工业物联网环境下的无人机能量最优轨迹规划方法
本发明涉及无人机运动规划的一种无人机最优轨迹规划方法,具体而言,尤其涉及一种工业物联网环境下的无人机能量最优轨迹规划方法。
背景技术:
1、随着通信技术与物联网技术的快速发展,工业物联网(industrial internet ofthings,iiot)在制造、能源、交通等领域得到了广泛应用,许多工厂和部门部署了工业传感器设备与工业传感器网络,极大提高了工业自动化和生产效率。但是,由于iiot系统的设备资源与性能受限,存在着计算处理能力弱、通信数据安全和数据传输实时性等问题。对于这些问题,应用无人机技术是一种很好的解决方案。无人机一方面具有高机动性,能够快速到达指定位置提供大范围网络信号覆盖,另一方面可凭借搭载的高计算性能设备,帮助完成iiot设备的数据采集任务和iiot设备自身难以完成的计算密集型任务,可以很好地解决iiot设备性能受限所带来的问题。然而对于无人机,特别是旋翼无人机,其续航能力一直是制约其工作能力的重要因素之一。无人机的飞行轨迹对其能量消耗有着重要的影响,因此许多学者开始关注如何通过优化飞行轨迹来最小化能量消耗。在目前关于无人机能量最优轨迹规划研究中,现有方法大多基于力矩向量进行优化,并且需要依靠如acado、gposp和遗传算法等现有求解器来解决无中间航点的带无人机动力学约束的非线性优化问题。从现有无人机能量最优轨迹规划的算法来看,存在如下几点局限性:(1)由于力矩向量是关于时间的向量,基于力矩向量优化的方法一方面数值计算过程中离散程度会对优化效果产生直接影响,另一方面时变参数解空间维度过高,容易导致算法计算量巨大,求解耗时长等问题,实时性较差。(2)工业物联网环境下大多为具有多个中间航点状态约束的轨迹规划场景,现有方法无法直接应用。(3)需要依靠现有优化求解器,对于机器的算力和编程语言支持有一定限制。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种工业物联网环境下的无人机能量最优轨迹规划方法,以克服现有方法存在的基于力矩向量优化速度慢耗时长,依赖于优化求解器和不适用于多个中间航点状态约束场景等不足,解决带固定航点状态约束和无人机动力学约束的能量最优轨迹规划问题。
2、本发明的技术方案如下:
3、一、一种工业物联网环境下的无人机能量最优轨迹规划方法
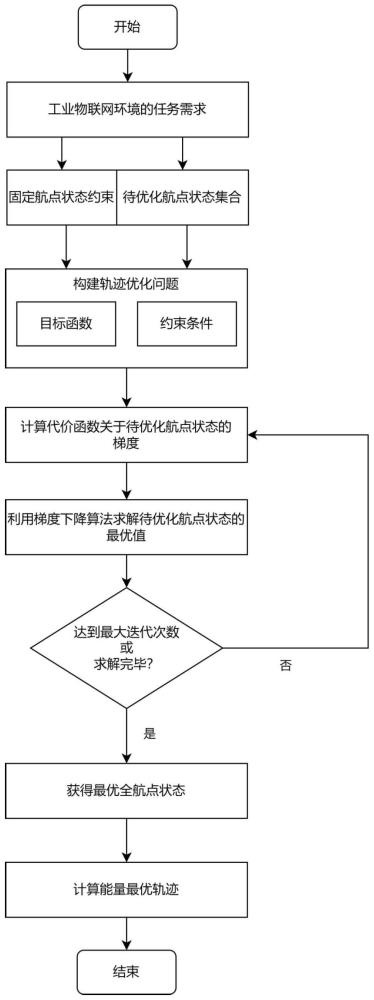
4、步骤一:根据工业物联网设备的数据采集任务和边缘计算服务需求设置无人机固定航点状态以及待优化航点状态;
5、步骤二:建立无人机的动力学模型和能量消耗模型,构建以最小化无人机能耗为目标函数,以无人机动力学和固定航点状态作为约束条件的无人机轨迹优化问题;
6、步骤三:根据无人机微分平坦性质和无人机动力学模型,结合待优化航点状态和步骤二中的无人机轨迹优化问题,得到目标函数关于待优化航点状态的梯度解析式;
7、步骤四:利用目标函数关于待优化航点状态的梯度解析式计算梯度,进而利用梯度下降算法循环迭代求解出待优化航点状态的最优值;
8、步骤五:通过待优化航点状态的最优值和固定航点状态得到最优全航点状态,基于最优全航点状态求解出无人机飞行轨迹的多项式系数,进而得到一条能量最优轨迹。
9、所述无人机固定航点状态包括无人机飞行航线的起点初始状态、终点初始状态以及执行任务所需经过的中间航点位置和该位置所需满足的运动状态;
10、所述待优化航点状态包括起点待优化状态、终点待优化状态以及执行任务所需经过的中间航点处可调整优化的运行状态;
