机器人运动控制方法、装置、机器人及存储介质与流程
本公开涉及机器人,尤其涉及一种机器人运动控制方法、装置、机器人及存储介质。
背景技术:
1、随着技术的发展,机器人的应用范围逐渐扩大。例如,有物流类机器人、服务类机器人等。机器人在应用的过程中,可能会按照预先设置的轨迹运动。在运动过程中,须确定机器人实际位置,才能检验是否按照预设轨迹运动。目前,通常采用gps模块对机器人的实际位置进行定位。但是,gps模块定位的精度较低。gps模块的精度无法满足机器人的定位需求。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种机器人运动控制方法、装置、机器人及存储介质。
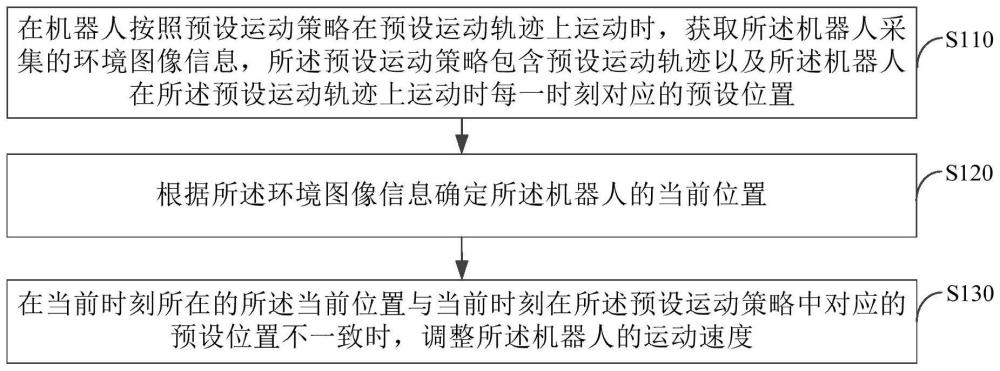
2、根据本公开实施例的第一方面,提供一种机器人运动控制方法,所述方法包括:在机器人按照预设运动策略在预设运动轨迹上运动时,获取所述机器人采集的环境图像信息,所述预设运动策略包含预设运动轨迹以及所述机器人在所述预设运动轨迹上运动时每一时刻对应的预设位置;根据所述环境图像信息确定所述机器人的当前位置;在当前时刻所在的所述当前位置与当前时刻在所述预设运动策略中对应的预设位置不一致时,调整所述机器人的运动速度。
3、可选地,所述机器人的运动环境中设置有定位标识,所述根据所述环境图像信息确定所述机器人的当前位置,包括:在所述环境图像信息中包括所述定位标识的图像时,根据所述定位标识在世界坐标系中的绝对位置坐标确定所述机器人的当前位置。
4、可选地,所述根据所述定位标识在世界坐标系中的绝对位置确定所述机器人的当前位置,包括:根据所述机器人拍摄所述图像信息的相机的参数,以及所述定位标识的图像在拍摄的图像信息中的图像坐标,确定所述机器人相对于所述定位标识的相对位置关系;根据所述相对位置关系以及所述定位标识在所述世界坐标系中的绝对位置坐标,确定所述机器人在所述世界坐标系中的当前位置。
5、可选地,所述定位标识为二维码,所述定位标识在世界坐标系中的绝对位置坐标通过扫描所述二维码的方式获得。
6、可选地,所述根据所述环境图像信息确定所述机器人的当前位置,包括:在所述环境图像信息中不包括所述定位标识的图像时,根据与所述机器人连接的运动平台上一次记录的所述机器人的位置,以及所述机器人在所述运动平台上一次记录所述机器人位置后生成的里程计信息,计算得到所述机器人的当前位置。
7、可选地,所述根据所述环境图像信息确定所述机器人的当前位置,包括:在所述环境图像信息中不包括所述定位标识的图像时,向所述机器人的遥控端发送通知指令,以通知用户遥控所述机器人移动至能够拍摄到所述定位标识的位置。
8、可选地,所述机器人为多个,所述方法还包括:确定多个所述机器人的运动轨迹;根据约束条件规划每一所述机器人在对应的运动轨迹上的运动策略;所述约束条件包括以下至少一者;任意两个机器人之间的距离在运动过程中大于第一距离阈值;每一机器人的运动速度不大于对应的速度阈值;在任一轨迹交点的第二距离阈值内,同一时间向所述轨迹交点运动的机器人至多为一个;多个所述机器人的在对应的运动轨迹上运动的时间相同。
9、可选地,所述机器人为多个,多个所述机器人在根据预设的运动策略在预设运动轨迹上运动之前,通过全球定位系统gps与卫星时间进行同步。
10、根据本公开实施例的第二方面,提供一种机器人运动控制装置,包括采集模块,用于在机器人按照预设运动策略在预设运动轨迹上运动时,获取所述机器人采集的图像信息,所述预设运动策略表征所述预设运动轨迹上的预设位置与机器人移动到该位置点的需求时间之间的对应关系;确定模块,用于根据所述图像信息确定所述机器人的当前位置;运动模块,用于在当前时刻所在的所述当前位置与当前时刻在所述预设运动策略中对应的位置点不一致时,调整所述机器人的运动速度。
