自移动设备的控制方法及自移动设备与流程
本申请涉及人工智能,特别涉及自移动设备的控制方法。本申请同时涉及自移动设备,以及计算机可读存储介质。
背景技术:
1、随着计算机技术、互联网和人工智能技术的快速发展,自移动设备逐渐应用在工作生活的各个方面,如各种机器人。为实现自移动设备在实际使用场景(即实际物理空间)中的自动行走功能,需要基于自移动设备上的定位模块进行定位,控制自移动设备进行移动。
2、在现有技术中,由于边界遮挡、通道狭窄、视觉传感器的视野受限等问题,自移动设备在通过通道时无法准确定位,只能依赖自移动设备随机行走,概率性的通过通道,从一个区域到达另一个区域,完成相应任务。然而,上述方法中自移动设备无法准确、安全地通过通道,无法保证自移动设备可以顺利通过通道到达另外一个区域,完成相应任务,进而需要更准确更安全的方法进行自移动设备的控制操作或者处理。
技术实现思路
1、有鉴于此,本申请实施例提供了自移动设备的控制方法。本申请同时涉及自移动设备,以及计算机可读存储介质,以解决现有技术中存在的缺陷。
2、根据本申请实施例的第一方面,提供了一种自移动设备的控制方法,自移动设备用于从通道中通过,自移动设备设置有3d传感器,方法包括:
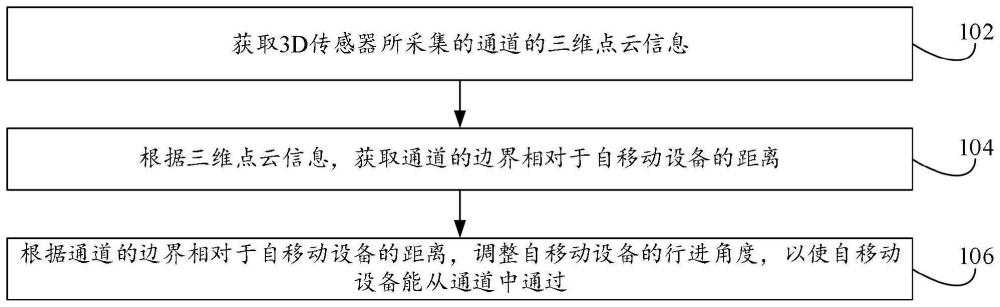
3、获取3d传感器所采集的通道的三维点云信息;
4、根据三维点云信息,获取通道的边界相对于自移动设备的距离;
5、根据通道的边界相对于自移动设备的距离,调整自移动设备的行进角度以使自移动设备能从通道中通过。
6、根据本申请实施例的第二方面,提供了一种自移动设备,其包括:
7、本体,
8、驱动模块,设置于本体,用于驱动本体在通道中通过;
9、执行模块,设置于本体,用于执行工作任务;
10、3d传感器,设置于本体;
11、存储器,用于存储计算机程序;
12、处理器,与存储器耦合,程序包括指令,指令在由处理器执行时使处理器执行操作,操作包括:
13、获取3d传感器所采集的通道的三维点云信息;
14、根据三维点云信息,获取通道的边界相对于自移动设备的距离;
15、根据通道的边界相对于自移动设备的距离,调整自移动设备的行进角度,以使自移动设备能从通道中通过。
16、根据本申请实施例的第三方面,提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现上述第一方面的自移动设备的控制方法的步骤。
17、本申请实施例提供的自移动设备的控制方法,自移动设备用于从通道中通过,自移动设备设置有3d传感器,自移动设备可以获取3d传感器所采集的通道的三维点云信息,然后根据三维点云信息,获取通道的边界相对于自移动设备的距离;之后,根据通道的边界相对于自移动设备的距离,调整自移动设备的行进角度以使自移动设备能从通道中通过。
18、这种情况下,可以通过自移动设备上设置的3d传感器进行辅助控制,3d传感器可以输出相对精度较高的三维点云信息,根据该三维点云信息可以准确确定出通道的边界相对于自移动设备的距离,根据通道的边界相对于自移动设备的距离,可以调整自移动设备的行进角度,以使自移动设备能顺利从通道中通过,避免自移动设备在定位信号较差的通道中,由于定位信号减弱而与通道边界发生碰撞,保证了自移动设备可以顺利从通过通道,一个区域到达另一个区域,执行相应工作任务,不同区域的工作任务可以一次执行,减少任务的复杂性,便于操作。
技术特征:
1.一种自移动设备的控制方法,所述自移动设备用于从通道中通过,所述自移动设备设置有3d传感器,其特征在于,所述方法包括:
2.根据权利要求1所述的自移动设备的控制方法,其特征在于,所述3d传感器为tof相机。
3.根据权利要求1或2所述的自移动设备的控制方法,其特征在于,所述通道具有相对设置的第一侧壁和第二侧壁,所述第一侧壁和所述第二侧壁形成所述通道的实体边界。
4.根据权利要求3所述的自移动设备的控制方法,其特征在于,步骤根据所述三维点云信息,获取所述通道的边界相对于所述自移动设备的距离,具体包括:
5.根据权利要求3所述的自移动设备的控制方法,其特征在于,步骤根据所述通道的边界相对于所述自移动设备的距离,调整所述自移动设备的行进角度以使所述自移动设备能从所述通道中通过,包括:
6.根据权利要求5所述的自移动设备的控制方法,其特征在于,步骤根据所述通道的边界相对于所述自移动设备的距离和预先设定的距离阈值,调整所述自移动设备的行进角度以使所述自移动设备能从所述通道中通过,包括:
7.根据权利要求5所述的自移动设备的控制方法,其特征在于,步骤根据所述通道的边界相对于所述自移动设备的距离和预先设定的距离阈值,调整所述自移动设备的行进角度以使所述自移动设备能从所述通道中通过,具体包括:
8.根据权利要求1或2所述的自移动设备的控制方法,其特征在于,所述自移动设备的行进角度通过设置于所述自移动设备上的陀螺仪获取。
9.根据权利要求1或2所述的自移动设备的控制方法,其特征在于,所述3d传感器设置于所述自移动设备的正前方。
10.一种自移动设备,其特征在于,其包括:
11.根据权利要求10所述的自移动设备,其特征在于,所述3d传感器设置于所述本体的正前方。
12.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如权利要求1-9中任一项所述的自移动设备的控制方法的步骤。
技术总结
本申请提供自移动设备的控制方法及自移动设备,自移动设备用于从通道中通过,自移动设备设置有3D传感器,自移动设备的控制方法包括:获取3D传感器所采集的通道的三维点云信息,然后根据三维点云信息,获取通道的边界相对于自移动设备的距离;之后,根据通道的边界相对于自移动设备的距离,调整自移动设备的行进角度以使自移动设备能从通道中通过。如此,可以根据通道的边界相对于自移动设备的距离,调整自移动设备的行进角度,以使自移动设备能顺利从通道中通过,避免自移动设备在定位信号较差的通道中与通道边界发生碰撞,保证了自移动设备可以顺利通过通道。
技术研发人员:张建越,于坤,蒋代红,王文
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!