11、起点初始状态和终点初始状态包含位置和偏航角时,则起点待优化状态和终点待优化状态至少包含速度和偏航角的一阶导数;起点初始状态和终点初始状态包含位置和位置的较低阶导数以及偏航角和偏航角的较低阶导数时,则起点待优化状态和终点待优化状态包含位置的较高阶导数和偏航角的较高阶导数。
12、所述步骤二中,当无人机为四旋翼无人机时,无人机轨迹优化问题的具体公式如下:
13、
14、
15、式中,e代表无人机消耗的能量;min表示取最小值;ωj(t)代表第j个电机的角速度;j,κτ和dv分别代表电机的转动惯量、空气阻力系数、电机的粘性阻尼系数;t0和tf分别代表轨迹的起始时间和终止时间;z(t)是所规划轨迹在t时刻的位置及各阶状态,t=t0,tf,ti;代表固定航点状态中的起点初始状态,代表固定航点状态中的终点初始状态,代表第i个中间航点的运动状态;m代表中间航点的数量;和分别代表大地坐标系下无人机在x,y和z方向上的加速度;φ(t),θ(t)和ψ(t)分别代表横滚角,俯仰角和偏航角;和分别代表横滚角,俯仰角和偏航角的一阶导数;和分别代表横滚角,俯仰角和偏航角的二阶导数;m代表无人机的质量,g代表重力加速度;ix,iy和iz分别代表无人机在x,y和z方向上的转动惯量;t(t)为电机总推力;τx(t),τy(t)和τz(t)分别表示第1个力矩矢量,第2个力矩矢量和第3个力矩矢量。
16、所述步骤三中,当无人机为四旋翼无人机时,目标函数关于待优化航点状态的梯度表达式如下所示:
17、
18、
19、其中,gj(t)代表在t时刻第j个电机角速度的平方,dp表示待优化航点状态,表示目标函数关于待优化航点状态的梯度;表示在t时刻第j个电机角速度ωj(t)的平方关于待优化航点状态的梯度。
20、所述步骤四中,梯度下降算法包括sgd算法、adam算法、bfgs算法和l-bfgs。
21、所述步骤五中,将最优全航点状态d*代入到多项式轨迹参数求解方程中,求解出无人机飞行轨迹的多项式系数p*,然后根据人机飞行轨迹的多项式系数p*分离出x维度最优轨迹系数y维度最优轨迹系数z维度最优轨迹系数ψ维度最优轨迹系数从而得到了一条满足固定航点状态约束且符合无人机动力学的能量最优轨迹,具体公式如下:
22、
23、
24、其中,为待优化航点状态的最优值,df为固定航点状态,t为转置,为多项式轨迹的增广映射矩阵。
25、二、一种计算机设备
26、所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述方法的步骤。
27、三、一种计算机可读存储介质
28、所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述的方法的步骤。
29、四、一种计算机程序产品
30、所述计算机程序产品包括计算机程序/指令,该计算机程序/指令被处理器执行时实现所述方法的步骤。
31、相比于现有技术,本发明的有益效果在于:
32、(1)本发明的优化变量为航点状态,解空间维度远低于现有基于力矩向量为优化变量的非线性优化方法,算法所需的算力更低,计算量更小,求解速度大幅提高,具有更好的实时性和可靠性。
33、(2)本发明结合目标函数梯度的解析表达式和梯度下降算法进行优化,相比遗传算法、蚁群算法、粒子群算法等启发式算法,本方法在无人机能量最优轨迹规划问题上具有更高的计算效率和优化效率。
34、(3)本发明不依赖于非线性优化求解器,算法易于实现,适用范围广。
35、(4)本发明可配合不同的梯度下降算法来使用,具有很好的实用性。
36、(5)本发明利用无人机微分平坦性质和航点状态得到能量最优轨迹,该轨迹具有天然满足固定航点状态约束和无人机动力学约束的良好性质,因此求解最优问题时无需考虑和检验固定航点状态约束和无人机动力学约束,求解复杂度低,收敛速度更快。
- 还没有人留言评论。精彩留言会获得点赞!