一种适用于光刻机照明系统的多轴控制系统的制作方法
1.本发明涉及多轴运动控制技术领域,具体涉及一种适用于光刻机照明系统的多轴控制系统。
背景技术:
2.在浸没光刻机照明系统中,均匀性校正组件和光瞳校正组件均采用音圈电机作为执行器驱动手指来对光场和光瞳进行校正,其中均匀性校正组件和光瞳校正组件所使用的电机数量总共近百个,现有的多轴控制系统在系统集成上非常不友好,在浸没光刻机照明系统中,若采用现有的多轴控制系统来控制近百路电机运动,则总体积将远远超出控制器的物理空间约束需求,同时,接线也异常复杂,因此,针对浸没光刻机照明系统的近百路电机的控制,需要重新研发一种紧凑的多轴控制系统方案。
技术实现要素:
3.为解决光刻机照明系统中均匀性校正组件和光瞳校正组件中多轴电机运动控制的问题,本技术提供一种适用于光刻机照明系统的多轴控制系统,通过多级并行控制,提高多轴电机的伺服周期,进而提高多轴电机的运动性能。
4.本发明提供的技术方案如下:
5.本发明提供一种适用于光刻机照明系统的多轴控制系统,光刻机照明系统包括均匀性校正组件和光瞳校正组件,所述多轴控制系统用于控制所述均匀性校正组件和光瞳校正组件共同包含的多路电机,所述多轴控制系统包括:
6.通讯控制板;
7.驱动控制板,根据预设条件配置所述驱动控制板的容量,并根据所述驱动控制板的配置容量将多路电机按照数量组合进行划分,以将多路电机划分成与所述驱动控制板的配置容量相匹配的电机集群;
8.所述驱动控制板的使用数量与被划分的所述电机集群的数量一一对应;
9.所述通讯控制板相对所述驱动控制板的使用数量分别配置有相互独立的通讯接口,以使各个所述驱动控制板与所述通讯控制板并行通讯;
10.所述驱动控制板相对所述电机集群中的各路电机分别配置有在物理上相互独立的用于向电机发送控制命令的控制端口,以使所述驱动控制板并行控制所述电机集群中的各路电机。
11.进一步优选的,各路电机分别配置有相应的驱动控制模块,所述驱动控制模块包括控制器、驱动器和存储器,所述控制器的输入端与所述驱动控制板上的控制端口电信号连接,所述控制器的输出端与所述驱动器的输入端电信号连接,所述驱动器的输出端与所述电机电信号连接,所述存储器与所述控制器电信号连接。
12.进一步优选的,所述驱动控制板的容量被配置为容纳16轴,进而,将76路电机按照16路电机组合进行划分,所述16路电机组合成一所述电机集群。
13.进一步优选的,所述驱动控制板分别配置有在物理上相互独立的16路spi总线接口。
14.进一步优选的,相对所述电机集群还配置有用于对所述电机集群中的16路电机的运动参数进行调试的调试电路板。
15.进一步优选的,所述调试电路板配置有用于选择待调试电机的选择器。
16.进一步优选的,所述选择器相对16路电机配置有16路通道,所述选择器通过将输入信号译码成16位,以选择相应的通道,进而选择对应的待调试电机。
17.进一步优选的,所述预设条件包括接口接插件的引脚数量、所述通讯控制板和驱动控制板在光刻机照明系统中的空间限制、与所述配置容量相匹配的电机集群的多轴调试。
18.进一步优选的,所述驱动控制模块与所述驱动控制板间接或直接通讯。
19.通过本发明提供的多轴控制系统,至少具有以下一项效果:
20.1)结合接插件的引脚数量、驱动控制板的空间限制等条件配置驱动控制板的容量,并根据驱动控制板的容量将多路电机进行集群划分,且多个驱动控制板与通讯控制板之间并行通讯,及驱动控制板与电机集群中的各电机之间并行控制,从而,通过多级并行控制将多路电机的并行动作的可能性调到了最大,尽可能地缩短了每路电机控制的伺服周期。
21.2)每路电机分别配置有独立的驱动控制模块,不仅易于维护,而且通过驱动控制模块承担各自电机的计算工作,例如,承担控制电机运动的路径规划计算等工作,以达到减少驱动控制板工作负荷的目的。
22.3)针对16路电机的调试工作,引入了具有通道选择的调试电路板,通过信号自动接入某一路电机进行调试,与现有的手动插拔接入某一路电机进行调试相比,极大地简化了调试过程。
附图说明
23.图1为现有典型的伺服电机运动控制系统图;
24.图2为本技术的多轴控制系统原理图;
25.图3为图2的另一表现形式示意图;
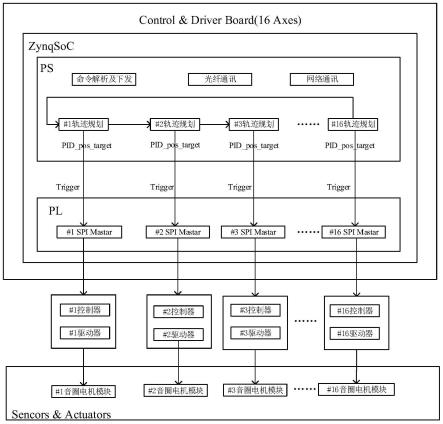
26.图4为驱动控制板的逻辑控制图;
27.图5为驱动控制模块原理示意图;
28.图6为16路电机与驱动控制板配合示意图;
