而使所述行驶车体自动地在所述目标直线前进路线上行驶的自动直线前进控制,所述作业控制部与所述推移检测部检测出所述行驶车体从直线前进状态转移到方向转换状态连动地执行将所述对地作业装置切换到所述非作业状态的非作业状态切换控制,并且与所述推移检测部检测出所述行驶车体从方向转换状态转移到直线前进状态连动地执行将所述对地作业装置切换到所述作业状态的作业状态切换控制,在所述条件判定部判定出所述临时停止条件成立时,所述发动机控制部执行使所述发动机临时停止的发动机临时停止控制,并且在所述条件判定部判定出所述再启动条件成立时,所述发动机控制部执行再启动所述发动机的发动机再启动控制,当在所述自动直线前进控制的执行过程中执行所述发动机临时停止控制时,所述方向控制部中断所述自动直线前进控制,并且当在所述自动直线前进控制的中断过程中执行所述发动机再启动控制的情况下,所述方向控制部再次开始所述自动直线前进控制。
30.根据该方式,由于在目标直线前进路线的控制对象区域中,行驶车体根据方向控制部的控制工作而自动地在目标直线前进路线上行驶,因此驾驶者不需要进行操纵以使行驶车体不会从目标直线前进路线上偏离。
31.并且,当行驶车体从目标直线前进路线的控制对象区域偏离时,驾驶者进行行驶车体的操纵,当伴随着行驶车体到达作业地的方向转换区域而由驾驶者开始进行使行驶车体从当前的目标直线前进路线移动到下一目标直线前进路线的方向转换操作时,推移检测部检测出行驶车体从直线前进状态转移到方向转换状态,根据基于该检测的作业控制部的控制工作而与行驶车体从直线前进状态转移到方向转换状态连动地将对地作业装置从作业状态切换到非作业状态。
32.然后,当伴随着行驶车体到达下一目标直线前进路线而由驾驶者结束方向转换操作时,推移检测部检测出行驶车体从方向转换状态转移到直线前进状态,根据基于该检测
的作业控制部的控制工作而与行驶车体从方向转换状态转移到直线前进状态连动地将对地作业装置从非作业状态切换到作业状态。
33.即,在目标直线前进路线的控制对象区域中,执行自动直线前进控制而使行驶车体自动地在目标直线前进路线上行驶,另外,在方向转换区域中,与驾驶者的方向转换操作连动地适当地执行作业状态切换控制和非作业状态切换控制,而使对地作业装置在适当的时机切换到作业状态和非作业状态。
34.这里,例如作业车具有贮存向作业地供给的供给物的贮存部,另外,假设发动机的临时停止条件被设定为主变速杆从中立位置被操作到发动机停止位置,并且发动机的再启动条件被设定为主变速杆从发动机停止位置被操作到中立位置。
35.在这样的作业车中,当在自动直线前进控制的执行过程中需要向贮存部补给供给物时,例如当驾驶者将主变速杆操作到中立位置时,向行驶装置的传动被切断而使行驶车体停止行驶。然后,当驾驶者将主变速杆操作到发动机停止位置时,条件判定部判定出发动机的临时停止条件成立,根据基于该判定的发动机控制部的控制工作而使发动机临时停止。由此,对于驾驶者而言,能够防止在补给作业时燃料被多余地消耗,并且快速地向贮存部补给供给物。另外,此时,由于方向控制部中断自动直线前进控制,因此能够防止在发动机的临时停止中因持续进行自动直线前进控制而导致的多余的电力消耗。
36.然后,当驾驶者结束供给物向贮存部的补给而使主变速杆从发动机停止位置操作到中立位置时,条件判定部判定出发动机的再启动条件成立,根据基于该判定的发动机控制部的控制工作而再次启动发动机。然后,驾驶者将主变速杆从中立位置操作到前进侧的变速位置时,向行驶装置传递前进动力而使行驶车体前进。并且,由于在该前进行驶时方向控制部伴随着发动机的再启动而再次开始自动直线前进控制,因此行驶车体自动地在目标直线前进路线上行驶。
37.结果为,能够不会导致作业效率的降低,另外能防止多余的燃料消耗和电力消耗,并且有效地减轻作业行驶时所需的驾驶者的工作。
38.作为用于使本发明更优选的一个方式,所述测位单元具有卫星导航装置和惯性测量装置。
39.根据该方式,例如能够根据从卫星导航装置得到的作业车的绝对位置而校正从惯性测量装置得到的作业车的相对位置所包含的累积误差。
40.另外,例如能够使用装备于惯性测量装置的三轴的陀螺仪等来校正因行驶车体的倾斜导致的gps天线的位置偏移所引起的卫星导航装置的测位误差。
41.结果为,能够高精度地测定行驶车体的位置和方位,在目标直线前进路线的控制对象区域中,能够通过方向控制部的控制工作而使行驶车体高精度地在目标直线前进路线上行驶。
42.作为用于使本发明更优选的一个方式,该作业车具有:使从电池向各电子产品的通电断续的手动式的主开关;以及能够绕过所述主开关地从所述电池向所述卫星导航装置通电的通电保持部,所述通电保持部与所述主开关的切断操作连动地切换到从所述电池向所述卫星导航装置通电的通电保持状态,并且与所述主开关的连接操作连动地切换到停止从所述电池向所述卫星导航装置通电的通电停止状态。
43.驾驶者有时为了防止因休息等引起的作业行驶的中断过程中的多余的燃料消耗,
进行主开关的切断操作而切断从电池向各电子产品的通电从而停止发动机。此时,通常通过停止向卫星导航装置通电而使卫星导航装置也停止工作。
44.这里,公知有卫星导航装置在从开始向卫星导航装置通电之后直到能够进行使用了卫星的测位为止所需的加载时间较长。因此,例如当为了防止休息中等的多余的燃料消耗而由驾驶者进行主开关的切断操作从而停止发动机时,由于卫星导航装置也伴随着此时的切断操作而停止工作,因此驾驶者即使在结束休息等时操作主开关而启动发动机,在直到卫星导航装置上升为止的期间中也无法再次开始使用了自动直线前进控制的作业行驶。结果为,在等待卫星导航装置的加载的情况下会导致作业效率的降低,另外在不等待卫星导航装置的加载而再次开始作业行驶的情况下,强迫驾驶者进行操纵的工作以使乘用插秧机不会从目标路线偏离。
45.因此,在该方式中,例如当为了防止休息中等的多余的燃料消耗而由驾驶者进行主开关的切断操作从而停止发动机的情况下,与此时的主开关的切断操作连动地,使通电保持部切换到通电保持状态而将卫星导航装置维持在工作状态。由此,当驾驶者在结束休息等时操作主开关而启动发动机的情况下,能够与发动机的启动一同再次开始进行使用了自动直线前进控制的作业行驶。
46.结果为,能够在不会导致作业效率的降低、或者施加给驾驶者的工作的增大的情况下,防止休息中等的多余的燃料消耗。
47.作为用于使本发明更优选的一个方式,该作业车具有:使从电池向各电子产品的通电断续的手动式的主开关;以及能够绕过所述主开关地从所述电池向所述惯性测量装置通电的通电保持部,所述通电保持部与所述主开关的切断操作连动地切换到从所述电池向所述惯性测量装置通电的通电保持状态,并且与所述主开关的连接操作连动地切换到停止从所述电池向所述惯性测量装置通电的通电停止状态。
48.驾驶者有时为了防止因休息等引起的作业行驶的中断过程中的多余的燃料消耗,进行主开关的切断操作而切断从电池向各电子产品的通电从而停止发动机。此时,通常通过停止向惯性测量装置通电而使惯性测量装置也停止工作。
49.这里,公知有惯性测量装置所具有的陀螺仪当不进行预热运转时测定精度不稳定。因此,例如当为了防止休息中等的多余的燃料消耗而由驾驶者进行主开关的切断操作从而停止发动机时,由于惯性测量装置也伴随着此时的切断操作而停止工作,因此即使驾驶者在结束休息等时操作主开关而启动发动机,在直到陀螺仪的预热运转结束为止的期间中也无法再次开始进行使用了自动直线前进控制的作业行驶。结果为,在等待陀螺仪的预热运转结束的情况下会导致作业效率的降低,另外在不等待预热运转的结束而再次开始作业行驶的情况下,强迫驾驶者进行操纵的工作以使乘用插秧机不会从目标路线偏离。
50.因此,在该方式中,例如当为了防止休息中等的多余的燃料消耗而由驾驶者进行主开关的切断操作从而停止发动机的情况下,与此时的主开关的切断操作连动地,使通电保持部切换到通电保持状态而将惯性测量装置维持在工作状态。由此,当驾驶者在结束休息等时操作主开关而启动发动机的情况下,能够与发动机的启动一同再次开始进行使用了自动直线前进控制的作业行驶。
51.结果为,能够在不会导致作业效率的降低、或者施加给驾驶者的工作的增大的情况下,防止休息中等的多余的燃料消耗。
52.作为用于使本发明更优选的一个方式,所述通电保持部与所述主开关的切断操作连动地切换到所述通电保持状态并且开始计时,当在切换到所述通电保持状态之后直到经过了设定时间为止的期间中进行了所述主开关的连接操作的情况下,所述通电保持部与该连接操作连动地从所述通电保持状态切换到所述通电停止状态,并且当在直到经过了所述设定时间为止的期间中未进行所述主开关的连接操作的情况下,伴随着所述设定时间的经过而从所述通电保持状态切换到所述通电停止状态。
53.根据该方式,当驾驶者伴随着作业的完成而进行了主开关的切断操作的情况下,通电保持部伴随着设定时间的经过而自动地从通电保持状态切换到通电停止状态,而停止向卫星导航装置或者惯性测量装置通电。由此,例如,如果将所述设定时间设定成比假定为作业行驶的中断时间的最长时间长的时间,则能够避免在因休息中等引起的作业行驶的中断过程中停止向卫星导航装置或者惯性测量装置通电,并且抑制在作业的完成后还不必要地持续向卫星导航装置或者惯性测量装置通电。
54.结果为,能够防止休息中等的多余的燃料消耗,而且能够抑制作业完成后的多余的电力消耗。
55.作为用于使本发明更优选的一个方式,根据按照每个由所述通电保持部进行通电保持的电子产品所设定的通电保持的重要度,越是重要度较高的电子产品所述设定时间越被设定为较长的时间。
56.根据该方式,与使通电保持的重要度较高的电子产品的通电保持时间和通电保持的重要度较低的电子产品的通电保持时间相同的情况相比,能够抑制停止发动机的休息中等的电池的消耗。
57.作为用于使本发明更优选的一个方式,该作业车具有向驾驶者通知各种信息的通知装置,所述通电保持部在所述通电保持状态中从所述电池向所述通知装置通电,并且在所述通电停止状态中停止向所述通知装置通电,所述通知装置在所述通电保持状态的工作中向驾驶者通知与所述通电保持状态相关的信息。
58.根据该方式,例如能够向驾驶者通知卫星导航装置或者惯性测量装置处于通电保持部的通电保持状态、或者通电保持部从通电保持状态切换到通电停止状态为止的剩余时间等。
59.作为用于使本发明更优选的一个方式,该作业车具有:控制车速的车速控制部;以及推定出驾驶者从驾驶状态转移到除了驾驶以外的其他的作业状态的转移推定部,在所述转移推定部推定出驾驶者转移到所述其他的作业状态的情况下,所述车速控制部执行使车速降低的减速控制。
60.根据该方式,能够由转移推定部推定出驾驶者从驾驶状态转移到除了驾驶以外的其他的作业状态的阶段开始通过车速控制部的减速控制来降低车速。
61.由此,在驾驶者从驾驶状态转移到其他的作业状态之前所进行的行驶车体的行驶停止操作中,能够缩短直到行驶车体行驶停止为止所需的时间。
62.结果为,能够高效地从驾驶状态转移到其他的作业状态。
63.作为用于使本发明更优选的一个方式,该作业车具有第一座席传感器,该第一座席传感器检测施加给驾驶座席的负荷的变动,在根据所述第一座席传感器的检测而检测出负荷的降低的情况下,所述转移推定部推定出驾驶者转移到所述其他的作业状态。
64.根据该方式,驾驶者当在忘记了使行驶车体行驶停止的状态下从驾驶状态转移到其他的作业状态时,转移推定部根据第一座席传感器的检测而推定出驾驶者从驾驶状态转移到其他的作业状态。并且,车速因基于该推定的车速控制部的减速控制而降低。
65.由此,能够使驾驶者发现忘记使行驶车体行驶停止,能够促使进行行驶车体的行驶停止操作。并且,能够缩短由驾驶者进行行驶车体的行驶停止操作之后直到行驶车体行驶停止所需的时间。
66.作为用于使本发明更优选的一个方式,该作业车具有第二座席传感器,该第二座席传感器检测能够从向前的基准位置绕纵轴回旋的驾驶座席的回旋移动,所述转移推定部在根据所述第二座席传感器的检测而检测出所述驾驶座席从所述基准位置起的回旋移动的情况下,推定出驾驶者转移到所述其他的作业状态。
67.根据该方式,驾驶者当在忘记了使行驶车体行驶停止的状态下从驾驶状态转移到其他的作业状态时,转移推定部根据第二座席传感器的检测而推定出驾驶者从驾驶状态转移到其他的作业状态。并且,车速因基于该推定的车速控制部的减速控制而降低。
68.由此,能够使驾驶者发现忘记了使行驶车体行驶停止,能够促使进行行驶车体的行驶停止操作。并且,能够缩短由驾驶者进行行驶车体的行驶停止操作之后直到行驶车体行驶停止所需的时间。
69.作为用于使本发明更优选的一个方式,该作业车具有:贮存向作业地供给的供给物的贮存部;检测所述贮存部中的残量的残量检测部;以及向驾驶者通知所述残量检测部的检测值降低到补给用的设定值的通知部,在所述残量检测部的检测值降低到所述设定值的情况下,所述转移推定部推定出驾驶者转移到所述其他的作业状态。
70.根据该方式,转移推定部能够根据残量检测部的检测而推定出驾驶者从驾驶状态转移到作为其他的作业状态的向贮存部补给供给物的补给作业状态。并且,车速因基于该推定的车速控制部的减速控制而降低。由此,在驾驶者从驾驶状态转移到补给作业状态之前所进行的行驶车体的行驶停止操作中,能够缩短直到行驶车体行驶停止所需的时间。
71.结果为,能够从驾驶状态高效地转移到补给作业状态。
72.作为用于使本发明更优选的一个方式,所述残量检测部通过基于所述测位单元的测位结果的运算处理来检测所述贮存部中的残量。
73.根据该方式,残量检测部例如根据贮存部中的供给物的贮存量、每单位距离的供给物的供给量以及作为测位单元的测位结果而得到的作业地上的行驶距离等,而检测贮存部中的残量。
74.即,作为残量检测部不具有检测供给物的残量的专用的传感器,而能够检测贮存部中的残量。
75.结果为,能够通过部件件数的削减而实现结构的简化等。
76.作为用于使本发明更优选的一个方式,该作业车具有:检测与作业相关的不良情况的产生的不良情况传感器;以及向驾驶者通知所述不良情况的产生的通知部,在所述不良情况传感器检测出不良情况的产生的情况下,所述转移推定部推定出驾驶者转移到所述其他的作业状态。
77.根据该方式,转移推定部能够根据不良情况传感器的检测而推定出驾驶者从驾驶状态转移到作为其他的作业状态的用于解除不良情况传感器所检测的不良情况的维修作
业状态。并且,车速因基于该推定的车速控制部的减速控制而降低。因此,在驾驶者从驾驶状态转移到维修作业状态之前所进行的行驶车体的行驶停止操作中,能够缩短直到行驶车体行驶停止为止所需的时间。
78.结果为,能够高效地从驾驶状态转移到维修作业状态。
79.作为用于使本发明更优选的一个方式,该作业车具有手动式的切换开关,该手动式的切换开关将所述转移推定部切换到工作状态和停止状态。
80.根据该方式,例如当在作业行驶的结束附近等判断为驾驶者不需要进行向贮存部补给供给物等其他的作业的情况下,能够通过将转移推定部切换到停止状态而避免因车速控制部的减速控制引起的车速的降低。
