一种基于扰动观测器的数据驱动云边协同控制方法及系统
本发明属于自动控制,具体涉及一种基于扰动观测器的数据驱动云边协同控制方法及系统。
背景技术:
1、信息技术的发展催生了许多科技理论成果,为人熟知的就有云计算、物联网、网络化控制及信息物理系统等。传统控制系统处理能力弱,智能程度低,而现实也要求控制系统具有更加强大、更加智能的功能,同时需要拥有更好的信息交互能力。目前控制系统的复杂度、规模都在增大,对存储、计算也有更高的要求,立足于云计算、物联网和网络化控制等理论技术的发展,云控制的概念被提出,但如何实现云平台、边缘系统和物理系统的相互协同(简称“云边协同”),达到制造系统的整体优化,从而高效、安全、高质量地完成制造全生命周期的各项活动和任务,是智能制造系统面临的重大挑战。近年来,智能制造系统中的云边协同问题受到产业界和学术界的关注。
2、目前,提出了数据驱动预测云控制,结合云计算与网络化控制的优势,利用物联网和信息物理系统能够建立复杂的、强大的智能控制系统,该智能控制系统仅依赖于历史输入输出数据,不需预先建立被控对象的数学模型,即可产生最优的预测控制序列。数据驱动预测控制作为一种控制算法,适用于各领域的被控对象,包括无人车、无人机、空调、电力等多种系统。以无人车控制为例,将无人车的位置、速度作为输出信号,将加速度作为控制输入信号,即可对无人车进行控制。对其他被控对象来说,根据其物理特性,都可以通过施加特定的控制输入信号,产生相应的输出信号,实现预期的控制效果。
3、然而,现有的数据驱动预测云控制系统缺少与边缘系统的协同交互。特别是在云端存在计算误差、云边存在通信时延的情况下,对边缘节点的控制品质将产生较大影响。
技术实现思路
1、有鉴于此,本发明提供了一种基于扰动观测器的数据驱动云边协同控制方法及系统,实现了云平台与边缘系统对物理系统的协同控制。
2、本发明提供的一种基于扰动观测器的数据驱动云边协同控制方法,包括以下步骤:
3、步骤1、在采样时刻k,边缘被控节点将被控对象的输入数据及其产生的输出数据同时发送至云端控制平台;
4、步骤2、云端控制平台根据接收到的被控对象的输入数据及输出数据生成云控制变量;
5、步骤3、云端控制平台将云端参数及云控制变量发送至边缘被控节点;
6、步骤4、当采样时刻k不大于输入数据hankel矩阵的最大行数时,边缘被控节点将云控制变量作为新的输入数据发送至被控对象;当采样时刻k大于输入数据hankel矩阵的最大行数时,边缘被控节点对云端参数、云控制变量、输入数据及输出数据进行补偿处理得到云边复合控制变量,再将云边复合控制变量作为新的输入数据发送至被控对象;
