一种航标巡检无人船及其巡检控制方法
本发明涉及航标巡检,具体涉及一种航标巡检无人船及其巡检控制方法。
背景技术:
1、对于航标巡检,目前都是以现场巡检为主,航标现场巡检主要都是依靠船舶靠近航标,然后由航标工爬上灯塔或浮标,检查航标的灯器有无损坏、灯质是否正常、航标性能是否适航等内容,平均巡检一座航标需要2小时左右,有时因浮标摇摆和体力原因,仍无法发现连接松动和配件脱落等故障,遇上礁石海域或狂风大浪等恶劣天气,根本无法巡检,造成巡检延误修复不及时等问题。
2、关于智能航标方面,智能航标主要是通过定位器和传感器实时获得航标定位、航标灯的亮灭、航标所在附近水域水文信息等从而判断是否进行人工维护,然而智能航标的运用也无法解决人工进行航标维护或替换成本高、危险系数高和劳动强度大等问题,同时智能航标无法对航标除航标灯外其他部件进行检查,航标异常维护不及时问题仍然存在。
3、目前现有技术中也有将图像识别技术与航标巡检结合,减少了航标管理人员的工作量,但是该设备安装在巡检船上,还是需要巡检人员出海巡检,航标巡检依然需要耗费大量的人力与物力,且无人机搭载摄像头进行航标巡检,存在电池续航差、受风浪影响大等劣势,当航标偏离预设范围时,若无法及时发现与处理,可能会对船只的航行安全造成影响。
技术实现思路
1、为了克服现有技术存在的缺陷与不足,本发明提供一种航标巡检无人船及其巡检控制方法,本发明实现实时高效的目标跟踪和检测,对航标进行360度绕行,达到更好的巡检效果。
2、为了达到上述目的,本发明采用以下技术方案:
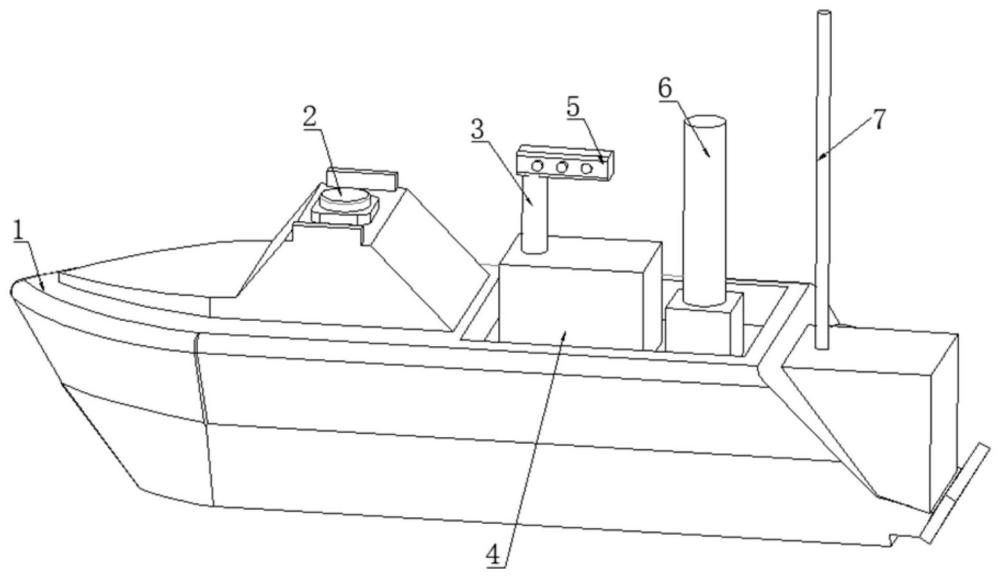
3、本发明提供一种航标巡检无人船,包括:巡检无人船本体、激光雷达、一维云台、工控机、高清摄像机和通信模块;
4、所述一维云台、激光雷达分别设于巡检无人船本体上,并分别与工控机连接;
5、所述高清摄像机分别与一维云台、工控机连接,所述工控机控制一维云台调整高清摄像机的转向,并获取高清摄像头采集的图像;
6、所述工控机用于基于yolov7目标检测算法与kcf目标跟踪算法进行航标检测及跟踪,基于双环pid算法控制航标巡检无人船进行自主巡航,输出运动控制指令;
7、所述激光雷达用于对水面巡检物体进行探测,同时检测水中的障碍物;
8、所述通信模块用于传输高清摄像头采集的图像以及激光雷达的检测信号,并获取航标巡检无人船的远程运动控制信号,传输至工控机;
9、所述巡检无人船本体设有运动控制板和驱动电机,所述驱动电机与运动控制板连接,所述运动控制板与工控机连接,用于接收工控机的运动控制指令,输出相应的控制波形至驱动电机,驱动电机驱动巡检无人船本体运动。
10、作为优选的技术方案,巡检无人船本体上还设有伸缩航标灯,所述伸缩航标灯包括伸缩机构和航标灯,航标灯设于伸缩机构的末端,伸缩机构、航标灯分别与工控机连接,工控机用于调整伸缩机构的长度,以及控制航标灯的开关状态。
11、作为优选的技术方案,所述巡检无人船本体还设有遥控信号接收器,用于接收遥控控制信号。
12、作为优选的技术方案,工控机通过通信模块与控制总站连接至同一片局域网,通信模块用于接收控制总站传输的信号,同时也将激光雷达、高清摄像机检测到的信号传输至控制总站内。
13、本发明还提供一种航标巡检无人船的巡检控制方法,设有上述航标巡检无人船,该巡检控制方法包括下述步骤:
14、基于yolov7目标检测算法与kcf目标跟踪算法进行航标检测及跟踪:
15、基于双环pid算法控制航标巡检无人船进行自主巡航;
16、运动控制板接收工控机的运动控制指令,包括:前进、后退、转向以及相应的速度信息,输出相应的控制波形至驱动电机,驱动电机驱动巡检无人船本体运动;
17、工控机获取要巡检的目标航标位置后,生成全局路径规划路线,巡检无人船本体沿着路线运行,同时激光雷达实时感知周围环境,进行局部路径规划与避障。
18、作为优选的技术方案,所述基于yolov7目标检测算法与kcf目标跟踪算法进行航标检测及跟踪,具体步骤包括:
19、基于yolov7目标检测算法进行航标目标检测,得到输入航标图像中的目标位置和类别信息,基于目标位置初始化目标跟踪器;
20、在每一帧中,基于kcf目标跟踪算法预测目标的位置,预测结果作为目标位置的初始估计;
21、基于kcf目标跟踪算法更新目标跟踪器的目标位置。
22、作为优选的技术方案,所述基于双环pid算法控制航标巡检无人船进行自主巡航,具体步骤包括:
23、当航标巡检无人船检测到靠近目标航标后,获取无人船当前的位置,目标航标的位置,基于激光雷达获取无人船和航标的距离d1,设定围绕航标的绕行半径为d2,计算两者的差值为:
24、δd=d2-d1
25、将距离的差值除以时间计算朝向航标的目标速度分量v′,具体表示为:
26、
27、获取航标巡检无人船当前朝向航标的速度为v2,速度v2和目标速度分量v′进入第一环速度pid控制器进行控制,计算得到误差e1:
28、e1=v2-v′
29、获取航标巡检无人船朝向船头方向的速度为v1,计算速度v1与航标连线方向的夹角为α,速度v1和速度v2的叠加速度为合速度v3,通过解速度矢量三角形得出合速度v3与航标连线方向的夹角β,夹角α和夹角β进入第二环角度pid控制器进行控制,计算得到误差e2:
30、e2=α-β
31、通过第二环角度pid控制器调节误差e2,夹角α趋近于夹角β,航标巡检无人船朝着圆周的切线方向做圆周绕行运动。
32、作为优选的技术方案,还包括遥控巡航步骤,当判定航标巡检无人船处于遥控巡航模式时,执行遥控巡航控制步骤,巡检无人船本体上设有遥控信号接收器,用于接收遥控控制信号,对信号进行模拟分析,完成对驱动电机的自主控制,通过遥控控制信号控制巡检无人船本体运动。
33、本发明与现有技术相比,具有如下优点和有益效果:
34、(1)本发明基于yolov7目标检测算法与kcf目标跟踪算法进行航标检测及跟踪,yolov7目标检测算法可以实现高效的目标检测,kcf目标跟踪算法具有较快的速度和较好的准确性,两者结合后可以实现实时高效的目标跟踪和检测。
35、(2)本发明基于双环pid控制算法对航标进行360度绕行,保持航标始终在画面中心,以达到更好的巡检效果。
技术特征:
1.一种航标巡检无人船,其特征在于,包括:巡检无人船本体、激光雷达、一维云台、工控机、高清摄像机和通信模块;
2.根据权利要求1所述的航标巡检无人船,其特征在于,巡检无人船本体上还设有伸缩航标灯,所述伸缩航标灯包括伸缩机构和航标灯,航标灯设于伸缩机构的末端,伸缩机构、航标灯分别与工控机连接,工控机用于调整伸缩机构的长度,以及控制航标灯的开关状态。
3.根据权利要求1所述的航标巡检无人船,其特征在于,所述巡检无人船本体还设有遥控信号接收器,用于接收遥控控制信号。
4.根据权利要求1所述的航标巡检无人船,其特征在于,工控机通过通信模块与控制总站连接至同一片局域网,通信模块用于接收控制总站传输的信号,同时也将激光雷达、高清摄像机检测到的信号传输至控制总站内。
5.一种航标巡检无人船的巡检控制方法,其特征在于,设有权利要求1-4任一项所述的航标巡检无人船,该巡检控制方法包括下述步骤:
6.根据权利要求5所述的航标巡检无人船的巡检控制方法,其特征在于,所述基于yolov7目标检测算法与kcf目标跟踪算法进行航标检测及跟踪,具体步骤包括:
7.根据权利要求5所述的航标巡检无人船的巡检控制方法,其特征在于,所述基于双环pid算法控制航标巡检无人船进行自主巡航,具体步骤包括:
8.根据权利要求5所述的航标巡检无人船的巡检控制方法,其特征在于,还包括遥控巡航步骤,当判定航标巡检无人船处于遥控巡航模式时,执行遥控巡航控制步骤,巡检无人船本体上设有遥控信号接收器,用于接收遥控控制信号,对信号进行模拟分析,完成对驱动电机的自主控制,通过遥控控制信号控制巡检无人船本体运动。
技术总结
本发明公开了一种航标巡检无人船及其巡检控制方法,该航标巡检无人船包括:巡检无人船本体、激光雷达、一维云台、工控机、高清摄像机和通信模块;工控机控制一维云台调整高清摄像机的转向,并获取高清摄像头采集图像;工控机基于YOLOV7目标检测与KCF目标跟踪进行航标检测及跟踪,基于双环PID控制航标巡检无人船自主巡航;激光雷达对水面巡检物体进行探测,同时检测水中的障碍物;通信模块传输高清摄像头采集的图像以及激光雷达的检测信号,并获取航标巡检无人船的远程运动控制信号;巡检无人船本体接收工控机的运动控制指令进行巡检。本发明实现实时高效的目标跟踪和检测,对航标进行360度绕行,达到更好的巡检效果。
技术研发人员:李伟华,陆智强,庄子昊,王建辉,刘呈,苏泽邦
受保护的技术使用者:暨南大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!