81.由此,在不需要进行其他的作业的情况下,能够利用车速控制部的减速控制而避免因车速降低引起的作业效率的降低。
82.作为用于使本发明更优选的一个方式,该作业车具有转移检测部,该转移检测部检测出驾驶者从驾驶状态转移到除了驾驶以外的其他的作业状态,在所述转移检测部检测出驾驶者转移到所述其他的作业状态的情况下,所述车速控制部执行使车速降低的减速控制而使车速降低到零速。
83.根据该方式,在转移检测部检测出驾驶者从驾驶状态转移到除了驾驶以外的其他的作业状态的情况下,能够通过车速控制部的减速控制而使行驶车体行驶停止。
84.由此,能够防止在维持着行驶车体的行驶状态的状态下,驾驶者进行除了驾驶以外的其他的作业。
85.作为用于使本发明更优选的一个方式,该作业车具有:贮存向作业地供给的预备的供给物的预备贮存部;以及检测所述预备贮存部中的残量的降低的预备残量传感器,在所述预备残量传感器检测出残量的降低的情况下,所述转移检测部检测出驾驶者转移到所述其他的作业状态。
86.根据该方式,转移检测部能够根据预备残量传感器的检测而检测出驾驶者从驾驶状态转移到作为其他的作业状态的向贮存部补给供给物的补给作业状态。并且,能够通过基于该检测的车速控制部的减速控制而使行驶车体行驶停止。
87.由此,能够防止在维持着行驶车体的行驶状态的状态下,驾驶者进行补给作业。
88.作为用于使本发明更优选的一个方式,该作业车具有手动式的切换开关,该手动式的切换开关将所述转移检测部切换到工作状态和停止状态。
89.根据该方式,关于通过基于转移检测部的检测的车速控制部的减速控制而使行驶车体自动停止,能够切换到采用的状态和不采用的状态。
90.作为用于使本发明更优选的一个方式,该作业车具有通知部,该通知部向驾驶者通知所述减速控制的执行。
91.根据该方式,在通过车速控制部的减速控制而使车速降低的情况下,能够通过通知部向驾驶者通知该内容。
92.由此,能够避免在利用车速控制部的减速控制使车速降低时驾驶者感到不适的可能性。
93.作为用于使本发明更优选的一个方式,该作业车具有:存储有所述行驶车体从直线前进状态转移到方向转换状态的转换开始地点的地点存储部;以及判定所述行驶车体是
否到达所述转换开始地点的到达判定部,在所述到达判定部判定出所述行驶车体到达所述转换开始地点时,所述方向控制部执行使所述行驶车体自动地从当前的目标直线前进路线朝向下一目标直线前进路线转换方向的自动方向转换控制。
94.根据该方式,当行驶车体到达转换开始地点时,由于通过方向控制部的控制工作而使行驶车体自动地从当前的目标直线前进路线朝向下一目标直线前进路线转换方向,因此驾驶者不需要进行用于使行驶车体转换方向的操纵。
95.结果为,能够进一步减轻作业行驶时所需的驾驶者的工作。
96.作为用于使本发明更优选的一个方式,该作业车具有手动式的切换开关,该手动式的切换开关将所述方向控制部切换到执行所述自动方向转换控制的执行状态和不执行所述自动方向转换控制的停止状态,该作业车具有通知部,当在所述转换开始地点未存储于所述地点存储部的状态下所述方向控制部被切换到所述执行状态的情况下,该通知部向驾驶者通知所述转换开始地点未存储于所述地点存储部。
97.根据该方式,即使在通过切换开关将方向控制部切换到执行自动方向转换控制的执行状态下,如果转换开始地点未存储于地点存储部,则到达判定部无法判定行驶车体到达转换开始地点,由此,即使行驶车体到达转换开始地点,由于未通过方向控制部来执行自动方向转换控制,因此能够通过通知部向驾驶者通知该内容。
98.由此,驾驶者判定出行驶车体到达转换开始地点,伴随着行驶车体到达转换开始地点,能够使驾驶者认识到需要利用手动的方向转换操作使行驶车体从当前的目标直线前进路线朝向下一目标直线前进路线进行移动。
99.结果为,能够避免因驾驶者误以为转换开始地点已经存储于地点存储部、并伴随着行驶车体到达转换开始地点而由方向控制部执行自动方向转换控制所引起的以下情况:即使行驶车体到达转换开始地点,也不进行手动的方向转换操作。
附图说明
100.图1是乘用插秧机的左侧视图。
101.图2是示出乘用插秧机的传动结构和操纵结构等的概略俯视图。
102.图3是示出行驶用的传动结构的概略俯视图。
103.图4是示出作业用的传动结构的概略俯视图。
104.图5是示出主变速杆的操作路线等的主要部分的横剖俯视图。
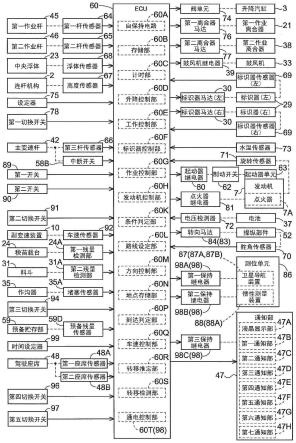
105.图6是示出控制结构的框图。
106.图7是示出与发动机的启动操作和停止操作等相关的电路结构的概略电路图。
107.图8是示出对绕转种植用的各作业行驶路线进行确保等的乘用插秧机的准备行驶阶段的俯视图。
108.图9是示出乘用插秧机的从绕转种植用的作业行驶路线到往复种植用的作业行驶路线的回旋移动之前状态的俯视图。
109.图10是示出乘用插秧机在往复种植用的作业行驶路线上的行驶状态的俯视图。
110.图11是示出乘用插秧机的从往复种植用的作业行驶路线到绕转种植用的作业行驶路线的回旋移动之前状态的俯视图。
111.符号说明
112.1 行驶车体
113.7 发动机
114.24 贮存部(秧苗载台)
115.24a 残量检测部(第一残量检测部)
116.31 贮存部(料斗)
117.31a 残量检测部(第二残量检测部)
118.35a 不良情况传感器(堵塞传感器)
119.37 电池
120.47 通知装置
121.47d 通知部(第三通知部)
122.47e 通知部(第四通知部)
123.47f 通知部(第五通知部)
124.47g 通知部(第六通知部)
125.47h 通知部(第七通知部)
126.48 驾驶座席
127.48a 第一座席传感器
128.48b 第二座席传感器
129.59 预备贮存部
130.59d 预备残量传感器
131.60g 作业控制部
132.60h 发动机控制部
133.60k 条件判定部
134.60l 路线设定部
135.60m 方向控制部
136.60n 地点存储部
137.60p 到达判定部
138.60q 车速控制部
139.60r 转移推定部
140.60s 转移检测部
141.61 主开关
142.70 推移检测部
143.86 测位单元
144.87 卫星导航装置
145.88 惯性测量装置
146.94 切换开关(第三切换开关)
147.96 切换开关(第四切换开关)
148.97 切换开关(第五切换开关)
149.98 通电保持部
150.a 对地作业装置
151.pc 转换开始地点
152.pd 转换开始地点
153.rs 目标直线前进路线
154.rsa 控制对象区域
具体实施方式
155.以下,作为用于实施本发明的方式的一例,根据附图说明将本发明应用于作为作业车的一例的乘用插秧机的实施方式。
156.另外,图1中记载的符号f的箭头所指示的方向是乘用插秧机的前侧,符号u的箭头所指示的方向是乘用插秧机的上侧。
157.另外,图2中记载的符号f的箭头所指示的方向是乘用插秧机的前侧,符号r的箭头所指示的方向是乘用插秧机的右侧。
158.如图1所示,本实施方式中例示的乘用插秧机具有:乘用型且四轮驱动形式的行驶车体1、以能够升降摆动的方式连结在行驶车体1的后部的平行四连杆形式的连杆机构2、对连杆机构2进行摆动驱动的液压式的升降汽缸3、以能够侧倾的方式连结在连杆机构2的后端部的八条垄用的秧苗插植装置(对地作业装置z的一例)4、以及从行驶车体1的后端部横跨到秧苗插植装置4的八条垄用的施肥装置(对地作业装置的一例)5等。
159.由此,乘用插秧机构成为能够进行最大八条垄的秧苗的栽插和施肥的中间架设施肥规格。另外,乘用插秧机能够根据升降汽缸3的工作而对秧苗插植装置4和施肥装置5的一部分进行升降驱动。
160.如图1~4所示,行驶车体1具有作为能够操纵的驱动轮的左右的前轮6a和作为不能操纵的驱动轮的左右的后轮6b以作为行驶装置6。行驶车体1在其前部上防振搭载有发动机7。来自发动机7的动力被带传动给主变速装置8,主变速装置8的变速后的动力在变速箱(以下,称为t/m箱)9的内部被分支成行驶用和作业用。行驶用的动力在t/m箱9的内部中经由副变速装置10被传递给前轮用的差速装置11。并且,行驶用的动力中的前轮驱动用的动力从前轮用的差速装置11经由左右的差速轴12等被传递给左右的前轮6a。另外,行驶用的动力中的后轮驱动用的动力借助于与前轮用的差速装置11一体旋转的传动齿轮13、从t/m箱9横跨到后车轴箱14的第一外部传动轴15以及内设于后车轴箱14的后轮用传动机构16等而被传递给左右的后轮6b。后轮用传动机构16具有使向左右的后轮6b的传动断续的左右的侧离合器17以及将后轮驱动用的动力减速传动到左右的后轮6b的减速单元18等。另一方面,作业用的动力借助于内设在t/m箱9中的单向离合器19、株距变速装置20、第一作业离合器21以及从t/m箱9横跨到秧苗插植装置4的第二外部传动轴22等被传递给秧苗插植装置4。
161.发动机7采用水冷式的汽油发动机。主变速装置8采用静液压式的无级变速装置。副变速装置10采用能够变速到作业行驶用的低速状态和移动行驶用的高速状态这高低两档的齿轮式的变速装置。左右的各侧离合器17采用多板式的摩擦离合器,具有将各侧离合器17恢复施力到连接状态的弹簧(未图示)。株距变速装置20采用能够进行六挡变速的齿轮式的变速装置。
162.如图1、图4和图6所示,秧苗插植装置4根据第一作业离合器21的断续操作而切换到利用来自行驶车体1的动力进行工作的工作状态以及来自行驶车体1的动力被切断而工
作停止的非工作状态。秧苗插植装置4具有五个整地浮体23、八条垄用的秧苗载台(贮存部的一例)24、横向进给机构(未图示)、带式的纵向进给机构25以及八基的插植机构26等。各整地浮体23伴随着它们接地的状态下的行驶车体1的行驶而在水田的泥面上滑走,以对秧苗栽插预定部位等泥面进行整地。秧苗载台24形成为能够载置八条垄的毯状秧苗。横向进给机构根据来自行驶车体1的动力而按照与毯状秧苗的左右宽度对应的一定的行程在左右方向上对秧苗载台24进行往复驱动。秧苗载台24每次到达左右的行程端时,纵向进给机构25使秧苗载台上的各毯状秧苗朝向秧苗载台24的下端按照规定的间距进行纵向进给。各插植机构26以旋转式按照与栽插条垄间对应的一定间隔被配置在左右方向上。并且,各插植机构26借助来自行驶车体1的动力从载置于秧苗载台24的各毯状秧苗的下端每次切取规定的量的秧苗,而栽插于整地后的泥土部。
163.由此,在秧苗插植装置4的工作状态下,能够从载置于秧苗载台24的毯状秧苗每次取出规定的量的秧苗而栽插于水田的泥土部。秧苗插植装置4的作业宽度w是使秧苗插植装置4的栽插条垄数与条垄间距离相乘而得到的长度。
164.如图1所示,秧苗插植装置4具有以能够相对旋转的方式横跨到该秧苗插植装置4的左右两端部的浮体支点轴27。各整地浮体23的后部侧以能够上下摆动的方式支承于从浮体支点轴27向后下方向延伸的五组支承臂28的自由端。
165.如图1、图6和图8~11所示,秧苗插植装置4具有在水田的泥面上形成行驶基准线的左右的标识器29以及在上下方向上对左右的标识器29进行摆动驱动的电动式的标识器马达30。左右的标识器29根据标识器马达30的工作而在沿着秧苗插植装置4立起的收纳姿势和从秧苗插植装置4向横向外侧伸出的作用姿势的范围中起伏摆动。并且,关于左右的标识器29,在收纳姿势下,标识器29的自由端所具有的行驶基准线形成用的旋转体29a从泥面分离。另外,关于左右的标识器29,在作用姿势下,旋转体29a穿入泥面,伴随着当前的行驶路线上的行驶,而在泥面上形成与当前的行驶路线相邻的行驶路线上所使用的行驶基准线l。
166.如图1和图6所示,施肥装置5具有横向较长的料斗(贮存部的一例)31、四基的送出机构32、电动式的鼓风机33、八根施肥软管34以及八个作沟器35等。料斗31贮存粒状或者粉状的肥料。各送出机构32利用借助于施肥用传动机构36所传递的动力进行工作。并且,各送出机构32通过该工作而从料斗31每次反复排出规定的量的两条垄的肥料。鼓风机33利用来自搭载于行驶车体1的电池37的电力进行工作。并且,鼓风机33通过该工作而产生搬运风,该搬运风使由各送出机构32所排出的肥料朝向水田的泥面进行搬运。各施肥软管34将搬运风所搬运的肥料引导到各作沟器35。各作沟器35配备于各整地浮体23。并且,各作沟器35与各整地浮体23一同升降,在各整地浮体23进行接地的作业行驶时,在水田的泥土部中形成施肥槽而将肥料引导到施肥槽内。
167.施肥装置5根据施肥用传动机构36所具有的第二作业离合器38的断续操作以及电气电路所具有的鼓风机继电器39的断续操作而切换到各送出机构32和鼓风机33进行工作的工作状态以及各送出机构32和鼓风机33停止工作的非工作状态。并且,在施肥装置5的工作状态下,能够每次取出规定的量的贮存于料斗31的肥料并埋入供给到水田的泥土内。
168.如图1~3和图6所示,行驶车体1在其后部侧具有驾驶部40。驾驶部40具有:前轮操纵用的方向盘41、能够进行主变速装置8的变速操作的主变速杆42、能够进行副变速装置10
的变速操作的副变速杆43、能够进行制动装置100的制动操作的制动踏板44、能够进行秧苗插植装置4的升降操作和工作状态的切换等的第一作业杆45和第二作业杆46、向驾驶者通知发动机转速等各种信息的通知装置47、以及从向前的基准位置以能够绕纵轴回旋的方式恢复施力到基准位置的驾驶座席48等。
169.制动踏板44自动恢复到踩踏解除位置。第一作业杆45采用能够向插植、下降、中立、上升、自动的各操作位置进行摆动操作的摆动式,且构成为能够在各操作位置上进行位置保持的位置保持型。第二作业杆46采用能够进行向上下方向和前后方向的摆动操作的十字摆动式且构成为中立恢复型。
170.通知装置47被配备在驾驶部40中的方向盘41的前方部位。通知装置47具有液晶显示部47a以及由led或者蜂鸣器等构成的多个通知部47b~47h等。
171.如图2所示,方向盘41经由借助于转向轴49与方向盘41一体转动的转向齿轮50、与转向齿轮50咬合连动的扇形齿轮51、与扇形齿轮51一体摆动的操纵部件52以及横跨操纵部件52和左右的前轮6a的操作臂53的左右的转向横拉杆54等而与左右的前轮6a连动连结。
172.行驶车体1具有与方向盘41的操作连动地对左右的侧离合器17进行断续操作的侧离合器操作机构55。侧离合器操作机构55具有以能够连动的方式连结操纵部件52和左右的侧离合器17的操作臂56的左右的联接杆57。左右的联接杆57在与操作臂56的联接部位具有设定操纵部件52的操作角度θ与左右的侧离合器17的断续操作的关系的长孔57a。