29.图7为16路电机通道选择示意图;
30.图8为16路电机通道选择界面示意图。
具体实施方式
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,并获得其它的实施方式。
32.在浸没光刻机照明系统中,均匀性校正组件和光瞳校正组件均采用音圈电机作为执行器驱动手指来对光场和光瞳进行校正,其中均匀性校正组件中用到了60个音圈电机,光瞳校正组件中用到了16个音圈电机,均匀性校正组件和光瞳校正组件共有76个音圈电机,同时均匀性校正组件和光瞳校正组件采用了相同型号的光栅尺和读数头,故可以将均匀性校正组件和光瞳校正组件进行统一控制,也即是对76个音圈电机进行统一控制。
33.典型的伺服电机运动控制系统如图1所示,包括中央处理器、运动控制器、驱动器和集成调试环境,以omron的集成8轴控制能力的pbc和pbl为例,pbc相当于图1中的mcu和motion controller的集成,而pbl则相当于在pbc的基础上集成了驱动器。
34.现有的多轴控制系统(如omron的pbc和pbl等)通常用于8个轴的控制,因此,若采用现有的多轴控制系统控制均匀性校正组件和光瞳校正组件的所有76个音圈电机,体积将远远超出系统的物理空间约束需求,同时接线也异常复杂,集成度低。基于此,本技术提供一种适用于光刻机照明系统的多轴控制系统,通过多级并行控制提高76个音圈电机的伺服周期。
35.本技术提供的一种适用于光刻机照明系统的多轴控制系统的原理示意图如图2所示,包括通讯控制板和驱动控制板。
36.其中,驱动控制板的容量根据预设条件进行配置,该预设条件包括:接口接插件的引脚数量、通讯控制板和驱动控制板在光刻机照明系统中的空间限制、与配置容量相匹配的电机集群中的各电机的调试等,例如,16轴差分信号的a、b和n至少需要96个引脚的接插件,如此数量引脚的接插件和线缆的选型非常有挑战性,机械设计也比较困难,优选的,本技术选择接口为100pin(引脚)的scsi接插件,通过预设条件使驱动控制板达到最佳配置,进一步也使整个多轴控制系统的设计达到最佳。
37.根据驱动控制板的配置容量将76路电机按照数量组合进行划分,以将76路电机划分成与驱动控制板的配置容量相匹配的电机集群。
38.具体的,驱动控制板的容量被配置为容纳16个轴,进而,将76路电机按照16路电机组合进行划分,该16路电机组合成一电机集群,如此划分,则划分5路电机集群即可容纳76路电机。
39.驱动控制板的使用数量与被划分的电机集群的数量一一对应,具体到本技术中,驱动控制板的数量为5个。
40.通讯控制板相对该5个驱动控制板分别配置有相互独立的通讯接口,以使各驱动控制板与通讯控制板并行通讯。
41.驱动控制板相对电机集群中的各路电机分别配置有在物理上相互独立的用于向电机发送控制命令的控制端口,以使驱动控制板并行控制电机集群中的各路电机。
42.结合上述的通讯控制板与5个驱动控制板并行通讯,及驱动控制板与电机集群中的16路电机并行控制,下面结合图3对多级并行控制进行具体描述。
43.如图3所示,图3中的high-level controller是高层控制器,pucs_commboard中的pucs是均匀性校正组件和光瞳校正组件多轴控制系统简称,commboard为通信板,故pucs_commboard其本质含义是通讯控制板,高层控制器可以是远程控制的服务器,与通讯控制板通讯连接,向通讯控制板发送多轴电机运动控制的命令,vca_ctrldrv_16axes为驱动控制板,每个驱动控制板并行控制16轴,在通讯方面,该5个驱动控制板与通讯控制板并行通讯,
相应的驱动控制i/o电路板(vca_ctrldrv_io_16axes)也采用16轴设计,驱动控制i/o电路板,主要功能包括:用于将光栅尺读数头的差分信号转换成单端信号,并将电平转换为核心控制器能接受的电平范围;及用于将音圈电机的驱动信号输出到执行器端。
44.具体到本技术中,驱动控制板是基于zynq芯片进行设计,相应的,驱动控制板基于zynq芯片实现16路电机并行控制的逻辑控制图如图4所示,zynq芯片包括ps端和pl端,pl端相对电机集群中的各路电机分别配置有在物理上相互独立的16路spi总线接口(也即是控制端口)。
45.进一步,各路电机分别配置有相应的驱动控制模块,驱动控制模块包括控制器、驱动器和存储器,控制器的输入端与驱动控制板上的spi总线接口电信号连接,控制器的输出端与驱动器的输入端电信号连接,驱动器的输出端与电机电信号连接,存储器与控制器电信号连接。
