车辆的路径规划方法及装置、存储介质、车辆、终端与流程
本发明涉及智能驾驶,特别是涉及一种车辆的路径规划方法及装置、存储介质、车辆、终端。
背景技术:
1、随着智能化驾驶技术的快速发展,对车辆行驶过程的控制越来越精细化。其中,车辆在行驶过程中通常在弗朗内特(frenet)坐标系下进行纵向规划,规划出车辆自动行驶的路径。
2、目前,现有在frenet坐标系下进行纵向路径规划时通常基于车辆在参考路径上的投影来规划在不同曲率转弯场景中的路径,然而,由于在大曲率转弯场景中,相距不同位置的障碍物在frenet坐标系下于车辆的投影距离相同,使得车辆与障碍物的投影无法有效的确认是否发生碰撞,大大降低了碰撞检测的准确性,产生较大的碰撞风险,从而降低了车辆的路径规划有效性。
技术实现思路
1、有鉴于此,本发明提供一种车辆的路径规划方法及装置、存储介质、车辆、终端,主要目的在于解决现有车辆的路径规划效率差的问题。
2、依据本发明一个方面,提供了一种车辆的路径规划方法,包括:
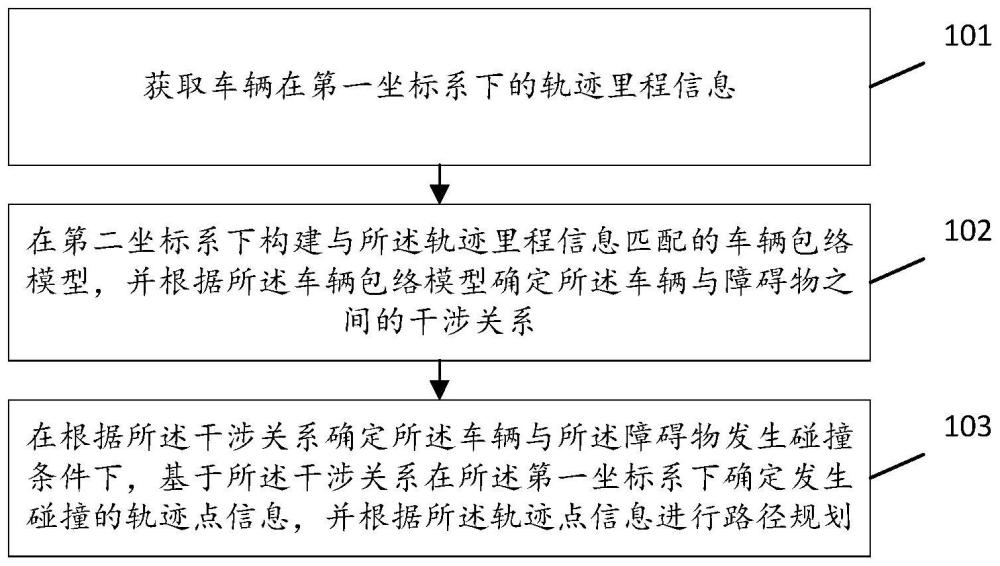
3、获取车辆在第一坐标系下的轨迹里程信息;
4、在第二坐标系下构建与所述轨迹里程信息匹配的车辆包络模型,并根据所述车辆包络模型确定所述车辆与障碍物之间的干涉关系;
5、在根据所述干涉关系确定所述车辆与所述障碍物发生碰撞条件下,基于所述干涉关系在所述第一坐标系下确定发生碰撞的轨迹点信息,并根据所述轨迹点信息进行路径规划。
6、进一步地,所述在第二坐标系下构建与所述轨迹里程信息匹配的车辆包络模型包括:
7、将所述第一坐标系下的轨迹里程信息转换为在所述第二坐标系下的车辆轮廓模型;
8、基于所述车辆的速度影响系数、车速、预设速度膨胀系数、曲率影响系数、轨迹曲率、预设曲率膨胀系数确定延伸长度;
9、在所述车辆轮廓模型的纵向方向上,按照所述延伸长度对所述车辆轮廓模型进行延伸构建,得到所述车辆包络模型。
10、进一步地,所述基于所述车辆的速度影响系数、车速、预设速度膨胀系数、曲率影响系数、轨迹曲率、预设曲率膨胀系数确定延伸长度包括:
11、从所述速度影响系数与所述车速的点乘值、所述预设速度膨胀系数中选取最大速度系数,并从所述曲率影响系数与所述轨迹曲率的点乘值、所述预设曲率膨胀系数中选取最大曲率系数;
12、根据所述最大速度系数与所述最大曲率系数的和运算,得到所述延伸长度。
13、进一步地,所述根据所述车辆包络模型确定所述车辆与障碍物之间的干涉关系包括:
14、获取所述障碍物在所述第二坐标系下的障碍物轮廓信息;
15、计算所述障碍物轮廓信息与所述车辆包络模型之间的重叠信息,并基于所述重叠信息确定干涉关系,所述干涉关系包括重叠干涉、非重叠干涉;
16、所述根据所述车辆包络模型确定所述车辆与障碍物之间的干涉关系之后,所述方法还包括:
17、若所述干涉关系为重叠干涉,则确定所述车辆与所述障碍物发生碰撞。
18、进一步地,所述基于所述干涉关系在所述第一坐标系下确定发生碰撞的轨迹点信息包括:
19、基于所述重叠信息将所述车辆在所述第二坐标系下发生碰撞的位置转换至所述第一坐标系下;
20、在所述第一坐标系下根据所述位置生成发生碰撞的轨迹点信息,所述轨迹点信息包括轨迹点索引以及碰撞轨迹里程信息。
21、进一步地,所述获取车辆在第一坐标系下的轨迹里程信息包括:
22、在所述第一坐标系下,获取预设规划帧中所述车辆横向轨迹规划的参考轨迹;
23、根据所述参考轨迹计算各轨迹点的轨迹里程信息。
24、进一步地,所述根据所述轨迹点信息进行路径规划包括:
25、在所述第一坐标系下,根据所述轨迹点信息中最小的碰撞轨迹里程信息更新用于纵向路径规划决策的路径边界;
26、根据更新后的所述路径边界进行纵向路径轨迹规划。
27、依据本发明另一个方面,提供了一种车辆的路径规划装置,包括:
28、获取模块,用于获取车辆在第一坐标系下的轨迹里程信息;
29、确定模块,用于在第二坐标系下构建与所述轨迹里程信息匹配的车辆包络模型,并根据所述车辆包络模型确定所述车辆与障碍物之间的干涉关系;
30、规划模块,用于在根据所述干涉关系确定所述车辆与所述障碍物发生碰撞条件下,基于所述干涉关系在所述第一坐标系下确定发生碰撞的轨迹点信息,并根据所述轨迹点信息进行路径规划。
31、进一步地,所述确定模块包括:
32、转换单元,用于将所述第一坐标系下的轨迹里程信息转换为在所述第二坐标系下的车辆轮廓模型;
33、确定单元,用于基于所述车辆的速度影响系数、车速、预设速度膨胀系数、曲率影响系数、轨迹曲率、预设曲率膨胀系数确定延伸长度;
34、构建单元,用于在所述车辆轮廓模型的纵向方向上,按照所述延伸长度对所述车辆轮廓模型进行延伸构建,得到所述车辆包络模型。
35、进一步地,所述确定单元,具体用于从所述速度影响系数与所述车速的点乘值、所述预设速度膨胀系数中选取最大速度系数,并从所述曲率影响系数与所述轨迹曲率的点乘值、所述预设曲率膨胀系数中选取最大曲率系数;根据所述最大速度系数与所述最大曲率系数的和运算,得到所述延伸长度。
36、进一步地,所述确定模块,具体用于获取所述障碍物在所述第二坐标系下的障碍物轮廓信息;计算所述障碍物轮廓信息与所述车辆包络模型之间的重叠信息,并基于所述重叠信息确定干涉关系,所述干涉关系包括重叠干涉、非重叠干涉;
37、所述确定模块,还用于若所述干涉关系为重叠干涉,则确定所述车辆与所述障碍物发生碰撞。
38、进一步地,所述规划模块包括:
39、转换单元,用于基于所述重叠信息将所述车辆在所述第二坐标系下发生碰撞的位置转换至所述第一坐标系下;
40、生成单元,用于在所述第一坐标系下根据所述位置生成发生碰撞的轨迹点信息,所述轨迹点信息包括轨迹点索引以及碰撞轨迹里程信息。
41、进一步地,所述获取模块,具体用于在所述第一坐标系下,获取预设规划帧中所述车辆横向轨迹规划的参考轨迹;根据所述参考轨迹计算各轨迹点的轨迹里程信息。
42、进一步地,所述规划模块还包括:
43、更新单元,用于在所述第一坐标系下,根据所述轨迹点信息中最小的碰撞轨迹里程信息更新用于纵向路径规划决策的路径边界;
44、规划单元,用于根据更新后的所述路径边界进行纵向路径轨迹规划。
45、依据本发明一个方面,提供了一种车辆,包括上述车辆的路径规划装置。
46、根据本发明的一方面,提供了一种存储介质,所述存储介质中存储有至少一可执行指令,所述可执行指令使处理器执行如上述车辆的路径规划方法对应的操作。
47、根据本发明的一方面,提供了一种终端,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
48、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行上述车辆的路径规划方法对应的操作。
49、借由上述技术方案,本发明实施例提供的技术方案至少具有下列优点:
50、本发明提供了一种车辆的路径规划方法及装置、存储介质、车辆、终端,与现有技术相比,本发明实施例通过获取车辆在第一坐标系下的轨迹里程信息;在第二坐标系下构建与所述轨迹里程信息匹配的车辆包络模型,并根据所述车辆包络模型确定所述车辆与障碍物之间的干涉关系;在根据所述干涉关系确定所述车辆与所述障碍物发生碰撞条件下,基于所述干涉关系在所述第一坐标系下确定发生碰撞的轨迹点信息,并根据所述轨迹点信息进行路径规划,实现以构造车辆延伸包络的形式,延伸车辆的碰撞检测范围,大大提高了碰撞检测的准确性,从而提高了车辆的路径规划有效性。
51、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!