173.根据上述的结构,当驾驶者使方向盘41从直线前进位置向左方向转动操作时,操纵部件52根据其转动操作量而从直线前进位置(基准角度)θo向右方向摆动。由此,左右的前轮6a根据方向盘41的转动操作量而从直线前进位置向左回旋方向被操纵。另外,左右的侧离合器17在操纵部件52从直线前进位置θo到达右侧的第一设定角度θa为止的期间通过各侧离合器17的弹簧和各联接杆57的长孔57a的作用而被维持在连接状态。然后,当操纵部件52从右侧的第一设定角度θa摆动到第二设定角度θb时,左侧的侧离合器17与该摆动连动地因左侧的联接杆57和左侧的操作臂56的作用而从连接状态被切换到切断状态。另一方面,右侧的侧离合器17因右侧的侧离合器17的弹簧和右侧的联接杆57的长孔57a的作用而被维持在连接状态。由此,作为行驶车体1的方向转换状态,能够得到切断向位于回旋内侧的左侧的后轮6b的传动而使行驶车体1的回旋半径变小的左小回旋状态。
174.在该左小回旋状态中,当驾驶者将方向盘41朝向直线前进位置而向右方向转动操作时,操纵部件52根据该转动操作量而朝向直线前进位置θo向左方向摆动。由此,左右的前轮6a根据方向盘41的转动操作量而朝向直线前进位置被操纵。并且,当操纵部件52从右侧的第二设定角度θb摆动到第一设定角度θa时,左侧的侧离合器17与该摆动连动地因左侧的联接杆57和左侧的侧离合器17的弹簧的作用而从切断状态被切换到连接状态。另一方面,右侧的侧离合器17因右侧的侧离合器17的弹簧和右侧的联接杆57的长孔57a的作用而被维持在连接状态。然后,左右的侧离合器17在操纵部件52从右侧的第一设定角度θa到达直线前进位置θo为止的期间中因各侧离合器17的弹簧和各联接杆57的长孔57a的作用而被维持在连接状态。
175.相反,当驾驶者使方向盘41从直线前进位置向右方向转动操作时,操纵部件52根据该转动操作量而从直线前进位置(基准角度)θo向左方向摆动。由此,左右的前轮6a根据方向盘41的转动操作量而从直线前进位置向右回旋方向被操纵。另外,左右的侧离合器17
在操纵部件52从直线前进位置θo到达左侧的第一设定角度θa为止的期间中因各侧离合器17的弹簧和各联接杆57的长孔57a的作用而被维持在连接状态。然后,当操纵部件52从左侧的第一设定角度θa摆动到第二设定角度θb时,右侧的侧离合器17与该摆动连动地因右侧的联接杆57和右侧的操作臂56的作用而从连接状态被切换到切断状态。另一方面,左侧的侧离合器17因左侧的侧离合器17的弹簧和左侧的联接杆57的长孔57a的作用而被维持在连接状态。由此,作为行驶车体1的方向转换状态,能够得到切断向位于回旋内侧的右侧的后轮6b的传动而使行驶车体1的回旋半径变小的右小回旋状态。
176.在该右小回旋状态中,当驾驶者使方向盘41朝向直线前进位置而向左方向转动操作时,操纵部件52根据该转动操作量而朝向直线前进位置θo向右方向摆动。由此,左右的前轮6a根据方向盘41的转动操作量而朝向直线前进位置被操纵。并且,当操纵部件52从左侧的第二设定角度θb摆动到第一设定角度θa时,右侧的侧离合器17与该摆动连动地因右侧的联接杆57和右侧的侧离合器17的弹簧的作用而从切断状态被切换到连接状态。另一方面,左侧的侧离合器17因左侧的侧离合器17的弹簧和左侧的联接杆57的长孔57a的作用而被维持在连接状态。然后,左右的侧离合器17在操纵部件52从左侧的第一设定角度θa到达直线前进位置θo为止的期间中因各侧离合器17的弹簧和各联接杆57的长孔57a的作用而被维持在连接状态。
177.如图8~11所示,在该乘用插秧机中,作为上述的左右的小回旋状态下的回旋半径基本上被设定为能够得到秧苗插植装置4的作业宽度w的一半的长度。由此,在进行所谓的田埂边回旋的情况下,驾驶者进行操纵以使得作为行驶车体1的方向转换状态能够得到左右任意的小回旋状态,由此能够简便地进行田埂边回旋,所谓的田埂边回旋是指:例如在往复种植的秧苗插植作业中,结束当前的作业行驶路线r1a~r1d上的栽插行驶,在田埂边的方向转换区域中使行驶车体1朝向与当前的作业行驶路线r1a~r1d相邻的下一作业行驶路线r1b~r1e进行方向转换。
178.如图1、图5和图6所示,主变速杆42在方向盘41的左侧相邻配备。主变速杆42构成为能够进行沿着导引板58的导引槽58a的摆动操作的摆动式。主变速杆42构成为能够在制动机构(未图示)的中立位置、前进5挡各变速位置和后退3挡各变速位置上进行位置保持的位置保持型。
179.导引槽58a具有:作为主变速杆42的中立位置的左右方向的前进后退切换路线58a、从前进后退切换路线58a的右端部向前方延伸的前进变速路线58b、从前进后退切换路线58a的左端部向后方延伸的后退变速路线58c以及从前进后退切换路线58a的左端向左方延伸的辅助路线58d。并且,辅助路线58d的左端部被设定在作业中断位置58e。
180.导引板58具有:对主变速杆42向作业中断位置58e的操作进行检测的中断开关58b;以及能够将主变速杆42保持在作业中断位置58e的保持件58c。中断开关58b能采用限位开关或者接近开关等。
181.主变速杆42借助于主变速用的机械式联接机构(未图示)而与主变速装置8的操作轴(未图示)联接。在主变速杆42被操作到前进后退切换路线58a时,主变速装置8切换到中立状态。在主变速杆42被操作到前进变速路线58b上的任意的变速位置时,主变速装置8切换到与主变速杆42的变速位置对应的前进变速状态。在主变速杆42被操作到后退变速路线58c上的任意的变速位置时,主变速装置8切换到与主变速杆42的操作位置对应的后退变速
状态。
182.如图1所示,副变速杆43在驾驶座席48的左侧相邻配备。副变速杆43采用前后摆动式且构成为能够在作业行驶用的低速位置和移动行驶用的高速位置上保持位置切换的位置保持型。副变速杆43借助于副变速用的机械式联接机构(未图示)而与副变速装置10的操作轴(未图示)联接。在副变速杆43被操作到低速位置时,副变速装置10被切换到作业行驶用的低速状态,在副变速杆43被操作到高速位置时,副变速装置10被切换到移动行驶用的高速状态。
183.行驶车体1具有贮存预备的毯状秧苗的预备贮存部59。预备贮存部59具有:从行驶车体1中的前部的左右两端部向上方延伸的主视观察为倒u字状的支承框架59a;以及被支承于支承框架59a的左右两侧部上的左右各四枚预备秧苗台59b等。
184.由此,在预备贮存部59中作为预备的毯状秧苗能够将八枚毯状秧苗分成左右各四枚而进行贮存。
185.如图6和图7所示,行驶车体1具有控制车载的电子产品的电子控制单元(以下,称为ecu)60。ecu60由具有cpu和eeprom等的微处理器构成。ecu60和各电子产品借助于can(controller area network:控制器区域网络)等车内通信或者电力线等而被连接为能够通信或者能够送电。
186.如图7所示,该乘用插秧机具有使从电池37向ecu60等各电子产品的通电断续的手动式的主开关61。主开关61采用驾驶部40中所具有的按键操作式,能够切换到“断开”位置、“导通”位置和“开启”位置,并且在“断开”位置和“导通”位置上能够保持位置,从“开启”位置被恢复施力到“导通”位置。
187.如图6和图7所示,ecu60根据主开关61的从断开位置向导通位置的连接操作所得到的来自电池37的通电而起动。在利用主开关61的从导通位置向断开位置的切断操作来切断来自电池37的通电时,ecu60根据其内部所具有的自保持电路60a而维持通电状态。并且,ecu60将进行了主开关61的切断操作的阶段中的发动机7的总运转时间和各种设定信息等写入非易失性的存储部60b中。另外,ecu60与主开关61的切断操作连动地开始进行在其内部所具有的计时部60c的计时,当在进行主开关61的切断操作之后起直到经过了设定时间为止的期间中未进行主开关61的连接操作的情况下,停止自保持电路60a的通电而停止工作。
188.主开关61借助于由开闭开关构成的制动开关62而与发动机启动用的起动器单元63连接。制动开关62与制动踏板44向制动位置的踩踏操作连动地从断开状态切换到闭合状态,并与制动踏板44从制动位置起的踩踏解除操作连动地从闭合状态切换到断开状态。
189.由此,在启动发动机7的情况下,驾驶者对制动踏板44进行向制动位置的踩踏操作,由此能够经由了主开关61从电池37向起动器单元63通电,在该状态下进行主开关61向开启位置的发动机启动操作,由此能够利用起动器单元63的工作使发动机7启动。
190.如图1、图2和图6所示,行驶车体1具有:检测第一作业杆45在前后方向上的操作位置的第一杆传感器64、检测第二作业杆46向上下方向和前后方向的操作的第二杆传感器65、检测主变速杆42在前后方向上的操作位置的第三杆传感器66、将连杆机构2的上下摆动角度作为秧苗插植装置4的高度位置而检测的高度传感器67、检测左右中央的整地浮体(以下,称为中央浮体)23的上下摆动角度的浮体传感器68、检测左右的标识器29向收纳姿势和
作用姿势的切换的左右的标识器传感器69、将操纵部件52距离直线前进位置θo的摆动操作角度作为前轮6a的舵角而检测的舵角传感器70、检测发动机7的输出转速的旋转传感器71、检测电池37的电压的电压检测器72以及检测发动机冷却水的温度的水温传感器73等。
191.第一杆传感器64、第三杆传感器66、高度传感器67、浮体传感器68以及舵角传感器70可以采用旋转式的电位计或者旋转编码器等。第二杆传感器65可以采用具有多触点开关或者多个限位开关的限位开关单元等。左右的标识器传感器69可以采用限位开关单元、或者接近开关单元等,其中,上述限位开关单元具有检测标识器29切换到收纳姿势的限位开关和检测标识器29切换到作用姿势的限位开关,上述接近开关单元具有检测标识器29切换到收纳姿势的接近开关和检测标识器29切换到作用姿势的接近开关。旋转传感器71可以采用电磁拾取式等。
192.如图6所示,ecu60具有控制升降汽缸3的工作而使秧苗插植装置4升降的升降控制部60d。升降控制部60d通过控制升降用的阀单元74的工作而控制升降汽缸3的工作,该升降用的阀单元74控制油相对于升降汽缸3的流动。
193.如图1和图6所示,在对第一作业杆45被进行了人为操作的情况下,升降控制部60d执行根据第一杆传感器64和高度传感器67的输出而使秧苗插植装置4升降的第一升降控制。
194.以下,对第一升降控制中的升降控制部60d的控制工作进行说明。
195.当根据第一杆传感器64的输出而检测出第一作业杆45操作到上升位置时,升降控制部60d进行使秧苗插植装置4上升的上升处理。在上升处理中,升降控制部60d通过将阀单元74切换到向升降汽缸3供给油的供给状态,而使升降汽缸3进行收缩工作从而使秧苗插植装置4上升。
196.当根据第一杆传感器64的输出而检测出第一作业杆45操作到下降位置时,升降控制部60d进行使秧苗插植装置4下降的下降处理。在下降处理中,升降控制部60d通过将阀单元74切换到从升降汽缸3排出油的排出状态而使升降汽缸3进行伸长工作从而使秧苗插植装置4下降。
197.当根据第一杆传感器64的输出而检测出第一作业杆45操作到中立位置时,升降控制部60d进行使秧苗插植装置4停止在此时的高度位置上的升降停止处理。在升降停止处理中,升降控制部60d通过将阀单元74切换到停止油相对于升降汽缸3供给排出的供给排出停止状态,而停止升降汽缸3的伸缩工作从而停止秧苗插植装置4。
198.当在上述的上升处理的执行过程中根据高度传感器67的输出而检测出秧苗插植装置4到达上限位置时,升降控制部60d通过进行上述的升降停止处理而使秧苗插植装置4停止在上限位置。
199.当在上述的下降处理的执行过程中根据高度传感器67的输出而检测出秧苗插植装置4到达下限位置时,升降控制部60d通过进行上述的升降停止处理而使秧苗插植装置4停止在下限位置。
200.即,根据基于第一杆传感器64的输出的升降控制部60d的控制工作,由驾驶者进行第一作业杆45的操作,由此能够使秧苗插植装置4升降移动到上限位置与下限位置之间的任意的高度位置。
201.在根据第一杆传感器64的输出而检测出第一作业杆45操作到自动位置的情况下,
升降控制部60d执行根据第二杆传感器65、高度传感器67以及浮体传感器68的输出而使秧苗插植装置4升降的第二升降控制。
202.以下,对第二升降控制中的升降控制部60d的控制工作进行说明。
203.当根据第二杆传感器65的输出而检测出第二作业杆46向下方操作时,升降控制部60d进行使秧苗插植装置4下降到与中央浮体23的控制目标角度对应的作业高度位置的自动下降处理,当根据浮体传感器68的输出而检测出秧苗插植装置4到达作业高度位置时,开始进行将秧苗插植装置4维持在作业高度位置上的自动升降处理。在自动下降处理中,升降控制部60d进行上述的下降处理,直到根据浮体传感器68的输出而检测出中央浮体23的上下摆动角度与控制目标角度一致(浮体传感器68的输出收敛在控制目标角度的死区宽度内)为止。在自动升降处理中,升降控制部60d通过控制阀单元74的工作而使升降汽缸3进行伸缩工作以维持浮体传感器68的输出与控制目标角度一致的状态,从而将秧苗插植装置4维持在作业高度位置。
204.当根据第二杆传感器65的输出而检测出第二作业杆46向上方操作时,升降控制部60d结束自动升降处理,并进行使插植装置4上升到上限位置的自动上升处理。在自动上升处理中,升降控制部60d进行上述的上升处理,直到根据高度传感器67的输出而检测出秧苗插植装置4到达上限位置为止,当检测出秧苗插植装置4到达上限位置时,升降控制部60d进行上述的升降停止处理而使秧苗插植装置4停止在上限位置。
205.即,在第一作业杆45位于自动位置的状态下,根据基于第二杆传感器65的输出的升降控制部60d的控制工作,由驾驶者进行第二作业杆46的操作,由此能够使秧苗插植装置4自动地升降移动到上限位置或者作业高度位置,从而能够将秧苗插植装置4维持在上限位置或者作业高度位置。
206.由此,在使秧苗插植装置4位于作业高度位置的作业行驶时,与因水田的耕盘的起伏等引起的行驶车体1的俯仰无关,能够将秧苗插植装置4维持在与中央浮体23的控制目标角度对应的作业高度位置。
207.另外,秧苗插植装置4的作业高度位置(中央浮体23的控制目标角度)能够根据配备于驾驶部40的作业高度用的设定器75的人为操作而任意地设定变更。设定器75可以采用旋转式的电位计等。
208.如图6所示,ecu60具有将秧苗插植装置4和施肥装置5切换到工作状态和停止状态的工作控制部60e。工作控制部60e通过对使第一作业离合器21进行断续操作的电动式的第一离合器马达76、使第二作业离合器38进行断续操作的电动式的第二离合器马达77以及鼓风机继电器39的工作进行控制,而将秧苗插植装置4和施肥装置5切换到工作状态和停止状态。
209.如图1和图6所示,在对第一作业杆45进行了人为操作的情况下,工作控制部60e执行根据第一杆传感器64和浮体传感器68的输出而将秧苗插植装置4和施肥装置5切换到工作状态和停止状态的第一工作切换控制。