11、根据本公开实施例的第三方面,提供一种机器人,包括:存储装置,其上存储有至少一个计算机程序;至少一个处理装置,用于执行所述存储装置中的所述至少一个计算机程序,以实现第一方面所述方法的步骤。
12、根据本公开实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序指令,该程序指令被处理器执行时实现第一方面所述方法的步骤。
13、本公开的机器人运动控制方法、装置、机器人及存储介质,在机器人按照预设运动策略在预设运动轨迹上运动时,获取机器人采集的环境图像信息,预设运动策略包含预设运动轨迹以及所述机器人在预设运动轨迹上运动时每一时刻对应的预设位置,根据环境图像信息确定机器人的当前位置,在当前时刻所在的当前位置与当前时刻在预设运动策略中对应的预设位置不一致时,说明机器人并未按照预设运动策略运动,调整机器人的运动速度,使得机器人按照预设运动策略运动。从机器人所在的运动环境中拍摄的图像信息,图像信息中的环境与机器人的距离较近,通过与机器人较近的环境来定位机器人当前位置,使得当前位置的误差小,便于更为精确的调节机器人的运动。
14、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种机器人运动控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述机器人的运动环境中设置有定位标识,所述根据所述环境图像信息确定所述机器人的当前位置,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述定位标识在世界坐标系中的绝对位置确定所述机器人的当前位置,包括:
4.根据权利要求2所述的方法,其特征在于,所述定位标识为二维码,所述定位标识在世界坐标系中的绝对位置坐标通过扫描所述二维码的方式获得。
5.根据权利要求2所述的方法,其特征在于,所述根据所述环境图像信息确定所述机器人的当前位置,包括:
6.根据权利要求2所述的方法,其特征在于,所述根据所述环境图像信息确定所述机器人的当前位置,包括:
7.根据权利要求1-6中任一项所述的方法,其特征在于,所述机器人为多个,所述方法还包括:
8.根据权利要求1-6中任一项所述的方法,其特征在于,所述机器人为多个,多个所述机器人在根据预设的运动策略在预设运动轨迹上运动之前,通过全球定位系统gps与卫星时间进行同步。
9.一种机器人运动控制装置,其特征在于,包括:
10.一种机器人,其特征在于,包括:
11.一种计算机可读存储介质,其上存储有计算机程序指令,其特征在于,该程序指令被处理器执行时实现权利要求1-8中任一项所述方法的步骤。
技术总结
本公开涉及一种机器人运动控制方法、装置、机器人及存储介质,涉及机器人技术领域,在机器人按照预设运动策略在预设运动轨迹上运动时,获取机器人采集的环境图像信息,预设运动策略包含预设运动轨迹以及所述机器人在预设运动轨迹上运动时每一时刻对应的预设位置,根据环境图像信息确定机器人的当前位置,在当前时刻所在的当前位置与当前时刻在预设运动策略中对应的预设位置不一致时,调整机器人的运动速度,使得机器人按照预设运动策略运动。从机器人所在的运动环境中拍摄的环境图像信息,环境图像信息中的环境与机器人的距离较近,通过与机器人较近的环境来定位机器人当前位置,使得当前位置的误差小,便于更为精确的调节机器人的运动。
技术研发人员:李东方
受保护的技术使用者:北京小米机器人技术有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!