46.驱动控制板相对各驱动控制模块分别配置有接插口,各驱动控制模块通过相应的接插口设置于驱动控制板上。
47.进一步,驱动控制模块可以根据实际应用进行多样化设计,例如,驱动控制模块可以设置mcu,单轴电机驱动的计算过程可以在mcu中执行,以减少驱动控制板的工作负担,驱动控制模块的原理图如图5所示,spi1和spi2均为mcu芯片的外设接口。
48.在其它实施例中,驱动控制模块可以不设置mcu,单轴电机驱动的计算过程在驱动控制板中执行,例如,各路电机的轨迹规划在驱动控制板中计算,此种情况下,16路电机与驱动控制板配合示意图如图6所示。
49.基于驱动控制模块中是否配置mcu的可选择性,进一步,驱动控制模块与驱动控制板间接或直接通讯,例如,当驱动控制模块配置有mcu时,驱动控制模块通过mcu与驱动控制板间接通讯,具体的,驱动控制板的spi接口与mcu的spi1通讯,下发运动参数;而mcu的spi2接口控制tmc467x(控制器)、tmc6200(驱动器)和at25128b(存储器);再例如,当驱动控制模块未配置mcu时,驱动控制模块与驱动控制板直接通讯,具体的驱动控制板的spi接口替代mcu的spi2接口,直接控制tmc467x、tmc6200和at25128b。
50.进一步,实际应用中还需要对电机集群中的16路电机进行调试,目前的调试方式是:基于调试软件环境tmcl-ide对每一路电机进行调试,且因调试软件环境tmcl-ide只支持1路电机的调试,所以,每一路电机调试完成后,需要执行相应的拔线操作,并插入另一路电机,才能对另一路电机进行调试,对于16路电机来说这种反复的插拔操作不仅重复度高,且调试效率也特别低。
51.在本技术中,为了便于对16路电机的调试,相对电机集群还配置有用于对电机集群中的16路电机的运动参数进行调试的调试电路板,该调试电路板配置有用于选择待调试电机的选择器。
52.如图7所示,选择器相对16路电机配置有16路通道,选择通过将输入信号译码成16位数据信息,以选择相应的通道,进而选择对应的待调试电机。
53.选择器中的16路通道包含微型继电器,主要是通过程序控制微型继电器来选择相应的通道,具体的,通过可编辑逻辑器件(cpld)对输入信号进行译码来选择相应的通道,例如,上位机或者按键选择一个通道,其中,上位机通道选择的控制界面如图8所示,选择一通道后,输入信号经过stm32处理后,以relay_sel0(d)、relay_sel1(c)、relay_sel2(b)、
relay_sel3(a)传递到cpld的四个引脚。由cpld对处理后的输入信号进行译码成16位数据信息,也就是可以选择16个通道(通道0~通道15)。当abcd=4’b0000,则译码成16’b0000_0000_0000_0001,也就是选通通道0;
……
;同理当abcd=4’b1111,则译码成16’b1000_0000_0000_0000,也就是选择通道15。
54.上述的基本工作原理是:根据所选择的通道,通过cpld中的逻辑控制相应通道的spi总线联通,从而实现相应通道的电机调试。
55.下面通过实验进一步证明本技术提供的多轴控制系统具有高性能。
56.通过在tmc4671-eval kit上采用tmc-evalsystem程序试验,在spi总线读写速率为2.66mhz的时候,tmc4671实现轨迹规划的伺服周期约为50μs。如果采用一个spi master与16个spi slave(tmc4671)同时进行轨迹规划,伺服周期大约为0.8ms。为提高伺服周期,本技术采用16个spi master分别于16个spi slave(tmc4671)同时进行读写操作,这样可将之前的串行变为并行操作,伺服周期能提高到0.05ms左右。
57.通过本技术提供的多轴控制系统,结合接插件的引脚数量、驱动控制板的空间限制等条件配置驱动控制板的容量,并根据驱动控制板的容量将76路电机进行集群划分,且多个驱动控制板与通讯控制板之间并行通讯,及驱动控制板与电机集群中的各电机之间并行控制,从而,通过多级并行控制将76路电机的并行动作的可能性调到了最大,尽可能地缩短了每路电机的伺服周期。
58.以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1