210.以下,对第一工作切换控制中的工作控制部60e的控制工作进行说明。
211.在根据第一杆传感器64的输出而检测出第一作业杆45从中立位置操作到下降位置之后,根据浮体传感器68的输出而检测出中央浮体23的接地,此时,工作控制部60e进行使鼓风机33启动的鼓风机启动处理。在鼓风机启动处理中,工作控制部60e向鼓风机继电器
39通电,将鼓风机继电器39切换到允许从电池37向鼓风机33通电的闭合状态,由此启动鼓风机33。
212.然后,当根据第一杆传感器64的输出而检测出第一作业杆45操作到插植位置时,工作控制部60e进行将秧苗插植装置4和施肥装置5从停止状态切换到工作状态的工作开始处理。在工作开始处理中,工作控制部60e通过控制第一离合器马达76和第二离合器马达77的工作而将第一作业离合器21和第二作业离合器38从断开状态切换到接通状态,从而将秧苗插植装置4和施肥装置5从停止状态切换到工作状态。
213.然后,当在秧苗插植装置4和施肥装置5的工作状态下根据第一杆传感器64的输出而检测出第一作业杆45从插植位置操作到下降位置时,工作控制部60e进行使鼓风机33停止的鼓风机停止处理和使秧苗插植装置4和施肥装置5从工作状态切换到停止状态的工作停止处理。在鼓风机停止处理中,工作控制部60e通过停止向鼓风机继电器39通电而将鼓风机继电器39切换到阻止从电池37向鼓风机33通电的断开状态,从而停止鼓风机33。在工作停止处理中,工作控制部60e通过控制第一离合器马达76和第二离合器马达77的工作而将第一作业离合器21和第二作业离合器38从接通状态切换到断开状态,从而将秧苗插植装置4和施肥装置5从工作状态切换到停止状态。
214.即,根据基于第一杆传感器64的输出的工作控制部60e的控制工作,驾驶者进行第一作业杆45的操作,由此能够将秧苗插植装置4和施肥装置5切换到工作状态和停止状态。
215.在根据第一杆传感器64的输出而检测出第一作业杆45操作到自动位置的情况下,工作控制部60e执行根据第二杆传感器65的输出等将秧苗插植装置4和施肥装置5切换到工作状态和停止状态的第二工作切换控制。
216.以下,对第二工作切换控制中的工作控制部60e的控制工作进行说明。
217.当在根据第一杆传感器64的输出而检测出第一作业杆45操作到自动位置之后、或者在根据第二杆传感器65的输出而检测出第二作业杆46向上方操作之后,根据第二杆传感器65的输出而检测出第二作业杆46向下方的第一次操作时,工作控制部60e进行上述的鼓风机启动处理。然后,当根据第二杆传感器65的输出而检测出第二作业杆46向下方的第二次操作时,伴随着根据浮体传感器68的输出而检测出秧苗插植装置4到达作业高度位置,进行上述的工作开始处理。
218.当在秧苗插植装置4和施肥装置5的工作状态下根据第二杆传感器65的输出而检测出第二作业杆46向上方操作时,工作控制部60e进行上述的鼓风机停止处理和工作停止处理。
219.即,在第一作业杆45位于自动位置的状态下,根据基于第二杆传感器65的输出的工作控制部60e的控制工作,驾驶者进行第二作业杆46的操作,由此能够将秧苗插植装置4和施肥装置5切换到工作状态和停止状态。
220.如图6所示,ecu60具有将左右的标识器29切换到收纳姿势和作用姿势的标识器控制部60f。标识器控制部60f通过控制左右的标识器马达30的工作而将左右的标识器29切换到收纳姿势和作用姿势。
221.如图1和图6所示,在对第二作业杆46进行了人为操作的情况下,标识器控制部60f执行根据第二杆传感器65、浮体传感器68以及左右的标识器传感器69的输出而将左右的标识器29切换到收纳姿势和作用姿势的标识器切换控制。
222.以下,对标识器切换控制中的标识器控制部60f的控制工作进行说明。
223.当根据第二杆传感器65的输出而检测出第二作业杆46从中立位置向左方操作时,标识器控制部60f根据浮体传感器68的输出而判定秧苗插植装置4是否下降到作业高度位置。并且,在秧苗插植装置4下降到作业高度位置的情况下,标识器控制部60f立刻进行将左侧的标识器29切换到作用姿势的左标识器伸出处理。另外,在秧苗插植装置4未下降到作业高度位置的情况下,标识器控制部60f伴随着检测出秧苗插植装置4下降到作业高度位置而进行左标识器伸出处理。在左标识器伸出处理中,标识器控制部60f使左侧的标识器马达30进行正转工作,直到左侧的标识器传感器69检测出左侧的标识器29切换到作用姿势为止。
224.当根据第二杆传感器65的输出而检测出第二作业杆46从中立位置向右方操作时,标识器控制部60f根据浮体传感器68的输出而判定秧苗插植装置4是否下降到作业高度位置。并且,在秧苗插植装置4下降到作业高度位置的情况下,标识器控制部60f立刻进行将右侧的标识器29切换到作用姿势的右标识器伸出处理。另外,在秧苗插植装置4未下降到作业高度位置的情况下,标识器控制部60f伴随着检测出秧苗插植装置4下降到作业高度位置而进行右标识器伸出处理。在右标识器伸出处理中,标识器控制部60f使右侧的标识器马达30进行正转工作,直到右侧的标识器传感器69检测出右侧的标识器29切换到作用姿势。
225.当在将左右任意的标识器29切换到作用姿势的状态下根据浮体传感器68的输出而检测出秧苗插植装置4浮起时,标识器控制部60f进行将作用姿势的标识器29切换到收纳姿势的标识器收纳处理。在标识器收纳处理中,标识器控制部60f使与作用姿势的标识器29对应的标识器马达30进行倒转工作,直到与作用姿势的标识器29对应的标识器传感器69检测出标识器29切换到收纳姿势为止。
226.即,根据基于第二杆传感器65、浮体传感器68以及左右的标识器传感器69的输出的标识器控制部60f的控制工作,驾驶者进行第二作业杆46的操作,由此能够在秧苗插植装置4的接地状态下将左右的标识器29切换到作用姿势。另外,根据基于浮体传感器68和左右的标识器传感器69的输出的标识器控制部60f的控制工作,能够使作用姿势的标识器29伴随着秧苗插植装置4的浮起而自动地切换到收纳姿势。
227.如图2、图5和图6所示,ecu60具有作业控制部60g,该作业控制部60g根据中断开关58b或者舵角传感器70的检测而将秧苗插植装置4和施肥装置5切换到作业状态和非作业状态。作业控制部60g通过向升降控制部60d、工作控制部60e以及标识器控制部60f输出控制指令而将秧苗插植装置4和施肥装置5切换到作业状态和非作业状态。
228.与中断开关58b检测出主变速杆42移动到作业中断位置58e连动地,作业控制部60g执行将秧苗插植装置4和施肥装置5切换到非作业状态的第一非作业状态切换控制,另外,与中断开关58b检测出主变速杆42从作业中断位置58e移动连动地,作业控制部60g执行将秧苗插植装置4和施肥装置5切换到作业状态的第一作业状态切换控制。
229.首先,对第一非作业状态切换控制中的作业控制部60g的控制工作进行说明。
230.当在秧苗插植装置4和施肥装置5的作业状态下根据中断开关58b的检测而检测出主变速杆42移动到作业中断位置58e时,作业控制部60g根据左右的标识器传感器69的输出而判定左右任意的标识器29是否处于作用姿势,将该判定结果存储于存储部60b。另外,根据第一杆传感器64的输出而判定第一作业杆45的操作位置是插植位置还是自动位置。
231.如果第一作业杆45的操作位置是插植位置,则向升降控制部60d指令上述的自动
上升处理的执行,向工作控制部60e指令上述的鼓风机停止处理和工作停止处理的执行,并向标识器控制部60f指令上述的标识器收纳处理的执行。
232.如果第一作业杆45的操作位置是自动位置,则除了上述的插植位置处的控制工作之外,还向升降控制部60d指令上述的自动升降处理的结束。
233.由此,与主变速杆42摆动操作到作业中断位置58e连动地,能够使秧苗插植装置4和施肥装置5自动地切换到如下的非作业状态:秧苗插植装置4位于上限位置,秧苗插植装置4和施肥装置5处于停止状态,左右的标识器29处于收纳姿势。
234.接着,对第一作业状态切换控制中的作业控制部60g的控制工作进行说明。
235.当在秧苗插植装置4和施肥装置5的非作业状态下根据中断开关58b的检测而检测出主变速杆42从作业中断位置58e移动时,作业控制部60g根据第一杆传感器64的输出而判定第一作业杆45的操作位置是插植位置还是自动位置。
236.如果第一作业杆45的操作位置是插植位置,则向升降控制部60d指令上述的自动下降处理的执行,然后,当根据浮体传感器68的输出而检测出中央浮体23接地时,向工作控制部60e指令上述的鼓风机启动处理的执行。然后,当根据浮体传感器68的输出而检测出秧苗插植装置4到达作业高度位置时,向工作控制部60e指令上述的工作开始处理的执行,另外,向标识器控制部60f指令用于使在存储部60b中存储为作用姿势的左右一方的标识器29恢复到作用姿势的上述的右标识器伸出处理或者左标识器伸出处理的执行。
237.如果第一作业杆45的操作位置是自动位置,则除了上述的插植位置处的控制工作之外,还在检测出秧苗插植装置4到达作业高度位置时向升降控制部60d指令上述的自动升降处理的执行。
238.由此,与主变速杆42从作业中断位置58e起的摆动操作连动地,能够将秧苗插植装置4和施肥装置5自动地切换到如下的作业状态:秧苗插植装置4位于作业高度位置,秧苗插植装置4和施肥装置5处于工作状态,与作业中断前的作业行驶时处于作用姿势的左右任意的标识器29相同的一侧的标识器29处于作用姿势。
239.即,当在秧苗栽插作业中需要进行向秧苗插植装置4的秧苗补给或者向施肥装置5的肥料补给等辅助作业的情况下,驾驶者一边进行基于主变速杆42向中立位置的操作或制动踏板44的踩踏操作等的行驶停止操作,一边将主变速杆42操作到作业中断位置58e,由此能够使行驶车体1行驶停止,并且能够将秧苗插植装置4和施肥装置5从作业状态切换到非作业状态。
240.由此,驾驶者能够快速地从驾驶状态转移到进行秧苗补给或者肥料补给等辅助作业的辅助作业状态。并且,由于在秧苗插植装置4的非作业状态下,秧苗插植装置4上升到上限位置而使秧苗载台24接近驾驶部40,因此,驾驶者容易进行从驾驶部40对秧苗载台24的秧苗补给。
241.并且,当结束辅助作业时,驾驶者如果使主变速杆42从作业中断位置58e经由中立位置而操作到前进变速路线58b,则能够与主变速杆42从作业中断位置58e操作到中立位置连动地,将秧苗插植装置4和施肥装置5从非作业状态切换到与作业中断前相同的作业状态,能够与从主变速杆42的中立位置操作到前进变速路线58b连动地,使行驶车体1前进行驶并且能够对秧苗插植装置4和施肥装置5进行驱动。
242.由此,驾驶者能够以简便的操作且快速地再次开始进行辅助作业的作业中断后的
秧苗栽插作业。
243.作业控制部60g根据配备于驾驶部40的手动式的第一切换开关78的操作而切换到执行状态和非执行状态,在上述执行状态中,执行基于舵角传感器70的检测的控制工作,在上述非执行状态中,不执行基于舵角传感器70的检测的控制工作。第一切换开关78能采用肘节开关或者按钮开关等。
244.舵角传感器70将操纵部件52从直线前进位置θo摆动到右侧的第二设定角度θb检测为行驶车体1从直线前进状态转移到左小回旋状态(方向转换状态的一例),并将操纵部件52从右侧的第二设定角度θb摆动到第一设定角度θa检测为行驶车体1从左小回旋状态转移到直线前进状态。另外,舵角传感器70将操纵部件52从直线前进位置θo摆动到左侧的第二设定角度θb检测为行驶车体1从直线前进状态转移到右小回旋状态(方向转换状态的一例),并将操纵部件52从左侧的第二设定角度θb摆动到第一设定角度θa检测为行驶车体1从右小回旋状态转移到直线前进状态。
245.即,舵角传感器70作为对行驶车体1的行驶状态的推移进行检测的推移检测部而发挥功能。
246.作业控制部60g在该执行状态下,与舵角传感器70检测出行驶车体1从直线前进状态转移到小回旋状态连动地,执行将秧苗插植装置4和施肥装置5切换到非作业状态的第二非作业状态切换控制,另外,与舵角传感器70检测行驶车体1从小回旋状态转移到直线前进状态连动地,执行将秧苗插植装置4和施肥装置5切换到作业状态的第二作业状态切换控制。
247.首先,对第二非作业状态切换控制中的作业控制部60g的控制工作进行说明。
248.当在秧苗插植装置4和施肥装置5的作业状态等时根据舵角传感器70的检测而检测出行驶车体1从直线前进状态转移到左小回旋状态或者右小回旋状态时,作业控制部60g根据第一杆传感器64的输出而判定第一作业杆45的操作位置是插植位置还是自动位置。
249.如果第一作业杆45的操作位置是插植位置,则向升降控制部60d指令上述的自动上升处理的执行,向工作控制部60e指令上述的鼓风机停止处理和工作停止处理的执行,并向标识器控制部60f指令上述的标识器收纳处理的执行。
250.如果第一作业杆45的操作位置是自动位置,则除了上述的插植位置处的控制工作之外,还向升降控制部60d指令上述的自动升降处理的结束。
251.由此,能够与行驶车体1从直线前进状态转移到左小回旋状态或者右小回旋状态连动地,将秧苗插植装置4和施肥装置5自动地切换到上述的非作业状态。
252.接着,对第二作业状态切换控制中的作业控制部60g的控制工作进行说明。
253.当在秧苗插植装置4和施肥装置5的非作业状态下根据舵角传感器70的检测而检测出行驶车体1从左小回旋状态或者右小回旋状态转移到直线前进状态时,作业控制部60g根据第一杆传感器64的输出而判定第一作业杆45的操作位置是插植位置还是自动位置。
254.如果第一作业杆45的操作位置是插植位置,则向升降控制部60d指令上述的自动下降处理的执行,然后,当根据浮体传感器68的输出而检测出中央浮体23接地时,向工作控制部60e指令上述的鼓风机启动处理的执行。然后,当根据浮体传感器68的输出而检测出秧苗插植装置4到达作业高度位置时,向工作控制部60e指令上述的工作开始处理的执行,向标识器控制部60f指令用于将与行驶车体1的回旋方向相反侧的标识器29切换到作用姿势
的上述的右标识器伸出处理或者左标识器伸出处理的执行。
255.如果第一作业杆45的操作位置是自动位置,则除了上述的插植位置处的控制工作之外,还在检测出秧苗插植装置4到达作业高度位置时向升降控制部60d指令上述的自动升降处理的执行。
256.由此,能够与行驶车体1从左小回旋状态或者右小回旋状态转移到直线前进状态连动地,将秧苗插植装置4和施肥装置5自动地切换到如下的作业状态:秧苗插植装置4位于作业高度位置,秧苗插植装置4和施肥装置5处于工作状态,与田埂边回旋前的作业行驶时处于作用姿势的左右任意的标识器29相反侧的标识器29处于作用姿势。