7、步骤5、若k小于阈值,则令k自加1,执行步骤1;若k不小于阈值,则结束流程。
8、进一步地,所述步骤2中云端控制平台根据接收到的被控对象的输入数据及输出数据生成云控制变量,包括以下步骤:
9、步骤2.1、采用公式(1)计算云端控制器的控制率参数lw和lu:
10、
11、其中,vp为中间变量记为wp为中间变量记为wp=[up,yp],yp为被控对象过去时段的输出数据的hankel矩阵,up为被控对象过去时段的输入数据,为vp的moore-penrose广义逆矩阵;
12、步骤2.2、采用公式(2)计算预测控制序列uf(k):
13、
14、其中,为控制率参数lu的转置。
15、步骤2.3、将预测控制序列uf(k)的第一项作为云控制变量ucloud(k)。
16、进一步地,所述步骤4中当采样时刻k大于输入数据hankel矩阵的最大行数时,边缘被控节点对云端参数、云控制变量、输入数据及输出数据进行补偿处理得到云边复合控制变量,包括以下步骤:
17、步骤4.1、采用扰动观测器根据云端参数估计得到控制总扰动如公式(3)所示:
18、
19、其中,p(k)为辅助变量,l为观测器增益系数,ai为云端参数lw的第一块行中的向量,bi为云端参数lw的第一块行中的向量,b为云端参数lu的第一个块行,i为参数编号且满足1≤i≤n;
20、步骤4.2、根据控制总扰动及云控制变量,采用公式(4)计算得到云边复合控制变量u(k):
21、
22、其中,ucom(k)为控制总扰动的补偿控制量。
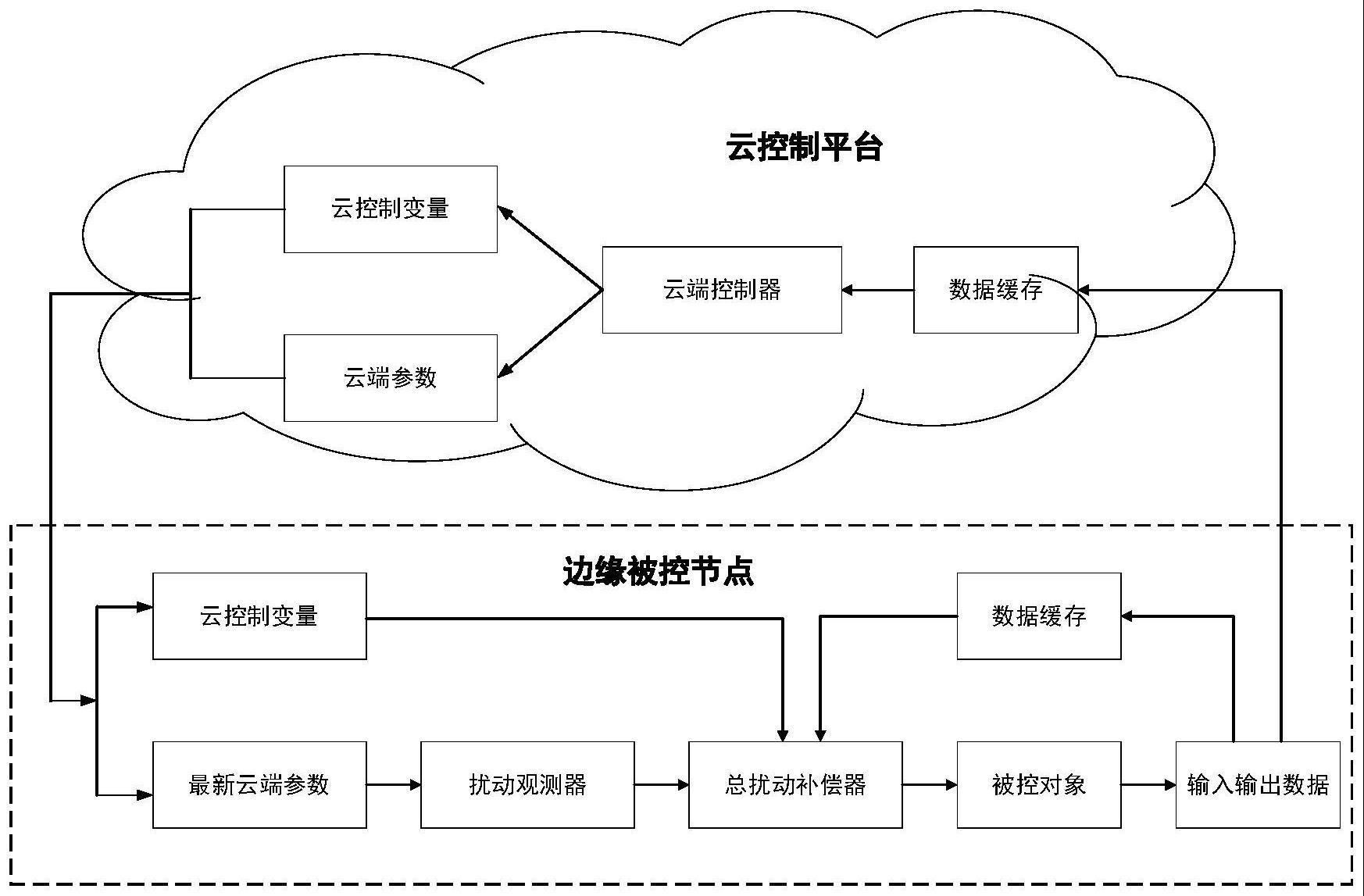
23、本发明提供的一种基于扰动观测器的数据驱动云边协同控制系统,包括云端控制单元、控制调度单元、扰动观测单元、总扰动补偿单元和被控对象;
24、其中,所述云端控制单元部署在云平台中,用于根据被控对象的输入数据和输出数据计算出云控制变量和云端参数;云控制变量用于实现对被控对象的控制,云端参数作为扰动观测单元的输入;
25、所述控制调度单元部署在边缘系统中,用于设置采样时刻,在采样时刻将被控对象的输入数据和输出数据发送至云端控制单元,当采样时刻小于或等于输入数据的hankel矩阵的最大行数时,将云端控制单元输出的云控制变量作为被控对象的输入数据发送给被控对象;当采样时刻大于输入数据的hankel矩阵的最大行数时,将云端控制单元输出的云端参数输入扰动观测单元、将云控制变量输入总扰动补偿单元;将从总扰动补偿单元得到的云边复合控制变量作为输入数据发送给被控对象;