257.即,在进行基于往复种植的秧苗插植作业的情况下,驾驶者如果对第一切换开关78进行操作而将作业控制部60g切换到执行状态,则在田埂边,仅通过进行用于使行驶车体1在田埂边回旋的操纵,就能够伴随着田埂边回旋的开始而使秧苗插植装置4和施肥装置5从作业状态切换到非作业状态,另外,能够伴随着田埂边回旋的结束,使秧苗插植装置4和施肥装置5从非作业状态切换到适于下一作业行驶路线r1a~r1e处的作业的作业状态。
258.如图5~7所示,ecu60具有对发动机7的工作进行控制的发动机控制部60h以及判定发动机7的临时停止条件和再启动条件是否成立的条件判定部60k。
259.发动机控制部60h在条件判定部60k判定出发动机7的临时停止条件成立时,执行使发动机7临时停止的发动机临时停止控制。另外,发动机控制部60h在条件判定部60k判定出发动机7的再启动条件成立时,执行使发动机7再启动的发动机再启动控制。
260.发动机控制部60h通过在发动机临时停止控制和发动机再启动控制中控制起动器继电器80和点火器继电器81的工作而进行发动机7的临时停止操作或者再启动操作,该起动器继电器80能够绕过主开关61地从电池37向起动器单元63通电,该点火器继电器81使从电池37对发动机7的点火器7a的通电断续。
261.起动器继电器80与主开关61同样,借助于制动开关62与起动器单元63连接。由此,与主开关61对发动机7的启动操作同样,在基于发动机控制部60h的发动机再启动控制的发动机7的再启动操作中,驾驶者必须对制动踏板44的制动位置进行踩踏操作。
262.条件判定部60k在中断开关58b检测出主变速杆42移动到作业中断位置58e之后,例如如果处于确保了发动机7的输出转速为设定转速(例如怠速转速)以下、电池37的电压为设定值以上以及发动机冷却水的温度为设定值(例如55度)以上等适于发动机7的再启动的条件的状态,则判定出发动机7的临时停止条件成立,除此之外判定出发动机7的临时停止条件不成立。另外,条件判定部60k在中断开关58b未检测出主变速杆42从作业中断位置58e移动的期间,判定出发动机7的再启动条件不成立,当中断开关58b检测出主变速杆42从作业中断位置58e移动时,判定出发动机7的再启动条件成立。
263.条件判定部60k根据旋转传感器71的输出而判定发动机7的输出转速是否为设定转速以下。条件判定部60k根据电压检测器72的输出而判定电池37的电压是否为设定值以上。条件判定部60k根据水温传感器73的输出而判定发动机冷却水的温度是否为设定值以上。
264.以下,对发动机临时停止控制中的发动机控制部60h的控制工作进行说明。
265.当根据条件判定部60k的判定而检测出发动机7的临时停止条件成立时,发动机控制部60h使装备于通知装置47的由led构成的第一通知部47b点亮,并且向点火器继电器81
通电,将点火器继电器81切换到停止从电池37向点火器7a通电的断开状态,由此使发动机7临时停止。
266.由此,在驾驶者为了进行例如秧苗补给或肥料补给等辅助作业而使行驶车体1行驶停止的情况下,一边进行基于主变速杆42向中立位置的操作或制动踏板44的踩踏操作等的行驶停止操作,一边将主变速杆42操作到作业中断位置58e,由此能够使发动机7临时停止,其结果为,能够防止在进行秧苗补给或肥料补给等辅助作业的期间中因发动机7还连续运转而导致的多余的燃料消耗。
267.另外,即使主变速杆42被操作到作业中断位置58e,在上述的临时停止条件未成立时,也不进行发动机7的临时停止操作,因此,能够避免例如因在电池37的电压小于设定值时或发动机冷却水的温度小于设定值时发动机7临时停止而引起产生发动机7的再启动操作很费工夫等不良情况的可能性。
268.并且,驾驶者能够根据第一通知部47b的状态而容易地判别发动机7是否因主变速杆42操作到作业中断位置58e而临时停止。
269.接着,对发动机再启动控制中的发动机控制部60h的控制工作进行说明。
270.当根据条件判定部60k的判定而检测出发动机7的再启动条件成立时,发动机控制部60h伴随着该检测而进行发动机再启动处理。
271.在发动机再启动处理中,首先,停止向点火器继电器81通电、并将点火器继电器81切换到从电池37向点火器7a通电的闭合状态,由此允许发动机7的启动。接着,向起动器继电器80通电、并将起动器继电器80切换到从电池37向起动器单元63通电的闭合状态,由此通过绕过主开关61地从电池37向起动器单元63通电而使起动器单元63进行工作从而使发动机7再启动。
272.在进行了发动机再启动处理之后,根据旋转传感器71的输出而判定发动机7的输出转速是否为设定转速以上,如果小于设定转速,则判断为发动机7未再启动而再次进行发动机再启动处理。如果为设定转速以上,则判断为完成了发动机7的再启动而使第一通知部47b熄灭。
273.由此,驾驶者在结束了辅助作业之后,一边进行向制动踏板44的制动位置的踩踏操作,一边将主变速杆42从作业中断位置58e操作到中立位置,由此能够使发动机7简便地再启动。
274.并且,驾驶者根据第一通知部47b的状态,能够容易地判别是否通过使主变速杆42从作业中断位置58e操作到中立位置而使发动机7再启动。
275.如图2和图6所示,行驶车体1具有能够使左右的前轮6a进行自动操纵的自动操纵单元83。自动操纵单元83具有电动式的转向马达84和将来自转向马达84的动力向转向轴49传动的齿轮机构85等。
276.如图1和图6所示,行驶车体1具有测定其位置和方位的测位单元86。测位单元86包括卫星导航装置87和惯性测量装置(imu:inertial measurement unit)88,上述卫星导航装置87利用作为全地球导航卫星系统(gnss:global navigation satellite system)的一例的公知的gps(global positioning system:全地球定位系统)来测定行驶车体1的位置和方位,上述惯性测量装置(imu:inertial measurement unit)88具有三轴的陀螺仪(未图示)和3方向的加速度传感器(未图示)来测量行驶车体1的倾角、间距角以及固定角。
277.卫星导航装置87支承于位于行驶车体1的最上部的预备贮存部59的上端部分59c,以使得gps天线87a对于来自卫星的电波的接收灵敏度变高。因此,卫星导航装置87的测位结果包含因行驶车体1的倾斜导致的gps天线87a的位置偏移而引起的测位误差。因此,在该乘用插秧机中具有惯性测量装置88,以校正因行驶车体1的倾斜导致的gps天线87a的位置偏移等而引起的卫星导航装置87的测位误差。
278.另外,也可以通过具有卫星导航装置87和惯性测量装置,例如根据从卫星导航装置87得到的行驶车体1的绝对位置而校正从惯性测量装置88得到的行驶车体1的相对位置所包含的累积误差。
279.即,能够通过具有卫星导航装置87和惯性测量装置而高精度地测定行驶车体1的位置和方位。
280.另外,惯性测量装置88配备于具有较高的刚性的后车轴箱14的左右中央部位。
281.如图6和图8~11所示,ecu60具有设定目标直线前进路线rs的路线设定部60l以及控制行驶车体1的行驶方向的方向控制部60m。
282.当对驾驶部40所具有的示教用的第一开关89和第二开关90进行按压操作时,路线设定部60l根据该操作而执行决定行驶车体1在水田上进行往复种植时的基准方位的示教控制。
283.以下,对示教控制中的路线设定部60l的控制工作进行说明。
284.当在移动行驶中检测出第一开关89的按压操作时,路线设定部60l将此时得到的测位单元86的测定结果登记为示教始端位置pta。
285.接着,当在移动行驶中检测出第二开关90的按压操作时,将此时得到的测位单元86的测定结果登记为示教终端位置ptb。
286.并且,将通过登记的示教始端位置pta和示教终端位置ptb的直线的延伸方向决定为上述的基准方位ro并写入存储部60b中。
287.由此,驾驶者例如在为了在田埂边确保绕转种植用的各作业行驶路线r2a~r2d而进行的作业行驶开始前的准备行驶阶段中,在沿着往复种植用的作业行驶路线r1a~r1e的绕转种植用的作业行驶路线r2a、r2c上的直线前进行驶时,进行第一开关89和第二开关90的按压操作,使路线设定部60l执行示教控制,由此容易地得到适于作业对象的水田的基准方位ro。
288.另外,第一开关89和第二开关90可以采用瞬时开关等。
289.路线设定部60l根据主变速杆42所具有的手动式的第二切换开关91的操作而切换到执行状态和非执行状态,在上述执行状态中,执行设定目标直线前进路线rs的目标路线设定控制,在上述非执行状态中,不执行设定目标直线前进路线rs的目标路线设定控制。第二切换开关91可以采用瞬时开关或两个位置切换式的肘节开关等。
290.当在目标路线设定控制的执行状态下由舵角传感器70检测出行驶车体1从直线前进状态转移到小回旋状态时,路线设定部60l根据该检测而在与刚要回旋之前的直线前进路线正交的方向上分离了设定距离(例如,与秧苗插植装置4的作业宽度w对应的距离)的回旋方向侧的位置,设定沿着被写入在存储部60b中的基准方位ro的目标直线前进路线rs。
291.方向控制部60m在路线设定部60l所设定的目标直线前进路线rs的控制对象区域rsa中,执行根据目标直线前进路线rs和测位单元86的测位结果等而使行驶车体1自动地在
目标直线前进路线rs上行驶的自动直线前进控制。
292.以下,对自动直线前进控制中的方向控制部60m的控制工作进行说明。
293.方向控制部60m首先根据目标直线前进路线rs和测位单元86的测位结果,将行驶车体1的当前位置相对于目标直线前进路线rs的偏移量和偏移方向以及行驶车体1的当前方位相对于目标直线前进路线rs的偏移角和偏移方向作为偏移信息而求出。
294.接着,根据所求出的偏移信息、将副变速装置10的输出转速检测为车速的车速传感器92的输出以及存储在存储部60b中的自动直线前进控制用的校正数据来决定左右的前轮6a的控制目标舵角。
295.然后,根据所决定的控制目标舵角以及舵角传感器70的输出来控制转向马达84的工作,以使左右的前轮6a的舵角成为控制目标舵角。
296.即,在目标直线前进路线rs的控制对象区域rsa中,由于行驶车体1根据方向控制部60m的自动直线前进控制而自动地在目标直线前进路线rs上行驶,因此驾驶者不需要进行操纵以使行驶车体1不会从目标直线前进路线rs偏离。结果为,能够减轻作业行驶时所需的驾驶者的工作。
297.伴随着路线设定部60l根据第二切换开关91的操作而切换到目标路线设定控制的执行状态,方向控制部60m切换到能够执行自动直线前进控制的功能状态,并且使装备于通知装置47的由led构成的第二通知部47c闪烁。另外,伴随着路线设定部60l根据第二切换开关91的操作而切换到目标路线设定控制的非执行状态,方向控制部60m切换到不执行自动直线前进控制的停止状态并且使第二通知部47c熄灭。
298.另外,车速传感器92能采用电磁拾取式等。自动直线前进控制用的校正数据能采用表示行驶车体1的当前位置相对于目标直线前进路线rs的偏移量和偏移方向、行驶车体1的车速与左右的前轮6a的控制目标舵角的关系的比特数据或者关系式、以及表示行驶车体1的当前方位相对于目标直线前进路线rs的偏移角和偏移方向、行驶车体1的车速与左右的前轮6a的控制目标舵角的关系的比特数据或者关系式等。
299.如图6和图11所示,方向控制部60m执行自动直线前进控制的目标直线前进路线rs的控制对象区域rsa是从实际行驶区域rsc去除了手动行驶区域rsb而得到的区域,其中,上述实际行驶区域rsc是目标直线前进路线rs上的从行驶开始地点pa到行驶结束地点pb的区域,上述手动行驶区域rsb是行驶车体1从目标直线前进路线rs上的行驶开始地点pa到自动直线前进控制的执行条件成立为止所行驶的区域。行驶开始地点pa是方向控制部60m根据舵角传感器70的检测而检测出行驶车体1从小回旋状态转移到直线前进状态的地点。行驶结束地点pb是方向控制部60m根据舵角传感器70的检测而检测出行驶车体1从直线前进状态转移到小回旋状态的地点。在根据由路线设定部60l设定的目标直线前进路线rs和测位单元86的测定结果而检测出行驶车体1的当前位置相对于目标直线前进路线rs的偏移量以及行驶车体1的当前方位相对于目标直线前进路线rs的偏移角从允许范围外变化到允许范围内时,方向控制部60m判定为自动直线前进控制的执行条件成立。
300.因此,当在田埂边回旋后、配备于行驶车体1中的前端部的左右中央部位处的中心标识器93的位置与标识器29中所形成的行驶基准线l大幅位置偏移的情况下,驾驶者判断为上述的偏移量和偏移角处于允许范围外,并且为了使自动直线前进控制的执行条件成立,需要进行操作方向盘41而操纵左右的前轮6a的手动校正操纵,以使得上述的偏移量和
偏移角收敛在允许范围内,具体而言能够得到从落座位置观察到中心标识器93的视线之前行驶基准线l笔直地延伸的状态。
301.因此,为了使这样的驾驶者的修正操作变得容易,当在该功能状态下根据来自工作控制部60e或者作业控制部60g的信息而检测出行驶车体1到达行驶开始地点pa时,方向控制部60m执行根据由路线设定部60l设定的目标直线前进路线rs和测位单元86的测定结果而判定自动直线前进控制的执行条件是否成立的判定控制。并且,当在该判定控制中判定出执行条件不成立的情况下,将第二通知部47c维持在闪烁状态而向驾驶者通知自动直线前进控制的执行条件不成立。在判定出执行条件成立的情况下,将第二通知部47c从闪烁状态切换到点亮状态而向驾驶者通知方向控制部60m处于自动直线前进控制的执行状态。
302.由此,在伴随着田埂边回旋的结束而使第二通知部47c从闪烁状态切换到点亮状态的情况下,驾驶者能够掌握伴随着田埂边回旋的结束而执行了自动直线前进控制。另外,当在田埂边回旋的结束后第二通知部47c还持续着闪烁状态的情况下,驾驶者能够掌握上述的偏移量和偏移角处于允许范围外而需要进行上述的手动校正操纵。并且,当第二通知部47c根据手动校正操纵而从闪烁状态切换到点亮状态时,能够掌握上述的偏移量和偏移角处于允许范围内而执行了自动直线前进控制。
303.接着,根据图6和图8~11,对在矩形状的水田中使用作业控制部60g、路线设定部60l以及方向控制部60m等的控制工作来进行秧苗栽插作业的情况的一例进行说明。
304.(1)驾驶者在作业行驶开始前进行用于在田埂边确保绕转种植用的各作业行驶路线r2a~r2d的准备行驶。在该准备行驶中,驾驶者在沿着往复种植用的各作业行驶路线r1a~r1e的绕转种植用的各作业行驶路线r2a、r2c上的直线前进行驶开始时,通过第一作业杆45或者第二作业杆46的操作使秧苗插植装置4下降到作业高度位置,并且通过第二作业杆46的操作将往复种植区域侧的标识器29切换到作用姿势。由此,能够在泥面上形成有往复种植用的初次的作业行驶路线r1a和最终的作业行驶路线r2e上的在行驶时能够使用的行驶基准线l。
305.(2)驾驶者在与往复种植用的初次的作业行驶路线r1a相邻的绕转种植用的作业行驶路线r2a上的直线前进行驶中,首先利用第一开关89的操作使路线设定部60l对示教始端位置pta进行登记,在从该登记起直线前进行驶了设定距离之后,利用第二开关90的操作使路线设定部60l对示教终端位置ptb进行登记。于是,路线设定部60l执行上述的示教控制,由此能够得到适于该水田上的往复种植的基准方位ro。
306.(3)驾驶者在该绕转种植用的作业行驶路线r2a上的直线前进行驶中,利用第一切换开关78的操作将作业控制部60g切换到上述的执行状态。另外,利用第二切换开关91的操作将路线设定部60l切换到目标路线设定控制的执行状态,并且将方向控制部60m切换到功能状态。于是,此时,由于方向控制部60m处于上述的自动直线前进控制的可执行状态,因此第二通知部47c闪烁。
307.(4)当行驶车体1按照该绕转种植用的作业行驶路线r2a上的直线前进行驶而到达田埂边的方向转换区域时,驾驶者进行田埂边回旋操作(180度的方向转换操作),该田埂边回旋操作用于使行驶车体1从绕转种植用的作业行驶路线r2a移动到相邻的往复种植用的初次的作业行驶路线r1a。于是,舵角传感器70检测出行驶车体1从直线前进状态转移到小回旋状态,作业控制部60g根据该检测而执行上述的第二非作业状态切换控制,而使秧苗插
植装置4上升到上限位置,并且将作用姿势的标识器29切换到收纳姿势。另外,路线设定部60l执行目标路线设定控制,在与绕转种植用的作业行驶路线r2a正交的方向上分离了设定距离(这里为与秧苗插植装置4的作业宽度w对应的距离)的回旋方向侧的位置上设定沿着上述的基准方位ro的目标直线前进路线rs。
308.(5)当利用该田埂边回旋操作使行驶车体1接近往复种植用的初次的作业行驶路线r1a(目标直线前进路线rs)的行驶开始地点pa时,驾驶者结束田埂边回旋操作,以得到行驶车体1在往复种植用的初次的作业行驶路线r1a上直线前进行驶的状态。于是,舵角传感器70检测到行驶车体1从小回旋状态转移到直线前进状态,作业控制部60g根据该检测而执行上述的第二作业状态切换控制。
309.由此,与行驶车体1从田埂边回旋状态转移到直线前进状态连动地,秧苗插植装置4和施肥装置5从上述的非作业状态切换到上述的作业状态,乘用插秧机从移动行驶状态切换到作业行驶状态。另外,方向控制部60m根据此时的舵角传感器70的检测而检测出行驶车体1到达行驶开始地点pa,伴随着该检测而执行上述的判定控制。
310.(6)当在该判定控制中方向控制部60m判定出自动直线前进控制的执行条件不成立时,在持续该判定的期间第二通知部47c维持闪烁状态,因此根据该情况,驾驶者进行上述的手动校正操纵以使得行驶车体1位于往复种植用的初次的作业行驶路线r1a上(上述的偏移量和偏移角收敛在允许范围内)。
311.另外,当在该判定控制中方向控制部60m判定出自动直线前进控制的执行条件成立时,这之后处于上述的控制对象区域rsa,因此方向控制部60m开始自动直线前进控制,并且第二通知部47c从闪烁状态切换到点亮状态。于是,根据方向控制部60m的自动直线前进控制而使行驶车体1自动地在往复种植用的初次的作业行驶路线r1a(目标直线前进路线rs)上行驶,由此驾驶者不需要进行操纵以使行驶车体1不会从往复种植用的初次的作业行驶路线r1a上偏离。
312.(7)当行驶车体1按照该往复种植用的初次的作业行驶路线r1a上的直线前进行驶而到达田埂边的方向转换区域时,驾驶者进行用于使行驶车体1从当前的作业行驶路线r1a移动到相邻的下一作业行驶路线r1b的田埂边回旋操作。于是,舵角传感器70检测出行驶车体1从直线前进状态转移到小回旋状态,作业控制部60g根据该检测而执行上述的第二非作业状态切换控制。另外,路线设定部60l执行目标路线设定控制,而在与当前的作业行驶路线r1a正交的方向上分离了设定距离的回旋方向侧的位置设定沿着上述的基准方位ro的目标直线前进路线rs。
313.此外,方向控制部60m检测出行驶车体1到达当前的作业行驶路线r1a上的行驶结束地点pb而结束上述的自动直线前进控制,并且第二通知部47c从点亮状态切换到闪烁状态。由此,与行驶车体1从直线前进状态转移到田埂边回旋状态连动地,秧苗插植装置4和施肥装置5从上述的作业状态切换到上述的非作业状态,乘用插秧机从作业行驶状态切换到移动行驶状态。
314.(8)当利用该田埂边回旋操作而使行驶车体1接近下一作业行驶路线r1b的行驶开始地点pa时,驾驶者在这以后的往复行驶路线上依次适当地进行上述的(5)~(7)的操作,直到行驶车体1按照往复种植用的最终的作业行驶路线r1e上的直线前进行驶而到达田埂边的方向转换区域为止。
315.即,在往复行驶路线上的目标直线前进路线rs的控制对象区域rsa中,执行自动直线前进控制而使行驶车体1自动地在目标直线前进路线rs上行驶,另外,在方向转换区域中,与驾驶者的田埂边回旋操作连动地适当执行第二非作业状态切换控制和第二作业状态切换控制,而在适当的时机将秧苗插植装置4和施肥装置5切换到非作业状态和作业状态。
316.结果为,能够在不会导致作业效率的降低的情况下有效地减轻作业行驶时所需的驾驶者的工作,并且良好地进行往复行驶路线上的秧苗的栽插和施肥。
317.(9)然后,当行驶车体1按照往复种植用的最终的作业行驶路线r1e上的直线前进行驶而到达田埂边的方向转换区域时,驾驶者利用第二切换开关91的操作将路线设定部60l切换到上述的非执行状态,并且将方向控制部60m切换到停止状态。另外,进行用于使行驶车体1从往复种植用的最终的作业行驶路线r1e移动到相邻的绕转种植用的作业行驶路线r2c的田埂边回旋操作。于是,作业控制部60g根据此时的舵角传感器70的检测而执行上述的第二非作业状态切换控制,由此乘用插秧机从作业行驶状态切换到移动行驶状态。并且,驾驶者在此时的田埂边回旋中利用第一切换开关78的操作将作业控制部60g切换到上述的非执行状态。于是,即使之后为了使行驶车体1按照绕转种植用的作业行驶路线r2c行驶而由驾驶者结束田埂边回旋操作,乘用插秧机也维持移动行驶状态。
318.由此,驾驶者能够使乘用插秧机从往复种植用的最终的作业行驶路线r1e朝向绕转种植用的初次的作业行驶路线r2a快速地移动。
319.(10)并且,在向绕转种植用的初次的作业行驶路线r2a移动之后,驾驶者一边手动地使行驶车体1按照绕转种植用的各作业行驶路线r2a~r2d行驶,一边利用第一作业杆45或者第二作业杆46的操作进行适于绕转种植的秧苗插植装置4和施肥装置5的作业状态和非作业状态的切换。
320.如图6所示,行驶车体1具有:检测秧苗载台24上的毯状秧苗的残量的第一残量检测部24a、检测料斗31上的肥料的残量的第二残量检测部31a、以及作为与作业相关的不良情况而检测各作沟器35的内部中的肥料堵塞的堵塞传感器(不良情况传感器的一例)35a。第一残量检测部24a采用检测对应的毯状秧苗的残量降低到秧苗补给用的设定值的八个限位开关。第二残量检测部31a采用检测肥料的残量降低到肥料补给用的设定值的透射型光电传感器。堵塞传感器35a具有在各作沟器内隔开规定的间隔而配置的一对电极,因在一对电极间供水的肥料附着而感测出两电极间的通电从而检测肥料堵塞。
321.通知装置47具有:向驾驶者通知载置于秧苗载台24的任意的毯状秧苗的残量降低到秧苗补给用的设定量的由led构成的第三通知部47d、向驾驶者通知贮存于料斗31的肥料的残量降低到肥料补给用的设定值的由led构成的第四通知部47e、以及向驾驶者通知在任意的作沟器35中产生肥料堵塞的由led构成的第五通知部47f。
322.当根据第一残量检测部24a的输出而检测出载置于秧苗载台24的任意的毯状秧苗的残量降低到秧苗补给用的设定值时,作业控制部60g将秧苗补给通知用的第三通知部47d从熄灭状态切换到闪烁状态。由此,能够促使驾驶者向秧苗载台24补给毯状秧苗。然后,在第三通知部47d的闪烁状态下,当根据第一残量检测部24a的输出而检测出载置于秧苗载台24的所有的毯状秧苗的残量超过秧苗补给用的设定值时,使第三通知部47d从闪烁状态切换到熄灭状态。
323.当根据第二残量检测部31a的输出而检测出贮存于料斗31的肥料的残量降低到肥
料补给用的设定值时,作业控制部60g将肥料补给通知用的第四通知部47e从熄灭状态切换到闪烁状态。由此,能够促使驾驶者向料斗31补给肥料。然后,在第四通知部47e的闪烁状态下,当根据第二残量检测部31a的输出而检测出贮存于料斗31的肥料的残量超过了肥料补给用的设定值时,将第四通知部47e从闪烁状态切换到熄灭状态。
324.当根据堵塞传感器35a的输出而检测出在任意的作沟器35中产生了肥料堵塞时,作业控制部60g将堵塞通知用的第五通知部47f从熄灭状态切换到闪烁状态。由此,能够促使驾驶者去除堵塞在作沟器35中的肥料。然后,在第五通知部47f的闪烁状态下,当根据堵塞传感器35a的输出而检测出各作沟器35中的肥料堵塞被解除时,使第五通知部47f从闪烁状态切换到熄灭状态。
325.驾驶者当在各作业行驶路线r1a~r1e、r2a~r2d上的作业行驶中视觉确认了第三通知部47d、第四通知部47e或者第五通知部47f的闪烁时,能够从落座于驾驶座席48而操作方向盘41等的驾驶状态转移到如下的辅助作业状态(其他的作业状态的一例):从驾驶座席48离开,向秧苗载台24进行秧苗补给、向料斗31进行肥料补给、或者将堵塞在作沟器35中的肥料去除等。
326.接着,根据图6和图7,对在各作业行驶路线r1a~r1e、r2a~r2d上的作业行驶中驾驶者需要从驾驶状态转移到辅助作业状态的情况进行说明。
327.(1)驾驶者当视觉确认了第三通知部47d、第四通知部47e、或者第五通知部47f的闪烁时,首先一边进行基于主变速杆42向中立位置的操作或制动踏板44的踩踏操作等的行驶停止操作,一边将主变速杆42操作到作业中断位置58e。于是,根据这些操作而使行驶车体1行驶停止,并且作业控制部60g执行上述的第一非作业状态切换控制,根据该第一非作业状态切换控制而使秧苗插植装置4和施肥装置5从作业状态切换到非作业状态。另外,条件判定部60k判定发动机7的临时停止条件的成立或者不成立,在判定出成立时,发动机控制部60h执行上述的发动机临时停止控制,根据该发动机临时停止控制使发动机7临时停止并且使第一通知部47b点亮。
328.即,当在各作业行驶路线r1a~r1e、r2a~r2d上的作业行驶中需要从驾驶状态转移到辅助作业状态的情况下,驾驶者仅通过进行行驶停止操作并且将主变速杆42操作到作业中断位置58e,就能够将乘用插秧机从作业行驶状态切换到行驶停止状态,并且能够使发动机7临时停止。
329.由此,驾驶者能够快速地从驾驶状态转移到辅助作业状态,并且能够一边防止在辅助作业中燃料被多余地消耗一边进行辅助作业。并且,在秧苗插植装置4的非作业状态下,由于通过使秧苗插植装置4上升到上限位置而使秧苗载台24接近驾驶部40,因此驾驶者容易进行从驾驶部40对秧苗载台24的秧苗补给。
330.(2)当结束秧苗补给或者肥料补给等辅助作业时,驾驶者一边进行向制动踏板44的制动位置的踩踏操作,一边将主变速杆42从作业中断位置58e操作到中立位置。于是,作业控制部60g根据该操作而执行上述的第一作业状态切换控制,根据该第一作业状态切换控制而使秧苗插植装置4和施肥装置5从非作业状态切换到与辅助作业开始前相同的作业状态。另外,在发动机7临时停止的情况下,发动机控制部60h执行上述的发动机再启动控制,根据该发动机再启动控制而使发动机7再运转并且使第一通知部47b熄灭。然后,驾驶者当进行向制动踏板44的制动解除位置的恢复操作和从主变速杆42的中立位置向前进变速
路线58b的操作时,行驶车体1开始进行前进行驶,对秧苗插植装置4和施肥装置5进行驱动。
331.即,驾驶者当结束秧苗补给或者肥料补给而再次开始在作业行驶路线r1a~r1e、r2a~r2d上的作业行驶的情况下,在进行了向制动踏板44的制动位置的踩踏操作和从主变速杆42的作业中断位置58e向中立位置的操作之后,仅通过进行向制动踏板44的制动解除位置的恢复操作和从主变速杆42的中立位置向前进变速路线58b的操作,就能够将乘用插秧机从行驶停止状态切换到作业行驶状态。
332.当在上述的自动直线前进控制的执行过程中执行发动机临时停止控制时,方向控制部60m中断自动直线前进控制,并且当在自动直线前进控制的中断过程中执行发动机再启动控制时,方向控制部60m再次开始自动直线前进控制。
333.由此,在使用了方向控制部60m的自动直线前进控制的往复种植用的作业行驶路线r1a~r1e上的作业行驶中,需要进行辅助作业,由此驾驶者将主变速杆42操作到作业中断位置58e,当发动机控制部60h根据该操作而执行发动机临时停止控制时,由于方向控制部60m与其连动地中断自动直线前进控制,因此在为了进行辅助作业而使发动机7临时停止的行驶停止状态下也能够防止因持续自动直线前进控制而导致的多余的电力消耗。
334.然后,当驾驶者结束辅助作业而将主变速杆42从作业中断位置58e操作到中立位置时,发动机控制部60h根据该操作而执行发动机再启动控制,由于方向控制部60m与其连动地再次开始自动直线前进控制,因此在作业行驶的再次开始后,也能够根据方向控制部60m的自动直线前进控制而使行驶车体1自动地在目标直线前进路线rs上行驶。
335.如图6和图8~11所示,ecu60具有:存储行驶车体1从直线前进状态转移到田埂边回旋状态(180度的方向转换状态)的转换开始地点p的地点存储部60n;以及判定行驶车体1是否到达转换开始地点p的到达判定部60p。
336.地点存储部60n在根据舵角传感器70的输出和测位单元86的测位结果而检测出舵角传感器70从行驶车体1的直线前进状态转移到左小回旋状态或者右小回旋状态时,将根据测位单元86的测位结果而得到的从行驶车体1的直线前进状态转移到左小回旋状态或者右小回旋状态的转移开始地点存储为左转换开始地点pc或者右转换开始地点pd。到达判定部60p执行如下的设定判定控制:根据存储于地点存储部60n的左转换开始地点pc或者右转换开始地点pd而设定往复种植用的当前的作业行驶路线r1a~r1e上的转换开始地点pc、pd,根据所设定的转换开始地点pc、pd和测位单元86的测位结果而判定行驶车体1是否到达往复种植用的当前的作业行驶路线r1a~r1e上的转换开始地点pc、pd。
337.在到达判定部60p判定出行驶车体1到达左转换开始地点pc或者右转换开始地点pd时,方向控制部60m执行使行驶车体1自动地从往复种植中的当前的作业行驶路线r1a~r1d(目标直线前进路线rs)朝向下一作业行驶路线r1b~r1e(目标直线前进路线rs)进行方向转换(田埂边回旋)的自动方向转换控制。
338.以下,对自动方向转换控制中的方向控制部60m的控制工作进行说明。