26、所述扰动观测单元部署在边缘系统中,用于根据云端控制单元输出的云端参数计算得到控制总扰动,将控制总扰动发送到总扰动补偿单元;
27、所述总扰动补偿单元部署在边缘系统中,用于采用扰动观测单元输出的控制总扰动对云端控制单元输出的云控制变量进行补偿处理得到云边复合控制变量,将云边复合控制变量发送到控制调度单元;
28、所述被控对象部署在物理系统中,用于根据控制调度单元输出的输入数据执行操作并产生输出数据。
29、有益效果:
30、本发明通过在边缘系统中估计云控制系统中控制过程的总扰动,并以总扰动对云控制变量进行补偿后形成云边复合控制量,采用精确抗扰的云边复合控制量实现对被控对象的控制,消除了现有存在的由云端计算误差、云边通信时延等因素导致的扰动,提升了边缘系统计算资源的利用率,提高了数据驱动预测云控制系统的控制品质。
技术特征:
1.一种基于扰动观测器的数据驱动云边协同控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的数据驱动云边协同控制方法,其特征在于,所述步骤2中云端控制平台根据接收到的被控对象的输入数据及输出数据生成云控制变量,包括以下步骤:
3.根据权利要求1所述的数据驱动云边协同控制方法,其特征在于,所述步骤4中当采样时刻k大于输入数据hankel矩阵的最大行数时,边缘被控节点对云端参数、云控制变量、输入数据及输出数据进行补偿处理得到云边复合控制变量,包括以下步骤:
4.一种基于扰动观测器的数据驱动云边协同控制系统,其特征在于,包括云端控制单元、控制调度单元、扰动观测单元、总扰动补偿单元和被控对象;
技术总结
本发明公开了一种基于扰动观测器的数据驱动云边协同控制方法及系统,通过在边缘系统中估计云控制系统中控制过程的总扰动,并以总扰动对云控制变量进行补偿后形成云边复合控制量,采用精确抗扰的云边复合控制量实现对被控对象的控制,消除了现有存在的由云端计算误差、云边通信时延等因素导致的扰动,提升了边缘系统计算资源的利用率,提高了数据驱动预测云控制系统的控制品质。
技术研发人员:夏元清,高润泽,李启闻,詹玉峰,翟弟华,戴荔,孙中奇,吴楚格,张金会,闫莉萍,刘坤,郭泽华,崔冰,邹伟东,杨辰,张元,高寒
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!