339.当根据到达判定部60p的判定结果而检测出行驶车体1到达左转换开始地点pc时,方向控制部60m进行控制转向马达84的工作的左方向转换处理以得到行驶车体1的左小回旋状态,并且开始进行计时部60c的计时。
340.然后,在从左方向转换处理的开始经过了直到行驶车体1完成田埂边回旋(180度的方向转换)为止所需的规定的时间时,伴随着该经过而进行控制转向马达84的工作以得
到行驶车体1的直线前进状态的直线前进恢复处理。
341.相反,当根据到达判定部60p的判定结果而检测出行驶车体1到达右转换开始地点pd时,进行控制转向马达84的工作以得到行驶车体1的右小回旋状态的右方向转换处理,并且开始进行计时部60c的计时。
342.然后,当从右方向转换处理的开始经过了直到行驶车体1完成田埂边回旋为止所需的规定的时间时,伴随着该经过而进行上述的直线前进恢复处理。
343.即,在田埂边的方向转换区域中,能够根据方向控制部60m的自动方向转换控制而使行驶车体1自动地在田埂边回旋,由此能够进一步减轻在进行往复种植的秧苗插植作业的情况下所需的驾驶者的工作。
344.方向控制部60m根据配备于驾驶部40的手动式的第三切换开关94的操作而切换到执行自动方向转换控制的执行状态和不执行自动方向转换控制的非执行状态。伴随着方向控制部60m根据第三切换开关94的操作而切换到自动方向转换控制的执行状态,到达判定部60p切换到执行设定判定控制的执行状态。另外,伴随着方向控制部60m根据第三切换开关94的操作而切换到自动方向转换控制的非执行状态,到达判定部60p切换到不执行设定判定控制的非执行状态。第三切换开关94可以采用肘节开关或者按钮开关等。
345.当在行驶车体1的左转换开始地点pc和右转换开始地点pd未存储于地点存储部60n的状态下被切换到执行自动方向转换控制的执行状态的情况下,方向控制部60m使配备于通知装置47的由蜂鸣器构成的第六通知部47g进行间歇工作,并向驾驶者通知左转换开始地点p和右转换开始地点p未存储于地点存储部60n。
346.接着,对在矩形状的水田中使用作业控制部60g、路线设定部60l、方向控制部60m、地点存储部60n以及到达判定部60p等的控制工作来进行秧苗栽插作业的情况下的一例进行说明。
347.另外,这里,上述的示教控制结束,从完成了作业控制部60g向上述的执行状态的切换、路线设定部60l向上述的执行状态的切换、方向控制部60m向上述的功能状态和执行状态的切换以及到达判定部60p向上述的执行状态的切换等的阶段开始进行说明。
348.(1)在与往复种植用的初次的作业行驶路线r1a相邻的绕转种植用的作业行驶路线r2a上的直线前进行驶中,由于行驶车体1的左转换开始地点pc和右转换开始地点pd未存储于地点存储部60n中,因此第六通知部47g进行间歇工作,并向驾驶者通知左转换开始地点pc和右转换开始地点pd未存储于地点存储部60n中。由此,当在绕转种植用的作业行驶路线r2a上的直线前进行驶中行驶车体1到达田埂边的方向转换区域时,驾驶者进行用于使行驶车体1从绕转种植用的作业行驶路线r2a向左侧移动到相邻的往复种植用的初次的作业行驶路线r1a的向左方向的田埂边回旋操作。于是,舵角传感器70检测出行驶车体1从直线前进状态转移到左小回旋状态,作业控制部60g根据该检测而执行上述的第二非作业状态切换控制,而使秧苗插植装置4上升到上限位置,并且将作用姿势的标识器29切换到收纳姿势。另外,路线设定部60l执行目标路线设定控制,在与绕转种植用的作业行驶路线r2a正交的方向上分离了设定距离的回旋方向侧的位置设定沿着上述的基准方位ro的目标直线前进路线rs。并且,地点存储部60n将绕转种植用的作业行驶路线r2a上的直线前进行驶的行驶结束地点pb存储为左转换开始地点pc。
349.(2)当利用该左田埂边回旋操作使行驶车体1接近往复种植用的初次的作业行驶
路线r1a的行驶开始地点pa时,驾驶者结束左田埂边回旋操作,以得到行驶车体1在往复种植用的初次的作业行驶路线r1a上进行直线前进行驶的状态。于是,舵角传感器70检测出行驶车体1从左小回旋状态转移到直线前进状态,作业控制部60g根据该检测而执行上述的第二作业状态切换控制,而使乘用插秧机从移动行驶状态切换到作业行驶状态。另外,方向控制部60m根据此时的舵角传感器70的检测而检测出行驶车体1到达行驶开始地点pa从而执行上述的判定控制。
350.(3)当在该判定控制中方向控制部60m判定出自动直线前进控制的执行条件不成立时,在持续该判定的期间第二通知部47c维持闪烁状态,因此根据该情况,驾驶者进行上述的手动校正操纵以使得行驶车体1位于往复种植用的初次的作业行驶路线r1a上。
351.另外,当在该判定控制中方向控制部60m判定自动直线前进控制的执行条件的成立时,这之后处于上述的控制对象区域rsa,因此方向控制部60m开始自动直线前进控制,并且第二通知部47c从闪烁状态切换到点亮状态。于是,根据方向控制部60m的自动直线前进控制而使行驶车体1自动地在往复种植用的初次的作业行驶路线r1a上行驶,由此,驾驶者不需要进行操纵以使行驶车体1不会从往复种植用的初次的作业行驶路线r1a上偏离。
352.然而,在此时的自动直线前进控制中,由于在地点存储部60n中未存储有右转换开始地点pd,因此第六通知部47g持续进行间歇工作,并向驾驶者通知右转换开始地点pd未存储于地点存储部60n。
353.(4)当行驶车体1按照该往复种植用的初次的作业行驶路线r1a上的直线前进行驶而到达田埂边的方向转换区域时,驾驶者根据第六通知部47g的间歇工作而进行用于使行驶车体1从当前的作业行驶路线r1a向右侧移动到相邻的下一作业行驶路线r1b的右田埂边回旋操作。于是,舵角传感器70检测出行驶车体1从直线前进状态转移到右小回旋状态,作业控制部60g根据该检测而执行上述的第二非作业状态切换控制,而将乘用插秧机从作业行驶状态切换到移动行驶状态。另外,路线设定部60l执行目标路线设定控制,在与该当前的作业行驶路线r1a正交的方向上分离了设定距离的回旋方向侧的位置设定沿着上述的基准方位ro的目标直线前进路线rs。此外,方向控制部60m检测出行驶车体1到达当前的作业行驶路线r1a上的行驶结束地点pb而结束上述的自动直线前进控制,并且第二通知部47c从点亮状态切换到闪烁状态。并且,地点存储部60n将该当前的作业行驶路线r1a的直线前进行驶中的行驶结束地点pb存储为右转换开始地点pd,由此,第六通知部47g停止间歇工作。
354.(5)当利用该右田埂边回旋操作而使行驶车体1接近下一作业行驶路线r1b的行驶开始地点pa时,驾驶者结束右田埂边回旋操作以得到行驶车体1在作业行驶路线r1b上直线前进行驶的状态。于是,舵角传感器70检测出行驶车体1从右小回旋状态转移到直线前进状态,作业控制部60g根据该检测而执行上述的第二作业状态切换控制,将乘用插秧机从移动行驶状态切换到作业行驶状态。另外,方向控制部60m根据此时的舵角传感器70的检测而检测出行驶车体1到达行驶开始地点pa从而执行上述的判定控制,根据该判定控制等与上述(3)的记载同样地进行驾驶者的手动校正操纵或者方向控制部60m的自动直线前进控制等。
355.(6)并且,在这以后的自动直线前进控制中,由于在地点存储部60n中存储有绕转种植用的作业行驶路线r2a上的左转换开始地点pc和往复种植用的作业行驶路线r1a上的右转换开始地点pd,因此到达判定部60p根据这些转换开始地点pc、pd而在以后的作业行驶路线r1b~r1e上执行上述的设定判定控制。另外,每次到达判定部60p判定出行驶车体1到
达各转换开始地点pc、pd时,方向控制部60m结束上述的自动直线前进控制而执行上述的自动方向转换控制。并且,每次执行自动方向转换控制时,舵角传感器70检测出行驶车体1从直线前进状态转移到小回旋状态,作业控制部60g根据该检测而执行上述的第二非作业状态切换控制从而将乘用插秧机从作业行驶状态切换到移动行驶状态,路线设定部60l执行目标路线设定控制而设定下一目标直线前进路线rs,第二通知部47c从点亮状态切换到闪烁状态。并且,当经过了上述的田埂边回旋用的规定的时间时,方向控制部60m结束基于自动方向转换控制的田埂边回旋操作以得到行驶车体1的直线前进状态。于是,舵角传感器70检测出行驶车体1从小回旋状态转移到直线前进状态,作业控制部60g根据该检测而执行上述的第二作业状态切换控制从而将乘用插秧机从移动行驶状态切换到作业行驶状态。另外,方向控制部60m根据此时的舵角传感器70的检测而检测出行驶车体1到达行驶开始地点pa从而执行上述的判定控制,根据该判定控制等而与上述(3)的记载同样地进行驾驶者的手动校正操纵或者方向控制部60m的自动直线前进控制等。
356.即,当在矩形状的水田中进行往复种植的秧苗栽插作业的情况下使用作业控制部60g、路线设定部60l、方向控制部60m、地点存储部60n以及到达判定部60p等的控制工作时,如果在地点存储部60n中存储有左转换开始地点pc和右转换开始地点pd,则除了在基于自动方向转换控制的田埂边回旋后上述的自动直线前进控制的执行条件未成立的期间以及需要进行秧苗补给或肥料补给等辅助作业时之外,驾驶者不需要对乘用插秧机进行操纵。
357.结果为,能够大幅减轻作业行驶时所需的驾驶者的工作。
358.(7)然后,当在往复种植用的最终的作业行驶路线r1e上进行自动直线前进控制的直线前进行驶时,驾驶者利用第三切换开关94的操作将方向控制部60m和到达判定部60p切换到上述的非执行状态。并且,当行驶车体1到达田埂边的方向转换区域时,驾驶者利用第二切换开关91的操作将路线设定部60l切换到上述的非执行状态,并且将方向控制部60m切换到上述的停止状态。另外,进行用于使行驶车体1从往复种植用的最终的作业行驶路线r1e移动到相邻的绕转种植用的作业行驶路线r2c的田埂边回旋操作。于是,作业控制部60g根据此时的舵角传感器70的检测而执行上述的第二非作业状态切换控制从而将乘用插秧机从作业行驶状态切换到移动行驶状态。并且,驾驶者在此时的田埂边回旋中利用第一切换开关78的操作将作业控制部60g切换到上述的非执行状态。于是,即使然后驾驶者为了使行驶车体1在绕转种植用的作业行驶路线r2c上行驶而结束田埂边回旋操作,乘用插秧机也维持移动行驶状态。
359.由此,驾驶者能够使乘用插秧机从往复种植用的最终的作业行驶路线r1e朝向绕转种植用的初次的作业行驶路线r2a快速地移动。
360.(8)并且,在移动到绕转种植用的初次的作业行驶路线r2a之后,驾驶者一边手动地使行驶车体1在绕转种植用的各作业行驶路线r2a~r2d上行驶,一边利用第一作业杆45或者第二作业杆46的操作进行适于绕转种植的秧苗插植装置4和施肥装置5的作业状态和非作业状态的切换。
361.如图1和图6所示,行驶车体1具有检测预备贮存部59中的秧苗残量的降低的预备残量传感器59d。预备残量传感器59d能采用检测预备残量传感器59d中的秧苗重量的负荷传感器、或者检测各预备秧苗台59b中的毯状秧苗的有无的限位开关等。
362.方向控制部60m在自动方向转换控制的执行状态下,在根据预备残量传感器59d的
检测而检测出预备贮存部59中的秧苗残量的降低的状态下,当根据第一残量检测部24a的输出而检测出载置于秧苗载台24的任意的毯状秧苗的残量降低到秧苗补给用的设定值时,在使秧苗补给通知用的第三通知部47d从熄灭状态切换到闪烁状态之后,使自动方向转换控制从执行状态切换到停止状态,并且使第六通知部47g进行连续工作而向驾驶者通知未执行自动方向转换控制。
363.由此,驾驶者能够认识到向秧苗载台24的秧苗补给并且向预备贮存部59的秧苗补给的必要性。并且,在行驶车体1到达田埂边的方向转换区域时,驾驶者进行基于主变速杆42向中立位置的操作或制动踏板44的踩踏操作等的行驶停止操作,由此能够在使行驶车体1的前端接近田埂的状态下使行驶车体1行驶停止。
364.结果为,能够使用车体前端侧的左右两端部所具有的升降台阶95等而快速地进行从田埂向秧苗载台24和预备贮存部59的秧苗补给。
365.如图6所示,ecu60具有:控制车速的车速控制部60q、以及推定出驾驶者从驾驶状态转移到除了驾驶以外的其他的作业状态的转移推定部60r。车速控制部60q在转移推定部60r推定出驾驶者转移到其他的作业状态的的情况下,执行使车速降低到设定车速的减速控制而使行驶车体1微速行驶。
366.在第一残量检测部24a的检测值降低到秧苗补给用的设定量的情况下,转移推定部60r推定出驾驶者转移到秧苗补给状态(其他的作业状态的一例)。在第二残量检测部31a的检测值降低到肥料补给用的设定值的情况下,转移推定部60r推定出驾驶者转移到肥料补给状态(其他的作业状态的一例)。在堵塞传感器35a检测出作沟器内的肥料堵塞的情况下,转移推定部60r推定出驾驶者转移到堵塞去除状态(其他的作业状态的一例)。
367.由此,转移推定部60r能够从根据第一残量检测部24a、第二残量检测部31a、或者堵塞传感器35a的检测而推定出驾驶者从驾驶状态转移到秧苗补给状态、肥料补给状态或者堵塞去除状态的阶段开始,通过车速控制部60q的减速控制而使车速降低。
368.结果为,在驾驶者从驾驶状态转移到秧苗补给状态、肥料补给状态或者堵塞去除状态之前所进行的行驶车体1的行驶停止操作中,能够缩短直到行驶车体1行驶停止所需的时间,由此驾驶者能够高效地从驾驶状态转移到秧苗补给状态、肥料补给状态、或者堵塞去除状态。
369.驾驶座席48具有:检测施加给驾驶座席48的负荷的变动的第一座席传感器48a;以及检测驾驶座席48从基准位置起的回旋移动的第二座席传感器48b。
370.在根据第一座席传感器48a的检测而检测出负荷的降低、并且根据第二座席传感器48b的检测而检测出驾驶座席48从基准位置起的回旋移动的情况下,转移推定部60r推定出驾驶者从驾驶状态转移到其他的作业状态。
371.由此,在驾驶者为了进行除了秧苗补给作业、肥料补给作业以及堵塞去除作业以外的其他的作业,未使行驶车体1行驶停止而从驾驶座席48离开的情况下,此时的动作由第一座席传感器48a和第二座席传感器48b检测。并且,转移推定部60r能够根据第一座席传感器48a和第二座席传感器48b的检测而推定出驾驶者从驾驶状态转移到除了秧苗补给状态、肥料补给状态以及堵塞去除状态以外的其他的作业状态,通过基于该推定的车速控制部60q的减速控制而使车速降低到设定车速从而使行驶车体1微速行驶。
372.并且,能够通过该车速的降低而使驾驶者发现忘记使行驶车体1行驶停止,能够促
使进行行驶车体1的行驶停止操作。另外,能够缩短在驾驶者进行行驶车体1的行驶停止操作之后直到行驶车体1行驶停止为止所需的时间。
373.另外,由于在根据第一座席传感器48a的检测而检测出负荷的降低并且根据第二座席传感器48b的检测而检测出驾驶座席48从基准位置起的回旋移动的情况下,转移推定部60r推定出驾驶者从驾驶状态转移到其他的作业状态,因此能够避免因根据由驾驶者对驾驶座席48的重新落座等引起的负荷的降低、或者在驾驶者的落座状态下的驾驶座席48的回旋移动而使车速控制部60q执行减速控制所引起的作业效率的降低。
374.转移推定部60r根据配备于驾驶部40的手动式的第四切换开关96的操作而切换到工作状态和停止状态。
375.由此,例如在作业行驶的结束附近等判断为驾驶者不需要进行秧苗补给作业和肥料补给作业等其他的作业的情况下,能够通过将转移推定部60r切换到停止状态,而避免因车速控制部60q的减速控制所引起的车速的降低。
376.结果为,在不需要进行其他的作业的情况下,能够避免因车速控制部60q的减速控制使车速降低而引起的作业效率的降低。
377.ecu60具有转移检测部60s,该转移检测部60s在预备残量传感器59d检测残量的降低的情况下检测出驾驶者从驾驶状态转移到秧苗补给状态。车速控制部60q在根据车速传感器92的输出而检测出行驶车体1的行驶的状态下,在转移检测部60s检测出驾驶者转移到秧苗补给状态的情况下,执行上述的减速控制而使车速降低到零速。
378.由此,能够防止在维持着行驶车体1的行驶状态的情况下驾驶者进行秧苗补给作业。
379.转移检测部60s根据配备于驾驶部40的手动式的第五切换开关97的操作而切换到工作状态和停止状态。
380.由此,关于通过基于转移检测部60s的检测的车速控制部60q的减速控制而使行驶车体1自动停止,能够切换到采用的状态和不采用的状态。
381.在执行减速控制的情况下,车速控制部60q使装备于通知装置47的由led构成的第七通知部47h闪烁,并向驾驶者通知车速因减速控制的执行而降低。
382.由此,能够避免在车速因车速控制部60q的减速控制而降低时驾驶者感到不适的可能性。
383.如图6和图7所示,ecu60具有通电控制部60t,该通电控制部60t控制绕过主开关61地从电池37向卫星导航装置87和惯性测量装置88的通电。行驶车体1具有:插入安装于从电池37到卫星导航装置87的送电路线中的第一保持继电器98a;以及插入安装于从电池37到惯性测量装置88的送电路线中的第二保持继电器98b。并且,由通电控制部60t、第一保持继电器98a以及第二保持继电器98b构成通电保持部98,该通电保持部98能够绕过主开关61地从电池37向卫星导航装置87和惯性测量装置88通电。
384.通电保持部98通过由通电控制部60t向第一保持继电器98a通电而将第一保持继电器98a切换到闭合状态,从而切换到从电池37向卫星导航装置87通电的第一通电保持状态,并且通过由通电控制部60t停止向第一保持继电器98a通电而将第一保持继电器98a切换到断开状态,从而切换到停止从电池37向卫星导航装置87通电的第一通电停止状态。
385.通电保持部98通过由通电控制部60t向第二保持继电器98b通电而将第二保持继
电器98b切换到闭合状态,从而切换到从电池37向惯性测量装置88通电的第二通电保持状态,并且通过由通电控制部60t停止向第二保持继电器98b通电而将第二保持继电器98b切换到断开状态,从而切换到停止从电池37向惯性测量装置88通电的第二通电停止状态。
386.通电保持部98与主开关61的切断操作连动地切换到第一通电保持状态和第二通电保持状态。另外,伴随着该切断操作,计时部60c开始计时。并且,当在切换到第一通电保持状态和第二通电保持状态之后直到经过了设定时间为止的期间中进行了主开关61的连接操作的情况下,通电保持部98与该连接操作连动地从第一通电保持状态和第二通电保持状态切换到第一通电停止状态和第二通电停止状态,并且当在直到经过了设定时间为止的期间中未进行主开关61的连接操作的情况下,伴随着设定时间的经过而从第一通电保持状态和第二通电保持状态切换到第一通电停止状态和第二通电停止状态。通电保持用的设定时间能够通过配备于驾驶部40的时间设定器99的操作而任意地设定。时间设定器99能采用瞬时开关等。
387.根据该结构,例如如果在时间设定器99中将设定时间设定成比假定为作业行驶的中断时间的最长时间(例如,午餐所需的休息时间等)长的时间,则即使在驾驶者为了防止因休息等引起的作业行驶的中断过程中的多余的燃料消耗而进行主开关61的切断操作从而停止发动机7的情况下,也能够防止向卫星导航装置87和惯性测量装置88的通电伴随着主开关61的切断操作而停止,其中,该卫星导航装置87在从开始通电之后直到能够进行使用了卫星的测位为止所需的加载时间较长,该惯性测量装置88具有当未进行预热运转时测定精度不稳定的陀螺仪等。
388.由此,当驾驶者在结束休息等时操作主开关61而启动发动机7的情况下,能够与发动机7的启动一同再次开始使用了自动直线前进控制的作业行驶。
389.另外,例如如果在时间设定器99中将设定时间设定成最短时间(例如,0分或者1分等),则在驾驶者伴随着作业的完成而进行主开关61的切断操作的情况下,向卫星导航装置87和惯性测量装置88的通电与主开关61的切断操作一同停止,或者,伴随着从主开关61的切断操作开始经过了最短的设定时间,通电保持部98自动地从第一通电保持状态和第二通电保持状态切换到第一通电停止状态和第二通电停止状态,而停止向卫星导航装置87和惯性测量装置88通电,因此能够抑制在作业完成后还不必要地持续向卫星导航装置87和惯性测量装置88通电。
390.结果为,能够在不会导致作业效率的降低等的情况下,防止休息中等的多余的燃料消耗,而且能够防止作业完成后的多余的电力消耗。
391.通电保持部98具有插入安装于从电池37到通知装置47的送电路线的第三保持继电器98c。并且,通过由通电控制部60t向第三保持继电器98c通电而将第三保持继电器98c切换到闭合状态,从而切换到从电池37向通知装置47通电的第三通电保持状态,并且通过由通电控制部60t停止向第三保持继电器98c通电而将第三保持继电器98c切换到断开状态,从而切换到停止从电池37向通知装置47通电的第三通电停止状态。
392.通知装置47在通电保持部98的第三通电保持状态下的工作中,通过液晶显示部47a显示卫星导航装置87和惯性测量装置88处于通电保持部98的通电保持状态以及通电保持部98从通电保持状态切换到通电停止状态为止的剩余时间等作为与通电保持状态相关的信息而向驾驶者通知。
393.由此,驾驶者能够容易地确认通电保持部98是否处于通电保持状态以及直到通电保持部98切换到通电停止状态为止的剩余时间等。
394.卫星导航装置87和惯性测量装置88具有由led构成的工作灯87b、88a,该工作灯87b、88a在这些工作状态下点亮,而通知它们处于工作状态。
395.通电控制部60t具有用于保持向卫星导航装置87和惯性测量装置88通电的第一设定时间和用于保持向通知装置47通电的第二设定时间作为上述的设定时间。并且,第一设定时间被设定为比第二设定时间长的时间。
396.即,从作业效率的方面出发,将作为与通知装置47相比通电保持的重要度较高的卫星导航装置87和惯性测量装置88的通电保持时间的第一设定时间设定为比作为通知装置47的通电保持时间的第二设定时间长的时间。
397.由此,与使通电保持的重要度较高的卫星导航装置87和惯性测量装置88的通电保持时间与通电保持的重要度较低的通知装置47的通电保持时间相同的情况相比,能够在不会导致作业效率的降低的情况下,抑制休息中等的电池37的消耗。
398.当利用主开关61的切断操作来切断从电池37起的通电时,ecu60像上述那样通过内部的自保持电路60a维持通电状态并且开始进行计时部60c的计时。另外,通过通电保持部98的控制工作而维持向卫星导航装置87和惯性测量装置88的通电状态并且维持向通知装置47的通电状态。然后,在保持着不进行主开关61的连接操作的状态下,当第二设定时间经过时停止向通知装置47通电,当第一设定时间经过时停止向卫星导航装置87和惯性测量装置88通电,当利用自保持电路60a维持通电状态的设定时间经过时,停止自保持电路60a的通电而停止工作。
399.即,利用自保持电路60a将通电保持的重要度最高的ecu60维持在通电状态的设定时间被设定为比第一设定时间和第二设定时间长的时间。
400.〔另一实施方式〕
401.本发明不限于上述的实施方式中例示的结构,以下例示出本发明的代表性的另一实施方式。
402.〔1〕作业车也可以构成为取代左右的后轮6b而具有左右的履带的半履带规格。
403.另外,作业车也可以构成为取代左右的前轮6a和左右的后轮6b而具有左右的履带的全履带规格。
404.〔2〕作业车也可以取代左右的侧离合器17而具有左右的侧离合器制动,并构成为作为行驶车体1的方向转换状态(小回旋状态)出现使回旋内侧的侧离合器制动进行工作的制动回旋状态的制动回旋规格。
405.另外,作业车也可以取代左右的侧离合器17而具有前轮增速装置,并构成为作为行驶车体1的方向转换状态(小回旋状态)出现使回旋外侧的前轮6a增速的前轮增速回旋状态的前轮增速回旋规格。
406.另外,作业车作为方向转换也可以进行使用后退行驶的开关转向。
407.〔3〕作业车也可以是具有控制对地作业装置a的倾角的侧倾控制部的结构。
408.〔4〕作业车也可以构成为不进行作业控制部60g的非作业状态切换控制和作业状态切换控制。
409.〔5〕作业车也可以构成为不进行发动机控制部60h的发动机临时停止控制和发动
机再启动控制。
410.〔6〕对地作业装置a也可以是直播装置、旋转耕耘装置、掘土、插秧装置、收割装置、割草装置以及铲斗等。
411.〔7〕路线设定部60l例如也可以构成为通过事先的测量或者先前的作业行驶时等,根据按照每个作业地设定有绕转种植用的各作业行驶路线r2a~r2d和往复种植用的各作业行驶路线r1a~r1e等作业地数据等来设定目标直线前进路线rs。
412.〔8〕条件判定部60k也可以构成为在中断开关58b检测出主变速杆42移动到作业中断位置58e时,判定出发动机7的临时停止条件成立。
413.另外,条件判定部60k例如也可以构成为在检测出示教用的第一开关89或者第二开关90的长按操作、或者第一开关89或者第二开关90的双按操作等已有的开关的特殊操作时,判定出发动机7的临时停止条件成立。
414.另外,条件判定部60k也可以构成为在检测出已有的开关的特殊操作之后,例如在确保了发动机7的输出转速为设定转速(例如怠速转速)以下、电池37的电压为设定值以上、以及发动机冷却水的温度为设定值(例如55度)以上等适于发动机7的再启动的条件时,判定出发动机7的临时停止条件成立。
415.〔9〕地点存储部60n例如也可以存储有利用事先的测量或者先前的作业行驶时等所得到的每个作业地的各转换开始地点pc、pd。
416.〔10〕地点存储部60n也可以构成为存储有行驶车体1从直线前进状态转移到方向转换状态的转换开始地点pc、pd以及行驶车体1从方向转换状态转移到直线前进状态的转换结束地点,到达判定部60p判定行驶车体1是否到达转换开始地点pc、pd,并且判定行驶车体1是否到达转换结束地点,方向控制部60m在判定出到达判定部60p到达行驶车体1的转换开始地点pc、pd时开始进行自动方向转换控制,在到达判定部60p判定出行驶车体1到达转换结束地点时结束自动方向转换控制。
417.〔11〕也可以将第二通知部47c装备于中心标识器93,该第二通知部47c在田埂边回旋的结束后向驾驶者通知行驶车体1的当前位置相对于目标直线前进路线rs的偏移量以及行驶车体1的当前方位相对于目标直线前进路线rs的偏移角是处于允许范围外还是处于允许范围内。
418.〔12〕测位单元86作为卫星导航装置87也可以具有dgps(差动gps:differential gps)、或者rtk-gps(实时动态gps:real time kinematic gps)等。
419.〔13〕测位单元86也可以取代卫星导航装置87而例如具有使用激光来测量车体的位置的光学式的测量装置。
420.〔14〕残量检测部24a、31a也可以构成为在基于测位单元86的测位结果的运算处理中检测贮存部24、31中的残量。
421.具体而言,残量检测部24a、31a例如在基于贮存部24、31中的供给物的贮存量、每单位距离的供给物的供给量、以及作为测位单元86的测位结果而得到的作业地上的行驶距离等的运算处理中检测贮存部24、31中的残量。
422.即,作为残量检测部24a、31a不具有检测供给物的残量的专用的传感器,能够检测贮存部24、31中的残量。
423.〔15〕推移检测部70也可以是检测方向盘41的转动操作量作为前轮6a的舵角的旋
转传感器、或者直接检测左右一方的前轮6a的舵角的旋转式的电位计或者旋转编码器等。
424.〔16〕转移推定部60r也可以构成为在根据第一座席传感器48a的检测而检测出负荷的降低的情况下,推定出驾驶者转移到其他的作业状态。
425.〔17〕转移推定部60r也可以在根据第二座席传感器48b的检测而检测出驾驶座席48从基准位置起的回旋移动的情况下,推定出驾驶者转移到其他的作业状态。
426.〔18〕转移检测部60s也可以构成为在根据第一座席传感器48a的检测而检测出负荷的降低并且根据第二座席传感器48b的检测而检测出驾驶座席48从基准位置起的回旋移动的情况下,检测出驾驶者从驾驶状态转移到其他的作业状态,在车速控制部60q根据车速传感器92的输出而检测出行驶车体1的行驶的状态下,在转移检测部60s检测出驾驶者从驾驶状态转移到其他的作业状态的情况下,执行上述的减速控制而使车速降低到零速。
427.〔19〕转移检测部60s也可以构成为在根据第一座席传感器48a的检测而检测出负荷的降低的情况下,检测出驾驶者从驾驶状态转移到其他的作业状态。
428.另外,转移检测部60s也可以构成为在根据第二座席传感器48b的检测而检测出驾驶座席48从基准位置起的回旋移动的情况下,检测出驾驶者从驾驶状态转移到其他的作业状态。
429.〔20〕通电保持部98也可以由插入安装于从电池37到卫星导航装置87和惯性测量装置88的送电路线中的单一的保持继电器和控制保持继电器的工作的通电控制部60t构成。
430.〔21〕通知装置47也可以构成为在通电保持部98的第三通电保持状态下的工作中进行通过液晶显示部47a等促使驾驶者启动发动机7的通知工作。
431.〔22〕不良情况传感器35a例如也可以是检测直播装置的各作沟器内的各种堵塞的堵塞传感器。
432.〔23〕预备贮存部59也可以载置预备的肥料袋。
433.产业上的可利用性
434.本发明具有能够升降的对地作业装置,能够应用于在作业地上进行往复行驶的作业的乘用插秧机、乘用直播机、耕耘规格的牵引车、插秧规格的牵引车、装载机规格的牵引车,联合收割机、乘用割草机以及轮装载机等作业车。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1